
- 1《Python基础教程(第三版)》阅读笔记暨Python3入门基础教程_python for everyone 第三版
- 2Cboard文档、百度Echartsugar_cboard使用手册
- 3使用IDEA上传代码至gitee_idea推送代码到git
- 4HDFS 启动与关闭_启动hdfs
- 5spark partitioner使用技巧_spark 怎么把 一批商家放在同一个partition
- 6计算机视觉———— 训练数据获取与处理_数据训练
- 7python学习第12周: Python matplotlib_import matplotlib.pyplot as plt from scipy import
- 8短信验证码转发_验证码 转发 程序
- 9Git出现SSL certificate problem 报错的解决方法_git unable to access ,ssl certificate problem
- 10AIGC绘画设计基础:AI整活!万物皆可建筑设计
STC89C52串口通信详解_stc89c52设置p1口串口
赞
踩
目录
前言
详细图解,同步和异步通信原理,单片机串口,通信速率计算,串口寄存器与工作方式
一.通信基本原理
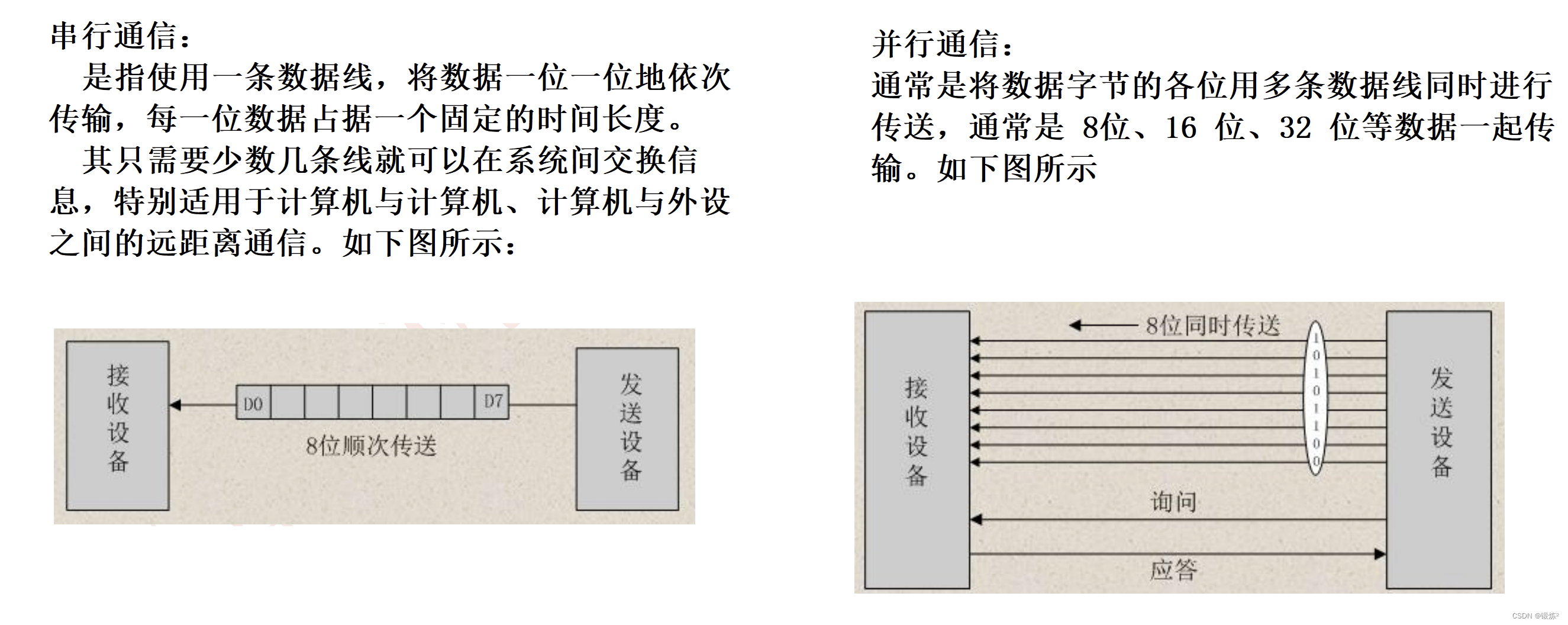
1.1串行通信与并行通信
