
热门标签
热门文章
- 12年功能测试月薪9.5K,100多天自学自动化,跳槽涨薪4k后我的路还很长..._功能测试干两年跳槽,薪资待遇
- 2趋动VAICP技术认证全球考试正式上线
- 3Java学习笔记21——使用JDBC访问MySQL数据库_java mysql 访问
- 4测试工具Hercules_hercules setup utility
- 5GitHub入门教程_如何将文件添加到版本库
- 6Leetcode Top100题目和答案(面试必备)_leetcode题库
- 7java springboot 生成pdf 的方式有哪些_springboot生成pdf
- 8KGQA知识图谱问答资料整理(持续更新...)
- 9RocketMQ 死信消息_rocketmq如何消费异常写入死信队列
- 10kali系统卸载Docker容器_kali卸载docker
当前位置: article > 正文
Python实现——CAN报文转换工具_python cantools dump
作者:Guff_9hys | 2024-08-21 08:31:43
赞
踩
python cantools dump
一.CAN报文简介
CAN是控制器局域网络(Controller Area Network, CAN)的简称,是由以研发和生产汽车电子产品著称的德国BOSCH公司开发的,并最终成为国际标准(ISO 11898),是国际上应用最广泛的
现场总线
之一。 在北美和西欧,CAN总线
协议
已经成为
汽车计算机控制系统
和嵌入式工业控制局域网的标准总线,并且拥有以CAN为底层协议专为大型货车和重工机械车辆设计的J1939协议。
CAN总线以报文为单位进行数据传送。CAN报文按照帧格式可分为标准帧和扩展帧,标准帧是具有11位标识符的CAN帧,扩展帧是具有29位标识符的CAN帧。按照帧类型可分为:1.从发送节点向其它节点发送数据;2.远程帧:向其它节点请求发送具有同一识别符的数据帧;3.错误帧:指明已检测到总线错误;4.过载帧:过载帧用以在数据帧(或远程帧)之间提供一附加的延时。共有两种编码格式:Intel格式和Motorola格式,在编码优缺点上,Motorola格式与Intel格式并没有孰优孰劣之分,只不过根据设计者的习惯,由用户自主选择罢了。当然,对于使用者来讲,在进行解析之前,就必须要知道编码的格式是哪一种,否则,就不能保证正确地解析信号的含义。以下就以8位字节编码方式的CAN总线信号为例,详细分析一下两者之间的区别。
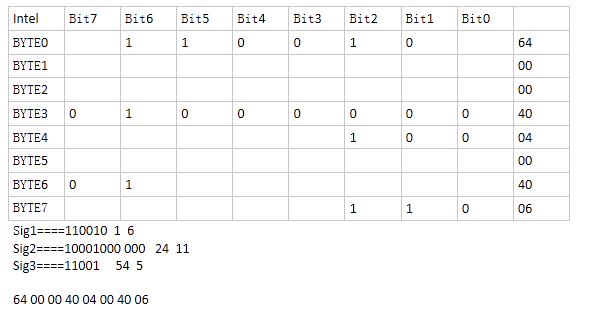
Intel编码格式
当一个信号的数据长度不超过1个字节(8位)并且信号在一个字节内实现(即该信号没有跨字节实现):该信号的高位(S_msb)将被放在该字节的高位,信号的低位(S_lsb)将被放在该字节的低位。
当一个信号的数据长度超过1个字节(8位)或者数据长度不超过一个字节但是采用跨字节方式实现时:该信号的高位(S_msb)将被放在高字节(MSB)的高位,信号的低位(S_lsb)将被放在低字节(LSB)的低位。
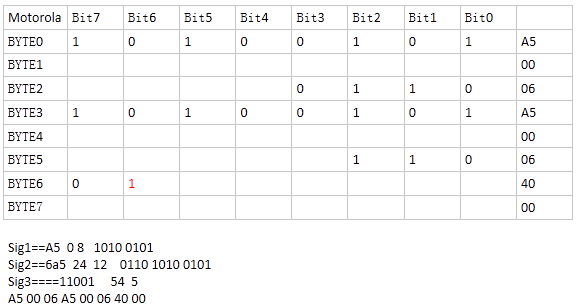
Motorola编码格式
当一个信号的数据长度不超过1个字节(8位)并且信号在一个字节内实现(即该信号没有跨字节实现):该信号的高位(S_msb)将被放在该字节的高位,信号的低位(S_lsb)将被放在该字节的低位。
当一个信号的数据长度超过1个字节(8位)或者数据长度不超过一个字节但是采用跨字节方式实现时:该信号的高位(S_msb)将被放在低字节(MSB)的高位,信号的低位(S_lsb)将被放在高字节(LSB)的低位。
可以看出,当一个信号的数据长度不超过1Byte时,Intel与Motorola两种格式的编码结果没有什么不同,完全一样。当信号的数据长度超过1Byte时,两者的编码结果出现了明显的不同。
