
热门标签
热门文章
- 1【Centos7的Zookeeper分布式集群】
- 2Qt开发笔记:Qt3D三维开发笔记(一):Qt3D三维开发基础概念介绍_使用qt做3维图形显示需要什么技术
- 3el-table 定制表头下拉选项_table 表头下拉框
- 4Python闭包详解_python闭包函数详解
- 5pyqt5 GUI应用程序多线程(thread)执行多个功能的示例代码_pythongui多线程
- 6深入解析 Vue.js 项目的启动奥秘:npm run dev 与 npm run serve_vue启动脚本
- 7VDA5050协议介绍 和 详细翻译
- 8AI新工具 MacOS 翻译提供翻译、润色和语法修改功能的插件;AI生成 Excel公式;Deepmind前华人员工创建视频生成工具_macos有哪些客户端软件自带ai视频生成及剪辑
- 9[嵌入式AI从0开始到入土]12_yolov5在昇腾上应用_yolov5 昇腾
- 10Encoder-Decoder架构
当前位置: article > 正文
Real Time Data Exchange (RTDE)Guide for 优傲机器人
作者:Guff_9hys | 2024-07-22 11:39:41
赞
踩
rtde

实时数据交换 (
RTDE
) 接口提供了一种通过标准
TCP/IP
将外部应用与 优傲机器人UR 控制器同步,且不会破坏 优傲机器人UR 控制器的任何实时属性的
方法。此功能对于与现场总线驱动器(例如以太网
/ IP
)交互,操
作机器人
I / O和绘制优傲机器人状态(例如机器人轨迹)非常有用。默
认情况下,
RTDE 接口在 优傲机器人UR 控制器运行时可用。
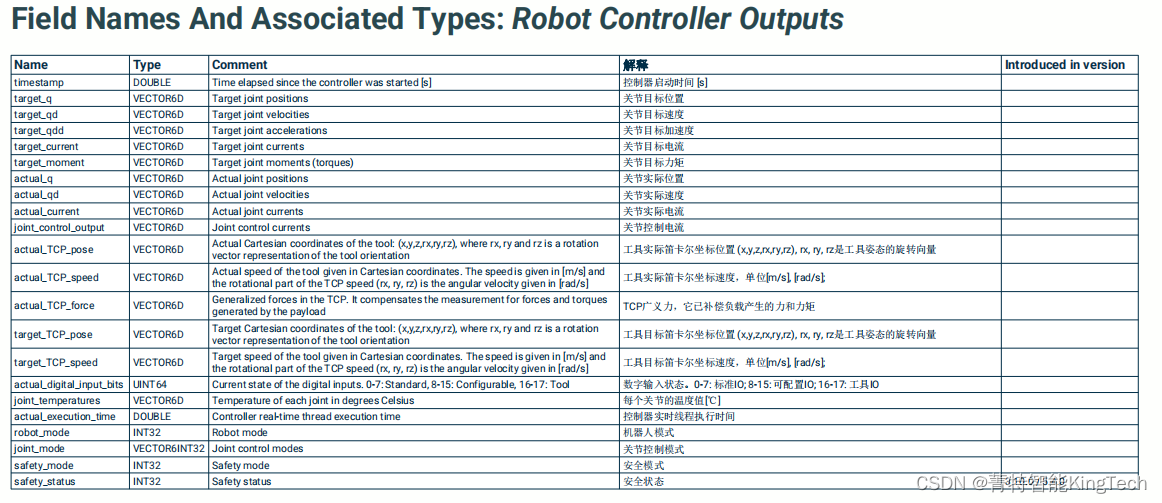
RTDE
功能是可配置的,例如可同步以下数据:
•
输出:
机器人、关节、工具和安全状态、模拟和数字
I/O
以及
通用输出寄存器
•
输入:
数字和模拟输出以及通用输入寄存器
RTDE
功能的实现分为两个阶段:配置阶段和同步阶段。

连接到
RTDE
接口时,客户端负责设置要同步的变量。其需要写入
/
读取的输入
/
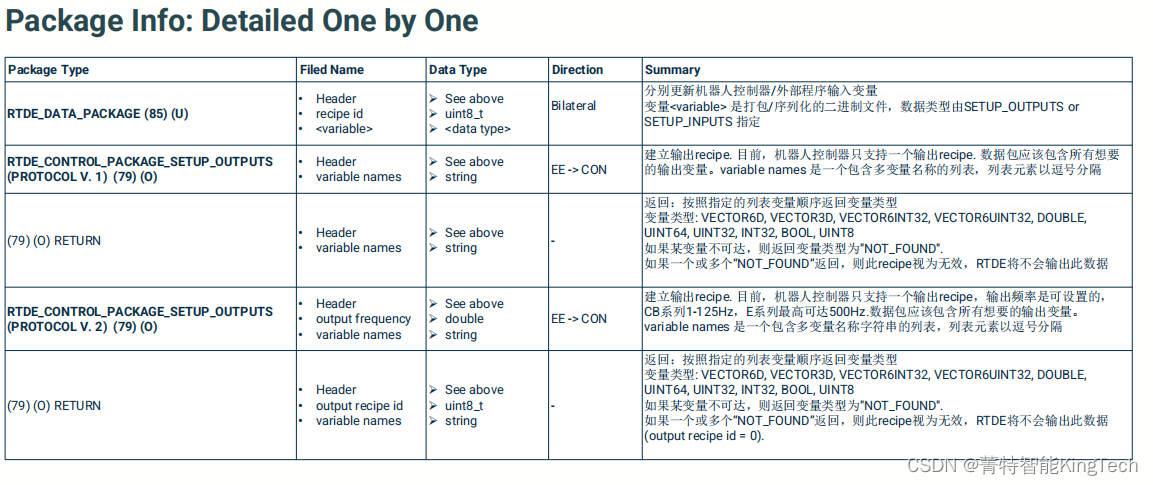
输出寄存器可以分别指定。为此,客户端会发送一个
包含同步输入输出字段的列表,这些输入输出将包含在实际的同步
数据包中。
同步数据包格式的定义称为配方
recipe
。配方在最大限制为
2048
字节的数据中,定义客户端要订阅的输入
/
输出字段名称列表。之
后,
RTDE
接口以变量类型列表进行回复,或指出未找到特定变量。
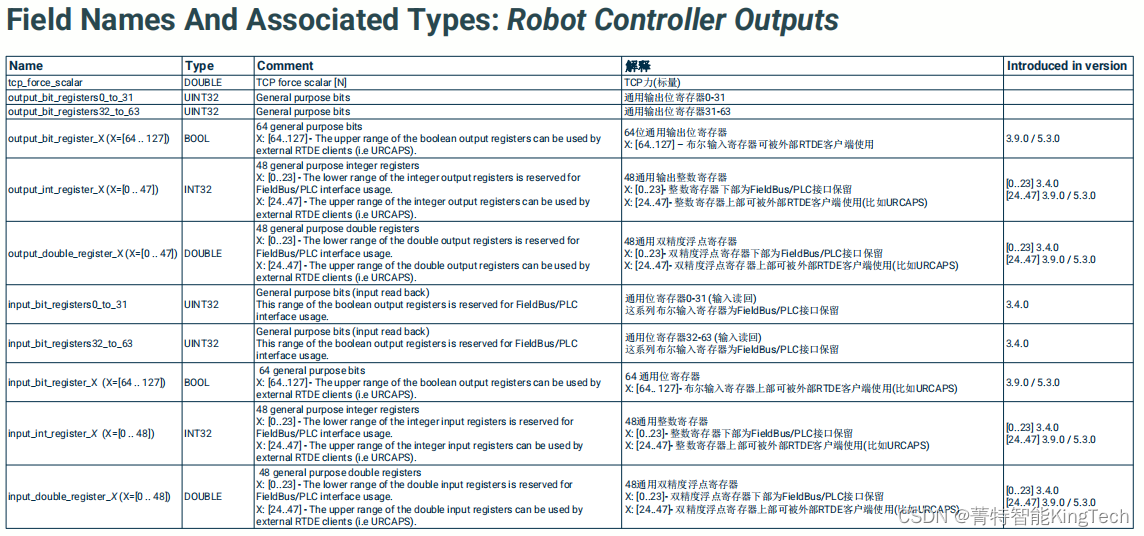