串行通信:是指使用一条数据线,将数据一位一位地依次传输。
串行通信的特点:传输线少,长距离传送时成本低,且可以利用电话网等现 成的设备,但数据的传送控制比并行通信复杂。
并行通信:通常是将数据字节的各位用多条数据线同时进行传送。
并行通信的特点:控制简单、传输速度快;由于传输线较多,长距离传送时成本高且接收方的各位同时接收存在困难,抗干扰能力差。
1.2同步通信和异步通信
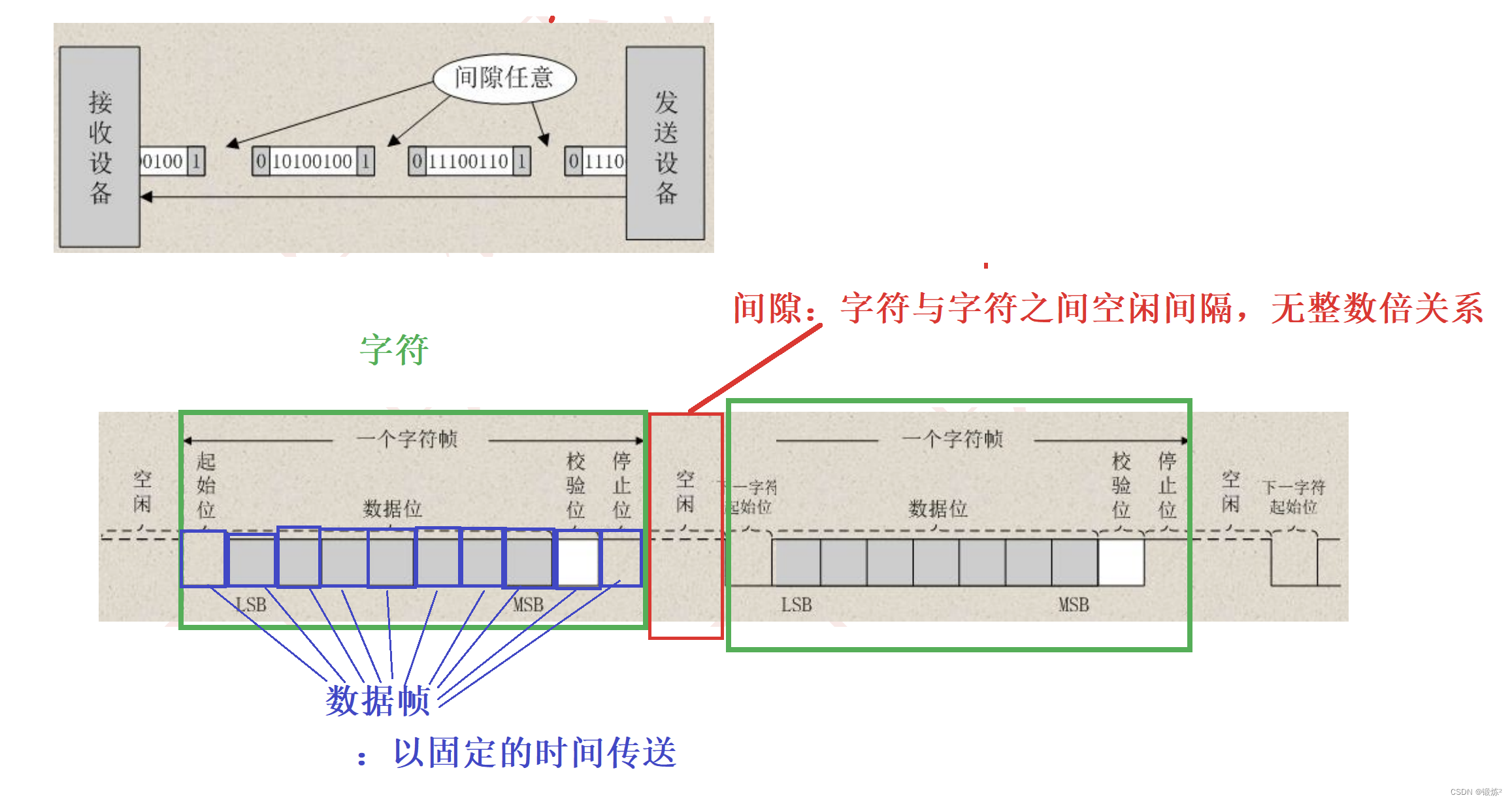
1.2.1异步通信
异步通信:发送和接收设备的时钟尽可能一致。以字符(构成的帧)为单位进行传输,字符与字符之间的间隙(时间间隔)是任意的,但每个字符中的各位是以固定的时间传送的。
异步通信的特点:不要求收发双方时钟的严格一致,实现容易,设备开销较小,但每个字符要附加 2~3 位用于起止位,各帧之间还有间隔,因此传输效率不高。
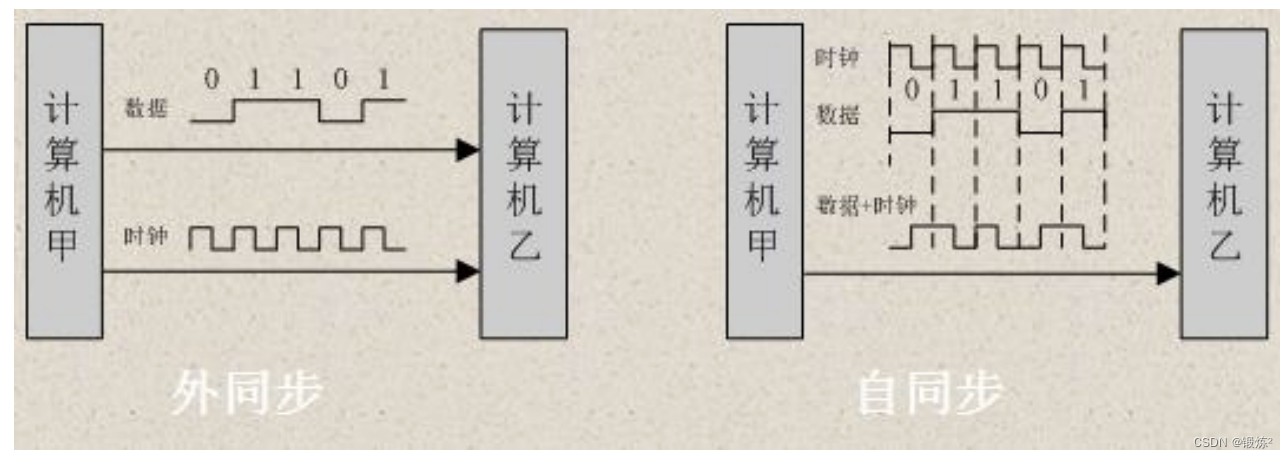
1.2.2同步通信
同步通信时要建立发送方时钟对接收方时钟的直接控制,使双方达到完全同步。此时,传输数据的位之间的距离均为“位间隔”的整数倍,同时传送的字符 间不留间隙,即保持位同步关系,也保持字符同步关系。发送方对接收方的同步可以通过两种方法实现。如下图所示
1.3单工、半双工与全双工通信

1.4通信速率