二.CAN报文转换工具需求分析
1、 支持标准帧的CAN报文的转换,扩展帧暂不支持
2、 CAN报文支持Intel、motorola两种编码,先支持motorola格式,后期追加Intel格式
3、 工具具有一定的容错处理能力、报告生成能力
4、 制定统一格式,方便使用者修改测试脚本
2、 CAN报文支持Intel、motorola两种编码,先支持motorola格式,后期追加Intel格式
3、 工具具有一定的容错处理能力、报告生成能力
4、 制定统一格式,方便使用者修改测试脚本
5、增加交互模式,键盘输入,控制台输出;例如:
提示语:startBit:length:minValue:maxValue:setValue
输入:35:1:0:1:1
或:35:1:::1
控制台输出:00 00 00 00 08 00 00 00
Intel和Motorola编码举例:
提示语:startBit:length:minValue:maxValue:setValue
输入:35:1:0:1:1
或:35:1:::1
控制台输出:00 00 00 00 08 00 00 00
Intel和Motorola编码举例:
三.交互模式
代码如下:
- import sys
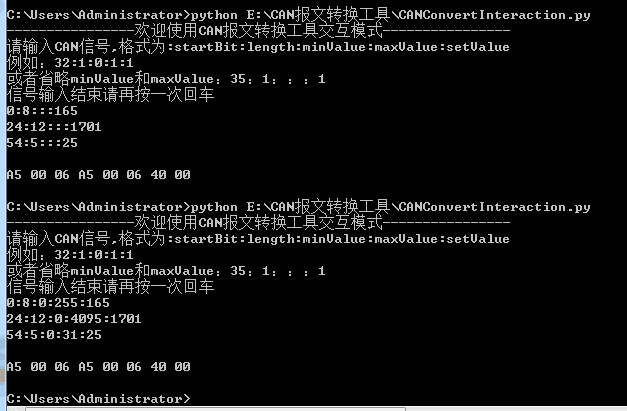
- print("----------------欢迎使用CAN报文转换工具交互模式----------------")
- print("请输入CAN信号,格式为:startBit:length:minValue:maxValue:setValue")
- print("例如:32:1:0:1:1")
- print("或者省略minValue和maxValue:35:1:::1")
- print("信号输入结束请再按一次回车")
-
- #十进制转换成二进制list
- def octToBin(octNum, bit):
- while(octNum != 0):
- bit.append(octNum%2)
- octNum = int(octNum/2)
- for i in range(64-len(bit)):
- bit.append(0)
-
- sig = []
- startBit = []
- length = []
- setValue = []
- #输入CAN信号
- while True:
- input_str = input()
- if not len(input_str):
- break
- if(input_str.count(":")<4):
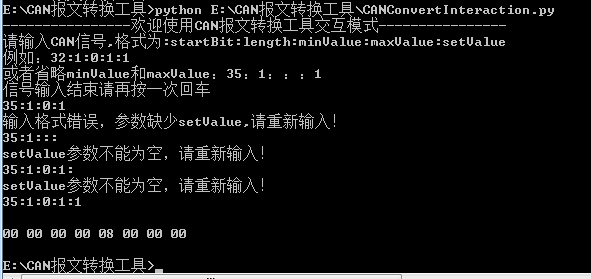
- print("输入格式错误,参数缺少setValue,请重新输入!")
- continue
- if(input_str.split(":")[4]==""):
- print("setValue参数不能为空,请重新输入!")
- continue
- sig.append(input_str)
- #解析CAN信号
- for i in range(len(sig)):
- startBit.append(int(sig[i].split(":")[0]))
- length.append(int(sig[i].split(":")[1]))
- setValue.append(int(sig[i].split(":")[4]))
- #CAN数组存放CAN报文值
- CAN = []
- for i in range(64):
- CAN.append(-1)
- for i in range(len(startBit)):
- #长度超过1Byte的情况,暂不支持
- if(length[i]>16):
- print("CAN信号长度超过2Byte,暂不支持!!!")