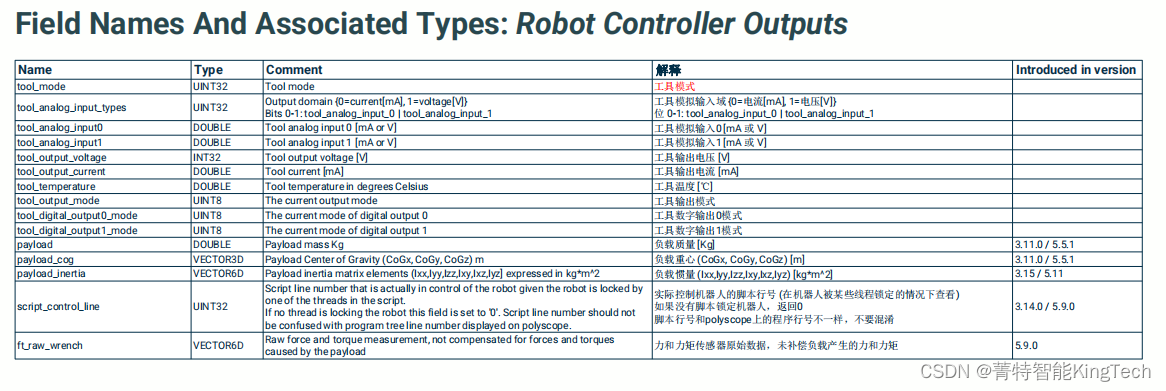
每个已成功配置的输入配方都将获得唯一的
recipe ID
。
RTDE
支持
的字段名称及其关联数据类型的列表见下文。
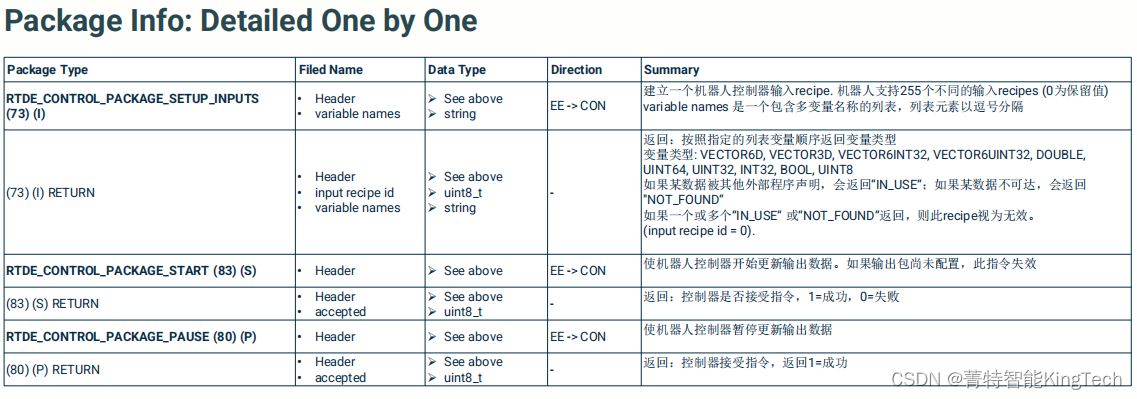
设置完成后,数据同步可以适时启动和暂停。

当同步循环启动时,
RTDE
接口将按照客户端请求的顺序向其发送
数据。此外,客户端应在更改值时向
RTDE
接口发送更新的输入。
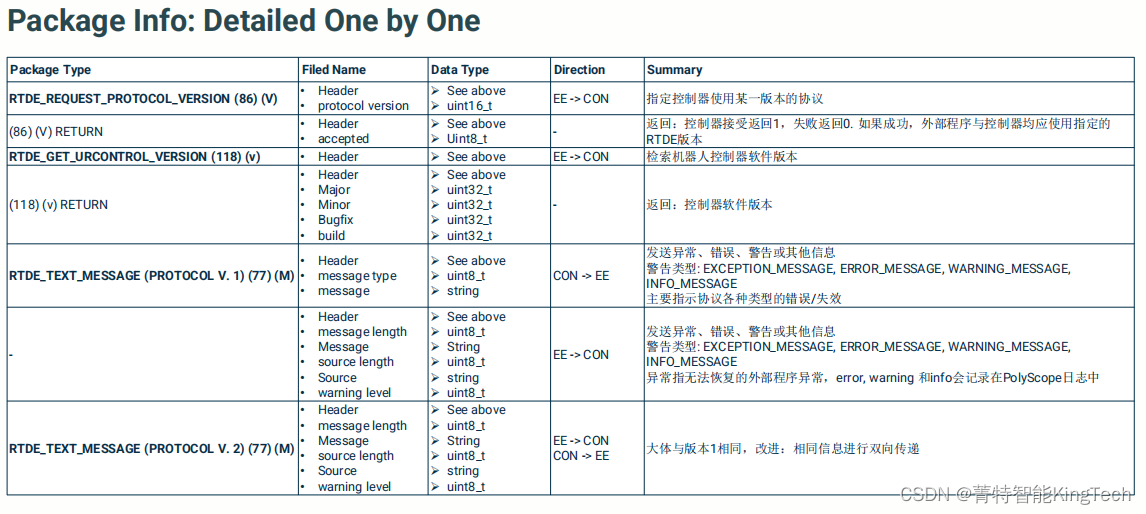
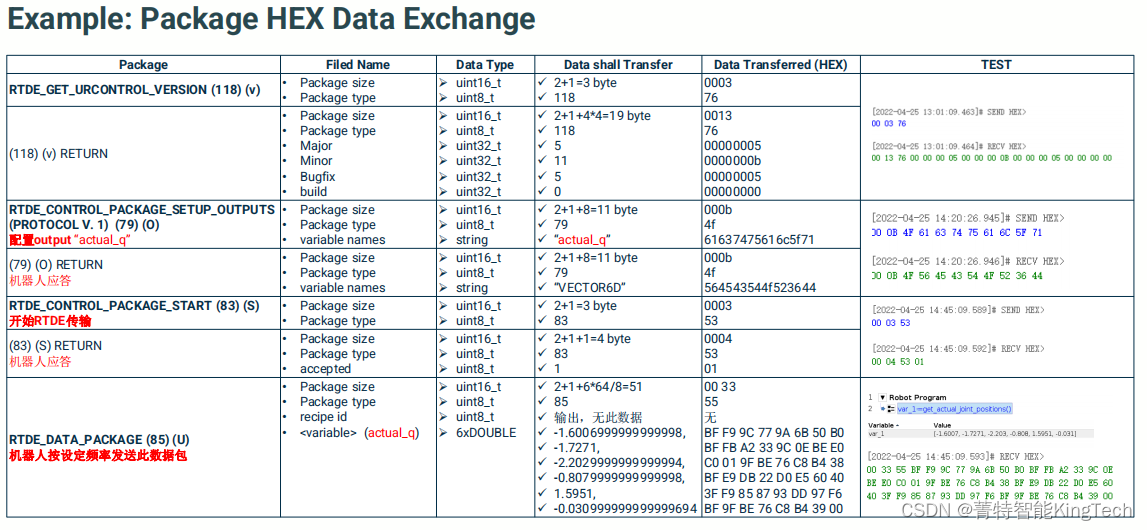
数据同步使用序列化的二进制数据。
所有数据包都 有相同的一般结构:带有标头和有效负载(如果适
用)。用于安装过程的包将生成一条返回消息,同步循环包则不然。
客户端和服务器都可以随时发送文本消息,警告级别标识问题的严
重性。
RTDE
在端口号
30004
上可用。
作为初次使用者,建议使用或修改本指南提供的用
Python
编写的
客户端示例。

实时同步:
RTDE
通常以
125 Hz
的频率生成输出消息。但控制
器中的实时环路比
RTDE
接口的优先级更高。因此,如果控制器
缺少计算资源,它将跳过一些输出包。跳过的包不会重新发送,
控制器将始终发送最新的数据。输入包将始终在接收到的控制
周期内进行处理,因此控制器的负载将根据接收的包的数量而
变化。
•
输入消息:
控制器中变量的更新可以分为多个消息。可以有一
条消息来更新所有内容,也可以有一条消息来更新一个变量,
或任何对应关系。不需要恒定的更新速率;输入值保持其上次
接收的值。注: 控制器中的每个特定变量在任何时候都只允许
被一个
RTDE
客户端控制。
运行时环境
:
RTDE
客户端可以在
UR
控制器
PC
或任何外部
PC
上运行。在控制盒上运行
RTDE
客户端的优点是没有网络延
迟。但
RTDE
客户端会和
UR
控制器抢计算资源。请确保
RTDE
客户端以标准操作系统优先级运行。一些计算密集型过程,例
如图像处理,应在外部
PC
上运行。
•
协议更改:优傲机器人UR 可能随时更新
RTDE
协议。为了保证
RTDE
客户
端的最大兼容性,
RTDE
客户端可以请求
RTDE
接口提供特定
的协议版本。协议添加
/
更改会被明确标识,否则假定为版本
1
。










来源:Tide Zheng
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/Guff_9hys/article/detail/864989
推荐阅读
相关标签