波特率和比特率是衡量通信传输速率的两个不同的参数,它们之间有着明确的区别。具体如下:
- 波特率:指的是每秒钟传送的信号变化次数,也称为传码率,单位是波特(Baud)。波特率决定了信息传输的速度和可靠性。在电子通信领域,波特即调制速率,指的是有效数据信号调制载波的速率,即单位时间内载波调制状态变化的次数。
- 比特率:表示的是每秒钟传输的二进制的位数,单位为bit/s。比特率是每秒钟传送的比特数量,又称为传信率。
此外,在某些情况下,如果每个信号符号只编码1比特的数据,那么比特率和波特率是相等的。例如,基础的二进制通信,其中每个信号变化(例如从高到低或从低到高)都表示一个比特。而在高阶调制中,如QPSK、16-QAM等,一个信号符号可能代表2比特、4比特或更多,这时比特率会大于波特率。这种情况比较少见,但在某些冗余编码或特定的编码方法中,可能需要多个信号变化来表示一个比特,从而导致比特率小于波特率。
衡量通信性能的一个非常重要的参数就是通信速率,通常以比特率(Bitrate)来表示。比特率是每秒钟传输二进制代码的位数,单位是:位/秒( bps)。如 每秒钟传送 240 个字符,而每个字符格式包含 10 位(1 个起始位、1 个停止位、 8 个数据位),
这时的比特率为: 10 位×240 个/秒 = 2400 bps