- sys.stdin.readline()
- sys.exit()
- #长度未超过1Byte的情况且未跨字节的信号
- if((startBit[i]%8 + length[i])<=8):
- for j in range(length[i]):
- bit = []
- #setValue的二进制值按字节位从低到高填
- octToBin(setValue[i],bit)
- #填满字节长度值
- if(CAN[startBit[i]+j]==-1):
- CAN[startBit[i]+j] = bit[j]
- #字节存在冲突
- else:
- print(sig[i] + "字节位存在冲突,生成CAN报文失败!!!")
- sys.stdin.readline()
- sys.exit()
- #跨字节的信号
- else:
- #高位位数和低位位数
- highLen = 8 - startBit[i]%8
- lowLen = length[i] - highLen
- bit = []
- #setValue的二进制值按字节位从低到高填
- octToBin(setValue[i],bit)
- #先填进信号的高位
- for j1 in range(highLen):
- if(CAN[startBit[i]+j1]==-1):
- CAN[startBit[i]+j1] = bit[j1]
- #字节存在冲突
- else:
- print(sig[i] + "字节位存在冲突,生成CAN报文失败!!!")
- sys.stdin.readline()
- sys.exit()
- #再填进信号的低位
- for j2 in range(lowLen):
- if(CAN[(int(startBit[i]/8)-1)*8+j2]==-1):
- CAN[(int(startBit[i]/8)-1)*8+j2] = bit[highLen+j2]
- #字节存在冲突
- else:
- print(sig[i] + "字节位存在冲突,生成CAN报文失败!!!")
- sys.stdin.readline()
- sys.exit()
- #剩余位默认值设为0
- for i in range(64):
- if(CAN[i]==-1):
- CAN[i] = 0
- #----------------将二进制list每隔8位转换成十六进制输出----------------
- #其中,map()将list中的数字转成字符串,按照Motorola格式每隔8位采用了逆序
- # ''.join()将二进制list转换成二进制字符串,int()将二进制字符串转换成十进制
- #hex()再将十进制转换成十六进制,upper()转换成大写,两个lstrip()将"0X"删除,
- #zfill()填充两位,输出不换行,以空格分隔
- print(hex(int(''.join(map(str,CAN[7::-1])),2)).upper().lstrip("0").lstrip("X").zfill(2) + " ",end="")
- print(hex(int(''.join(map(str,CAN[15:7:-1])),2)).upper().lstrip("0").lstrip("X").zfill(2) + " ",end="")
- print(hex(int(''.join(map(str,CAN[23:15:-1])),2)).upper().lstrip("0").lstrip("X").zfill(2) + " ",end="")
- print(hex(int(''.join(map(str,CAN[31:23:-1])),2)).upper().lstrip("0").lstrip("X").zfill(2) + " ",end="")
- print(hex(int(''.join(map(str,CAN[39:31:-1])),2)).upper().lstrip("0").lstrip("X").zfill(2) + " ",end="")
- print(hex(int(''.join(map(str,CAN[47:39:-1])),2)).upper().lstrip("0").lstrip("X").zfill(2) + " ",end="")
- print(hex(int(''.join(map(str,CAN[55:47:-1])),2)).upper().lstrip("0").lstrip("X").zfill(2) + " ",end="")
- print(hex(int(''.join(map(str,CAN[63:55:-1])),2)).upper().lstrip("0").lstrip("X").zfill(2))
-
-

错误提示:
四.配置项模式
配置文件如下:
- #!/usr/bin/python
- defaultValue = 0
- sigName = []
- startBit = []
- length = []
- minValue = []
- maxValue = []
- setValue = []
- #CAN数组存放CAN报文值
- CAN = []
- logFile = open("log.txt","w")
- def parseConfig():
- config = open("Config.txt","r")
-
- count = 0
- isError = False
- for line in config:
- line = line.strip()
- #注释
- if(line.find("#")>=0):
- continue
- #开始标记
- elif(line.find("::start")>=0):
- count = count + 1
- isError = False
- if(count>1):
- sigName.clear()
- startBit.clear()
- length.clear()
- setValue.clear()
- continue
- else:
- continue
- elif(isError == True):
- continue
- #编码格式
- elif(line.find("encodeType")>=0):
- encodeType = line.split("=")[1]
- if(encodeType != "1"):
- isError = True
- print(str(count) + ". CAN报文生成失败!!!目前仅支持Motorola编码格式,暂不支持Intel编码格式!")