在后面会遇到一个“波特率”的概念,它表示每秒钟传输了多少个码元。而 码元是通信信号调制的概念,通信中常用时间间隔相同的符号来表示一个二进制 数字,这样的信号称为码元。如常见的通信传输中,用 0V 表示数字 0,5V 表 示数字 1,那么一个码元可以表示两种状态 0 和 1,所以一个码元等于一个二 进制比特位,此时波特率的大小与比特率一致;如果在通信传输中,有 0V、 2V、 4V 以及 6V 分别表示二进制数 00、 01、 10、 11,那么每个码元可以表示四 种状态,即两个二进制比特位,所以码元数是二进制比特位数的一半,这个时候 的波特率为比特率的一半。由于很多常见的通信中一个码元都是表示两种状态, 所以我们常常直接以波特率来表示比特率。
二.串口通信简介
串口通信(Serial Communication),是指外设和计算机间通过数据信号线、 地线等按位进行传输数据的一种通信方式,属于串行通信方式。串口是一种接口 标准,它规定了接口的电气标准,没有规定接口插件电缆以及使用的协议。
2.1接口标准
串口通信的接口标准有很多,有 RS-232C、 RS-232、 RS-422A、 RS-485 等。 常用的是 RS-232 和 RS-485。RS-232 其实是 RS-232C 的改进,原理是一样的。 这里我们就以 RS-232C 接口进行讲解
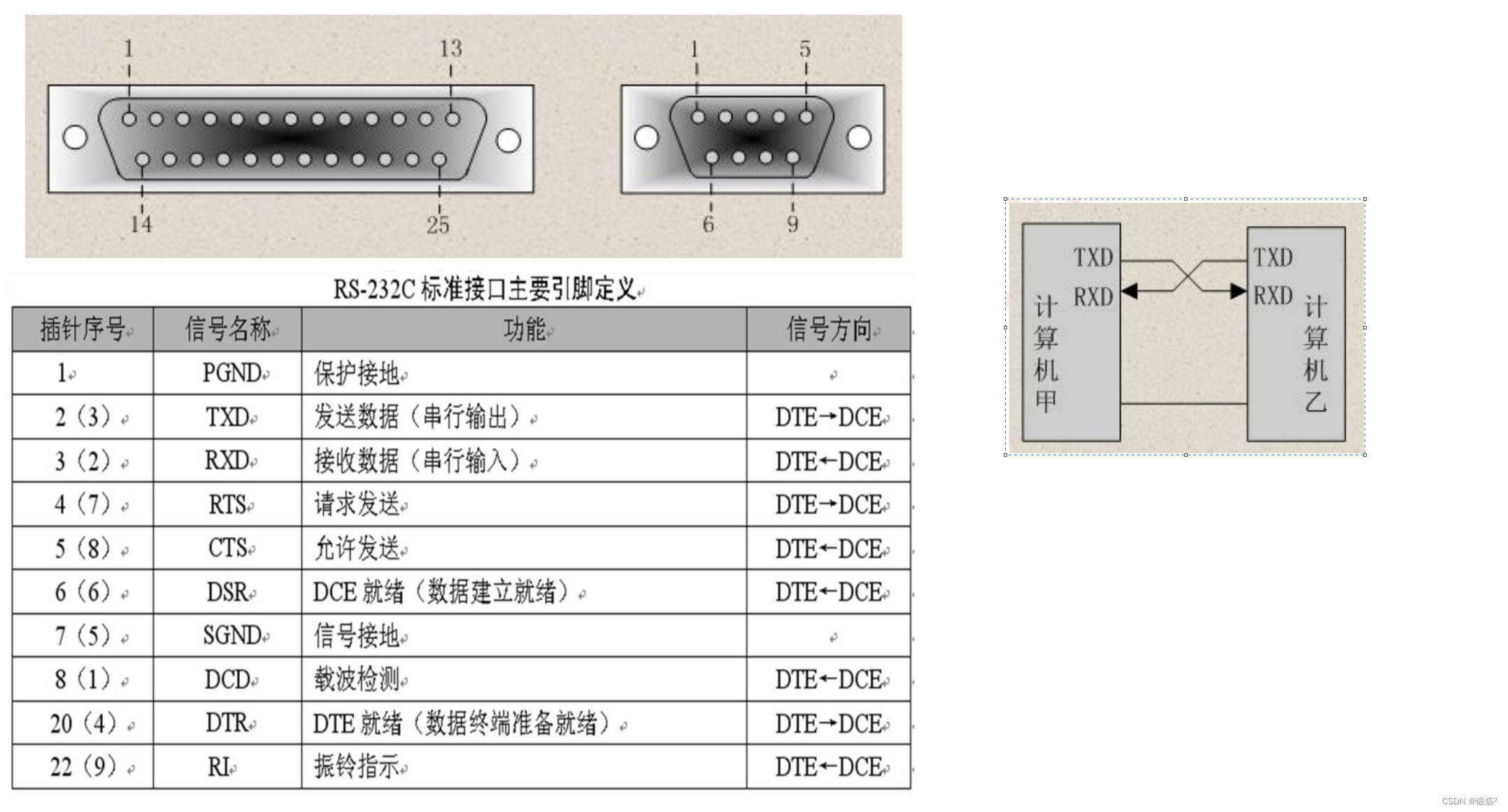