- logFile.write("%d. CAN报文生成失败!!!目前仅支持Motorola编码格式,暂不支持Intel编码格式!\n" % count)
- continue
- #帧格式
- elif(line.find("canMode")>=0):
- canMode = line.split("=")[1]
- if(canMode != "0"):
- isError = True
- print(str(count) + ". CAN报文生成失败!!!目前仅支持标准帧,暂不支持扩展帧!")
- logFile.write("%d. CAN报文生成失败!!!目前仅支持标准帧,暂不支持扩展帧!\n" % count)
- continue
- #帧类型
- elif(line.find("canType")>=0):
- canType = line.split("=")[1]
- if(canType != "0"):
- isError = True
- print(str(count) + ". CAN报文生成失败!!!目前仅支持数据帧,暂不支持其他帧!")
- logFile.write("%d. CAN报文生成失败!!!目前仅支持数据帧,暂不支持其他帧!\n" % count)
- continue
- #默认初始值
- elif(line.find("defaultValue")>=0):
- global defaultValue
- defaultValue = int(line.split("=")[1])
- #MSG名称
- elif(line.find("msgName")>=0):
- msgName = line.split("=")[1]
- #MSGID
- elif(line.find("msgID")>=0):
- msgID = line.split("=")[1]
- #MSG长度
- elif(line.find("msgLength")>=0):
- msgLength = line.split("=")[1]
- #signal定义
- elif(line.find("sigName")>=0):
- sigName.append(line.split(":")[0].split("=")[1])
- startBit.append(int(line.split(":")[1]))
- length.append(int(line.split(":")[2]))
- #minValue.append(int(line.split(":")[3]))
- #maxValue.append(int(line.split(":")[4]))
- setValue.append(int(line.split(":")[5]))
- elif(line.find("::end")>=0):
-
- rV,errMsg = getCANMessage()
- if(rV == "-1"):
- isError = True
- print(str(count) + ". CAN报文生成失败!!!" + errMsg)
- logFile.write("%d. CAN报文生成失败!!!%s\n" % (count,errMsg))
- continue
-
- print(str(count) + ". CAN报文生成成功!!!")
- logFile.write("%d. CAN报文生成成功!!!\n" % count)
- #----------------------------输出标题信息----------------------------
- print("msgName\t\tmsgID\t\tmsgLen\t\tmsgData")
- logFile.write("msgName\t\tmsgID\t\tmsgLen\t\tmsgData\n")
- if(len(msgName)<8):
- print(msgName + "\t\t",end="")
- logFile.write("%s\t\t" % msgName)
- else:
- print(msgName + "\t",end="")
- logFile.write("%s\t" % msgName)
- print(msgID + "\t\t",end="")
- logFile.write("%s\t\t" % msgID)
- print(msgLength + "\t\t",end="")
- logFile.write("%s\t\t" % msgLength)
- #----------------将二进制list每隔8位转换成十六进制输出----------------
- #其中,map()将list中的数字转成字符串,按照Motorola格式每隔8位采用了逆序
- # ''.join()将二进制list转换成二进制字符串,int()将二进制字符串转换成十进制
- #hex()再将十进制转换成十六进制,upper()转换成大写,两个lstrip()将"0X"删除,
- #zfill()填充两位,输出不换行,以空格分隔
- print(hex(int(''.join(map(str,CAN[7::-1])),2)).upper().lstrip("0").lstrip("X").zfill(2) + " ",end="")
- print(hex(int(''.join(map(str,CAN[15:7:-1])),2)).upper().lstrip("0").lstrip("X").zfill(2) + " ",end="")
- print(hex(int(''.join(map(str,CAN[23:15:-1])),2)).upper().lstrip("0").lstrip("X").zfill(2) + " ",end="")
- print(hex(int(''.join(map(str,CAN[31:23:-1])),2)).upper().lstrip("0").lstrip("X").zfill(2) + " ",end="")
- print(hex(int(''.join(map(str,CAN[39:31:-1])),2)).upper().lstrip("0").lstrip("X").zfill(2) + " ",end="")
- print(hex(int(''.join(map(str,CAN[47:39:-1])),2)).upper().lstrip("0").lstrip("X").zfill(2) + " ",end="")