RS-232C 是 EIA(美国电子工业协会)1969 年修订 RS-232C 标准。RS-232C 定义了数据终端设备(DTE)与数据通信设备(DCE)之间的物理接口标准。
RS-232C 接口规定使用 25 针连接器,简称 DB25,连接器的尺寸及每个插 针的排列位置都有明确的定义,如下图所示
2.2串口内部结构
TXD 和 RXD 为单片机 IO 口,TXD 对应的是 P3.1 管脚,RXD 对 应的是 P3.0 管脚。

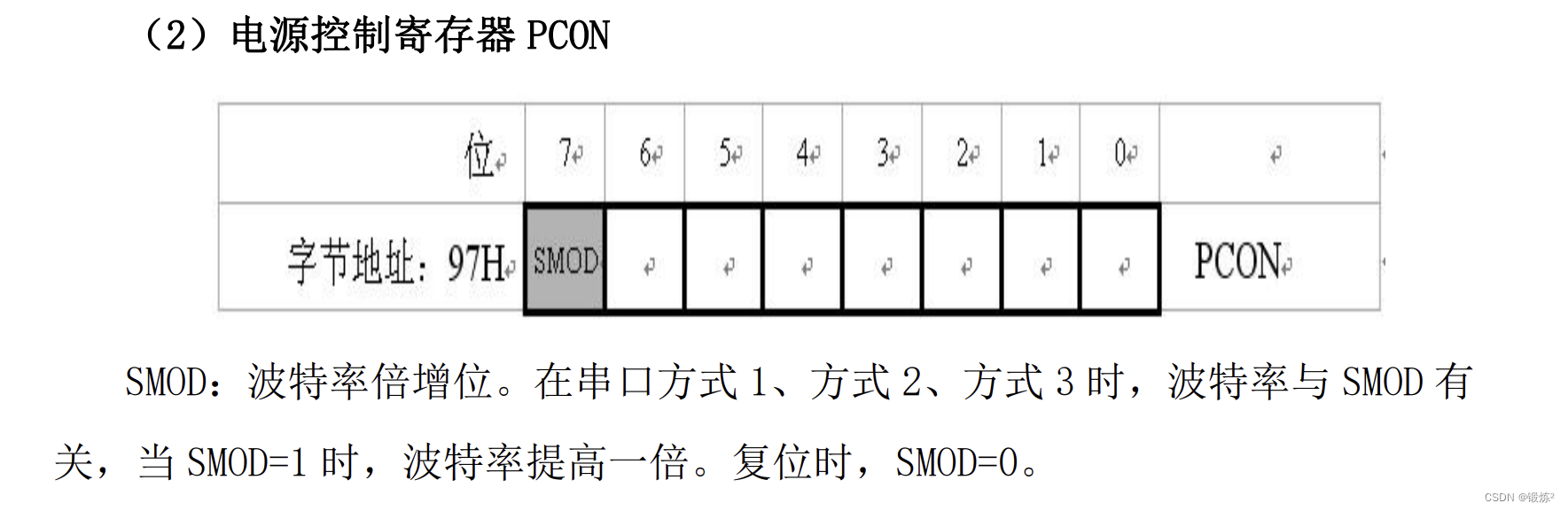
2.3串口相关寄存器
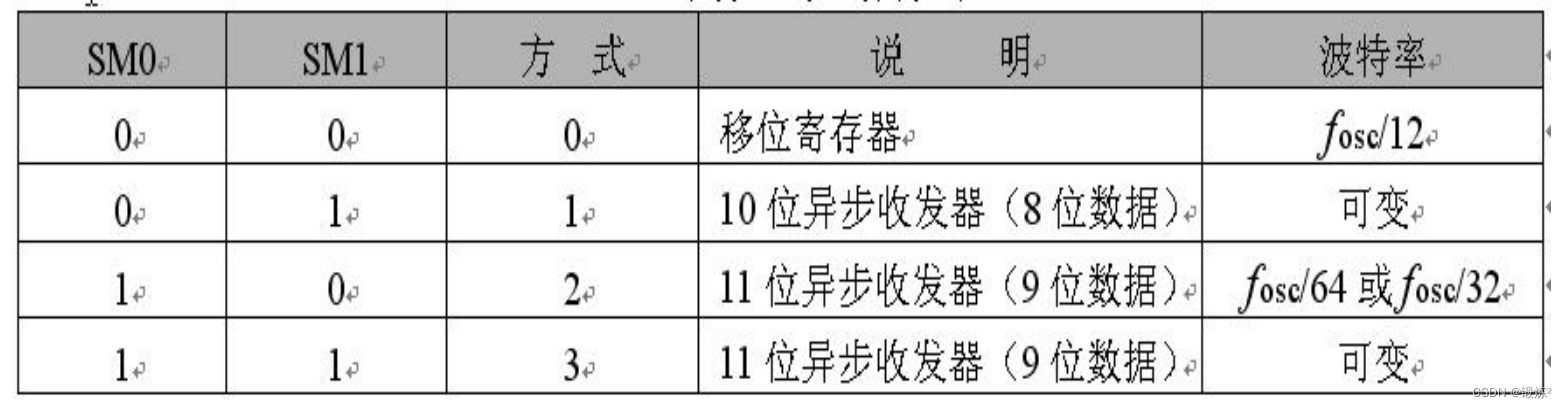
SM0 和 SM1为工作方式选择位:
SM2:多机通信控制位,主要用于方式 2 和方式 3。当 SM2=1 时可以利用收到 的 RB8 来控制是否激活 RI(RB8=0 时不激活 RI,收到的信息丢弃;RB8=1 时收 到的数据进入 SBUF,并激活 RI,进而在中断服务中将数据从 SBUF 读走)。当 SM2=0 时,不论收到的 RB8 为 0 和 1,均可以使收到的数据进入 SBUF,并激活 RI (即此时 RB8 不具有控制 RI 激活的功能)。通过控制 SM2,可以实现多机通信。
REN:允许串行接收位。由软件置 REN=1,则启动串行口接收数据;若软件置 REN=0,则禁止接收。
TB8:在方式 2 或方式 3 中,是发送数据的第 9 位,可以用软件规定其作用。 可以用作数据的奇偶校验位,或在多机通信中,作为地址帧/数据帧的标志位。 在方式 0 和方式 1 中,该位未用到。
RB8:在方式 2 或方式 3 中,是接收到数据的第 9 位,作为奇偶校验位或地 址帧/数据帧的标志位。在方式 1 时,若 SM2=0,则 RB8 是接收到的停止位。
TI:发送中断标志位。在方式 0 时,当串行发送第 8 位数据结束时,或在其 它方式,串行发送停止位的开始时,由内部硬件使 TI 置 1,向 CPU 发中断申请。 在中断服务程序中,必须用软件将其清 0,取消此中断申请。
RI:接收中断标志位。在方式 0 时,当串行接收第 8 位数据结束时,或在其 它方式,串行接收停止位的中间时,由内部硬件使 RI 置 1,向 CPU 发中断申请。 也必须在中断服务程序中,用软件将其清 0,取消此中断申请

三.串口工作方式
以上有4种工作模式,接下来使用方式1接下介绍
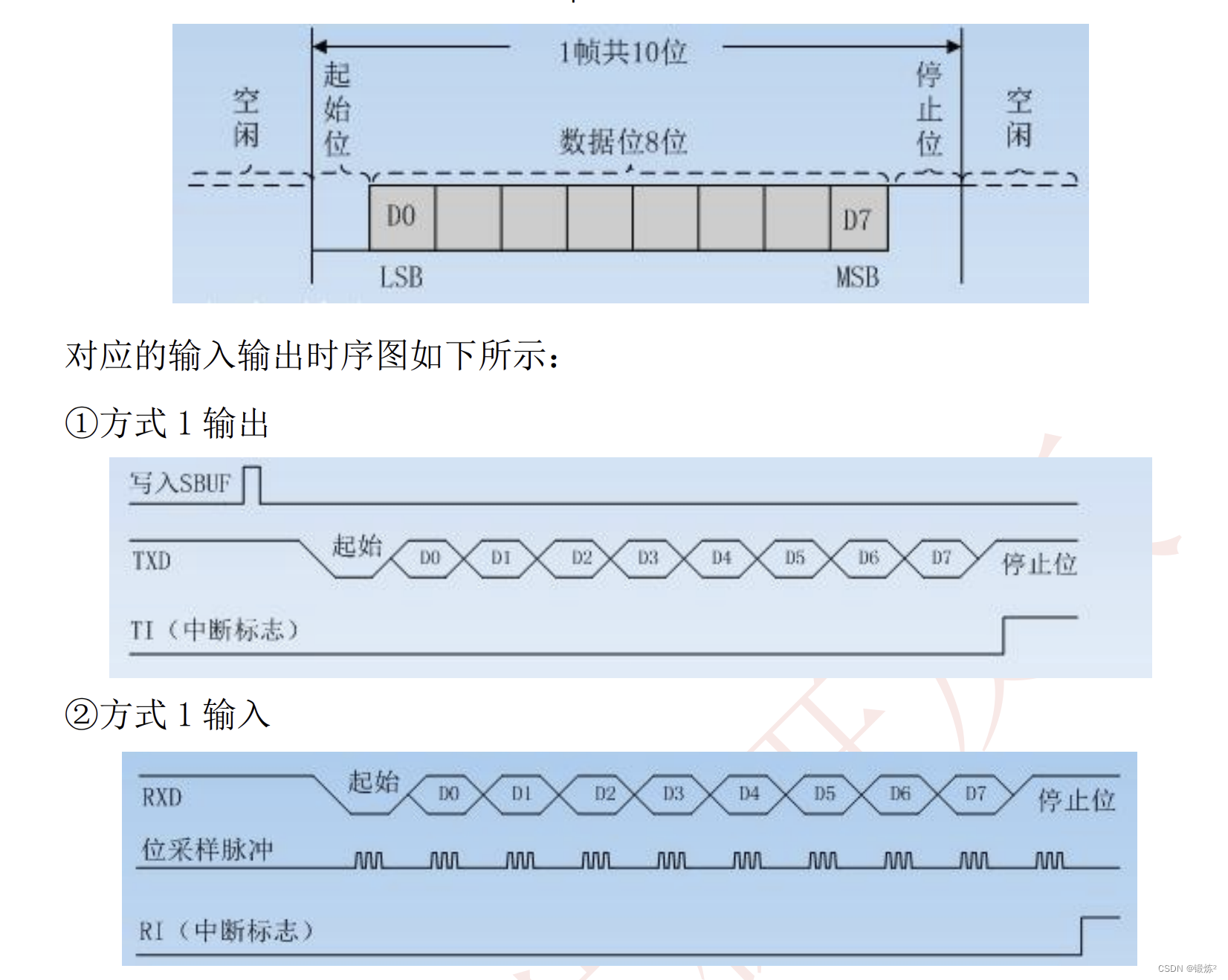
方式 1 是 10 位数据的异步通信口。TXD 为数据发送引脚,RXD 为数据接收引 脚,传送一帧数据的格式如下所示。其中 1 位起始位,8 位数据位,1 位停止位