- print(hex(int(''.join(map(str,CAN[55:47:-1])),2)).upper().lstrip("0").lstrip("X").zfill(2) + " ",end="")
- print(hex(int(''.join(map(str,CAN[63:55:-1])),2)).upper().lstrip("0").lstrip("X").zfill(2))
- logFile.write("%s " % hex(int(''.join(map(str,CAN[7::-1])),2)).upper().lstrip("0").lstrip("X").zfill(2))
- logFile.write("%s " % hex(int(''.join(map(str,CAN[15:7:-1])),2)).upper().lstrip("0").lstrip("X").zfill(2))
- logFile.write("%s " % hex(int(''.join(map(str,CAN[23:15:-1])),2)).upper().lstrip("0").lstrip("X").zfill(2))
- logFile.write("%s " % hex(int(''.join(map(str,CAN[31:23:-1])),2)).upper().lstrip("0").lstrip("X").zfill(2))
- logFile.write("%s " % hex(int(''.join(map(str,CAN[39:31:-1])),2)).upper().lstrip("0").lstrip("X").zfill(2))
- logFile.write("%s " % hex(int(''.join(map(str,CAN[47:39:-1])),2)).upper().lstrip("0").lstrip("X").zfill(2))
- logFile.write("%s " % hex(int(''.join(map(str,CAN[55:47:-1])),2)).upper().lstrip("0").lstrip("X").zfill(2))
- logFile.write("%s\n" % hex(int(''.join(map(str,CAN[63:55:-1])),2)).upper().lstrip("0").lstrip("X").zfill(2))
-
- config.close()
-
- #十进制转换成二进制list
- def octToBin(octNum, bit):
- while(octNum != 0):
- bit.append(octNum%2)
- octNum = int(octNum/2)
- for i in range(64-len(bit)):
- bit.append(0)
-
- #获取CAN报文值
- def getCANMessage():
- CAN.clear()
- for i in range(64):
- CAN.append(-1)
- for i in range(len(startBit)):
- #长度超过1Byte的情况,暂不支持
- if(length[i]>16):
- errMsg = " CAN信号长度超过2Byte,暂不支持!!!"
- #print(sigName[i] + errMsg)
- return "-1",errMsg
- #长度未超过1Byte的情况且未跨字节的信号
- if((startBit[i]%8 + length[i])<=8):
- for j in range(length[i]):
- bit = []
- #setValue的二进制值按字节位从低到高填
- octToBin(setValue[i],bit)
- #填满字节长度值
- if(CAN[startBit[i]+j]==-1):
- CAN[startBit[i]+j] = bit[j]
- #字节存在冲突
- else:
- errMsg = " 字节位存在冲突,生成CAN报文失败!!!"
- #print(sigName[i] + errMsg)
- return "-1",errMsg
- #跨字节的信号
- else:
- #高位位数和低位位数
- highLen = 8 - startBit[i]%8
- lowLen = length[i] - highLen
- bit = []
- #setValue的二进制值按字节位从低到高填
- octToBin(setValue[i],bit)
- #先填进信号的高位
- for j1 in range(highLen):
- if(CAN[startBit[i]+j1]==-1):
- CAN[startBit[i]+j1] = bit[j1]
- #字节存在冲突
- else:
- errMsg = " 字节位存在冲突,生成CAN报文失败!!!"
- #print(sigName[i] + errMsg)
- return "-1",errMsg
- #再填进信号的低位
- for j2 in range(lowLen):
- if(CAN[(int(startBit[i]/8)-1)*8+j2]==-1):
- CAN[(int(startBit[i]/8)-1)*8+j2] = bit[highLen+j2]
- #字节存在冲突
- else:
- errMsg = " 字节位存在冲突,生成CAN报文失败!!!"
- #print(sigName[i] + errMsg)
- return "-1",errMsg
- #剩余位设为默认值
- for i in range(64):
- if(CAN[i]==-1):
- CAN[i] = defaultValue
-
- #若无错误则返回正确值
- return "0","success!"
-
- if __name__ == "__main__":
- #调用parseConfig()函数开始执行程序
- parseConfig()
运行结果:
- 1. CAN报文生成成功!!!
- msgName msgID msgLen msgData
- BCM_FrP01 0x2CD 8 A5 00 06 A5 00 06 40 00
- 2. CAN报文生成成功!!!
- msgName msgID msgLen msgData
- BCM_FrP 0x2CD 8 00 00 00 00 08 00 00 00
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/Guff_9hys/article/detail/1011011
推荐阅读

相关标签