用软件置 REN 为 1 时,接收器以所选择波特率的 16 倍速率采样 RXD 引脚电 平,检测到 RXD 引脚输入电平发生负跳变时,则说明起始位有效,将其移入输入 移位寄存器,并开始接收这一帧信息的其余位。接收过程中,数据从输入移位寄 存器右边移入,起始位移至输入移位寄存器最左边时,控制电路进行最后一次移 位。当 RI=0,且 SM2=0(或接收到的停止位为 1)时,将接收到的 9 位数据的前 8 位数据装入接收 SBUF,第 9 位(停止位)进入 RB8,并置 RI=1,向 CPU 请求中断
四.波特率计算
要计算STC89C52单片机的波特率,
可以采用以下公式: 波特率 = 定时器时钟频率 / (12 * (计数器初值 + 1))。
具体步骤如下:
- 确定晶振频率:需要知道STC89C52单片机使用的晶振频率。这是计算波特率的起点,因为定时器的时钟频率通常基于晶振频率。
- 计算定时器时钟频率:定时器时钟频率通常是晶振频率的1/12。例如,如果晶振频率是11.0592MHz,那么定时器时钟频率为921.6kHz。
- 设置SMOD位:SMOD是串口模式选择位,它会影响波特率的计算。SMOD位为0时,波特率误差较大;SMOD位为1时,波特率误差较小。这个设置在串口控制寄存器SCON中。
- 计算计数器初值:计数器初值是根据所需波特率和定时器时钟频率来计算的。计算公式为:计数器初值 = 65536 - (定时器时钟频率 / (12 * 波特率))。
- 设置定时器:根据计算出的计数器初值设置定时器1(TH1和TL1)。定时器1将被用作波特率发生器。
- 考虑波特率加倍:如果使用了波特率加倍功能,计算方法会有所不同。在这种情况下,公式变为:TH1 = TL1 = 256 - 晶振值/12/16/波特率。
- 编写初始化代码:根据上述设置,编写串口初始化代码,包括设置SCON、TMOD和TH1、TL1的值。
以下列出了几种方式下波特率的计算公式:
方式 0 的波特率 = fosc/12
方式 2 的波特率 =(2 SMOD/64)· fosc
方式 1 的波特率 =(2 SMOD/32)·(T1 溢出率)
方式 3 的波特率 =(2 SMOD/32)·(T1 溢出率)
其中 T1 溢出率 = fosc /{12×[256 -(TH1)]}
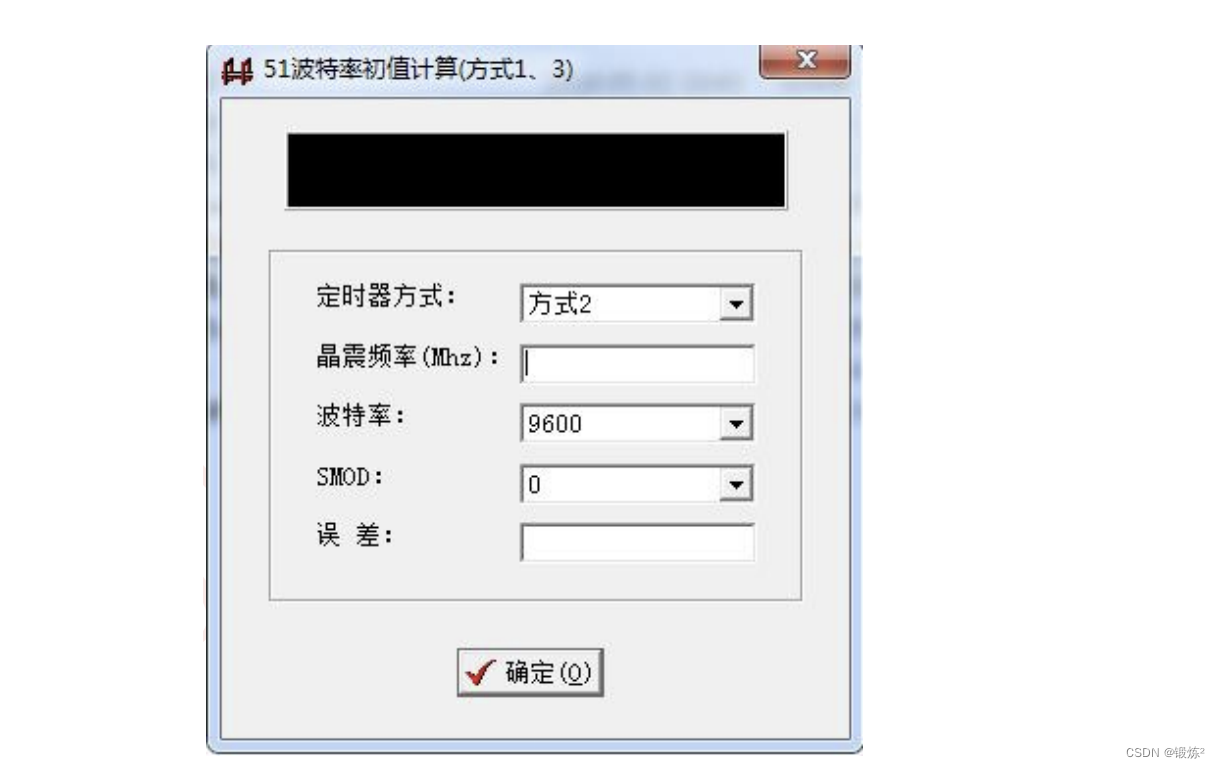
或者直接使用普中的软件进行波特率计算,这样更快
五.串口初始化步骤
我们使用定时器寄存器和串口寄存器

六.实验程序
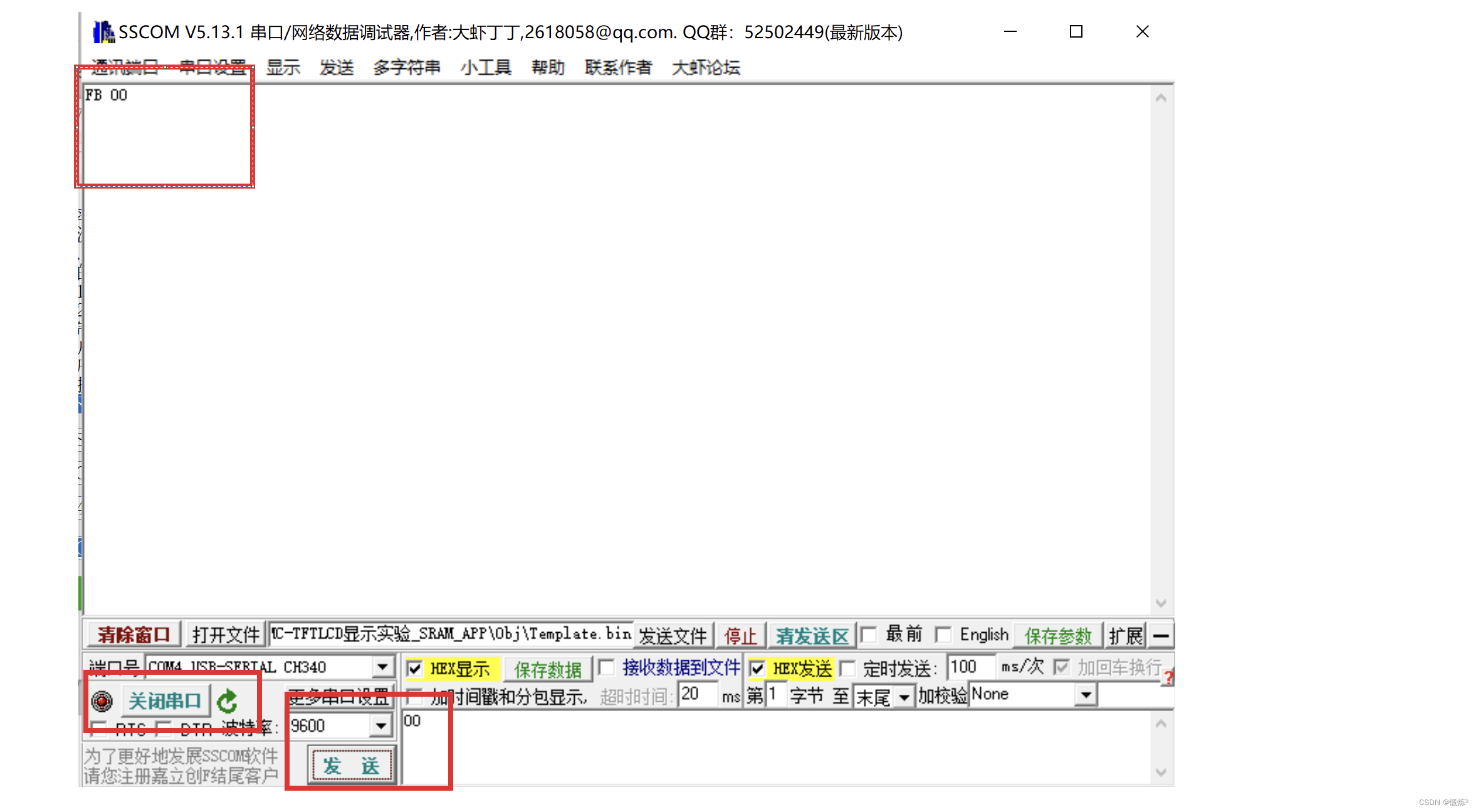
我们通过串口助手输入两个16位的数字可实现控制P2端的LED灯的亮灭
例如:FE
注意:我们使用串口助手时,
需要了解自己芯片的晶振频率:如11.0592MHZ或12MHZ
计算波特率:这里是9600
还要开启串口,才能发送数据

以上就是本期补齐的内容,欢迎参考指正,如有不懂,欢迎评论或私信出下期!!!

