
热门标签
热门文章
- 1设置hive的执行引擎_0506如何将Hue4.0版本中默认执行引擎设置为Hive而非Impala
- 2高校导师在微信群里公然委托关照考研复试,学校通报处理情况!
- 3腾讯AniPortrait开源:音频合成逼真人脸动画,对标阿里EMO_腾讯aniportrait 模型下载
- 4stable diffusion常用的模型_stable diffusion 常用模型
- 5基于Kafka+Flink+Redis的电商大屏实时计算案例
- 6前端自动化测试(二)Vue Test Utils + Jest_vue+jest 测试api
- 7【前端】从零开始学习编写HTML
- 820240624 每日AI必读资讯
- 9数据结构之冒泡排序图文详解及代码(C++实现)_c++冒泡算法代码
- 10Dagger2 在 Android SystemUI 中的应用_android systemui11 dagger2
当前位置: article > 正文
自动驾驶AVM环视算法--任意角度的旋转算法实现_环视源码
作者:Guff_9hys | 2024-07-23 11:22:01
赞
踩
环视源码
测试环境
opencv310
vs2022
参考:金书世界
算法源码获取:
链接:https://pan.baidu.com/s/1YLE-uM1JaHCMqDndPfU01Q 提取码:m7rc
算法的主要实现
1、实现三个坐标轴轴的旋转。
2、不同相机之间的拼接融合。
测试的输出效果图像
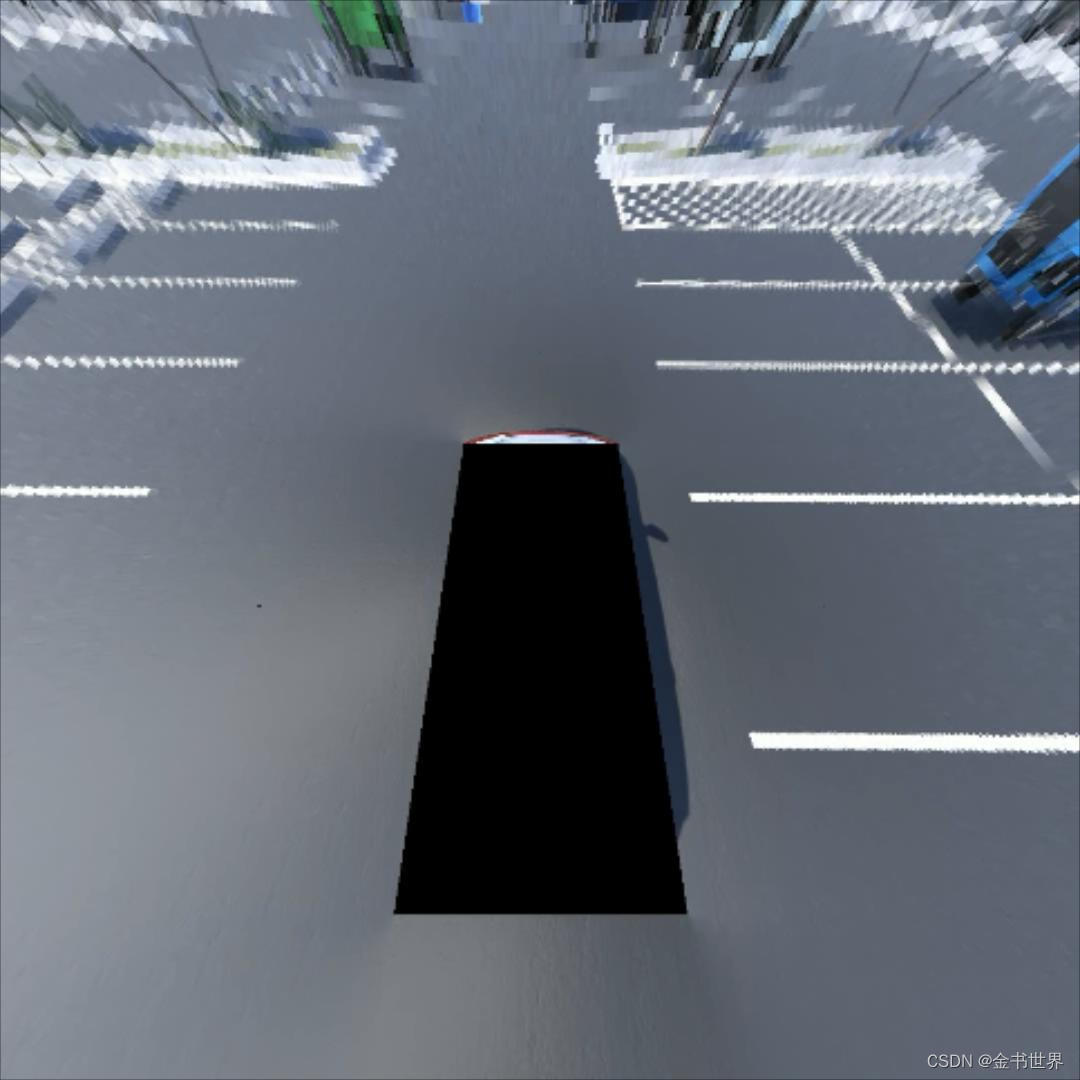
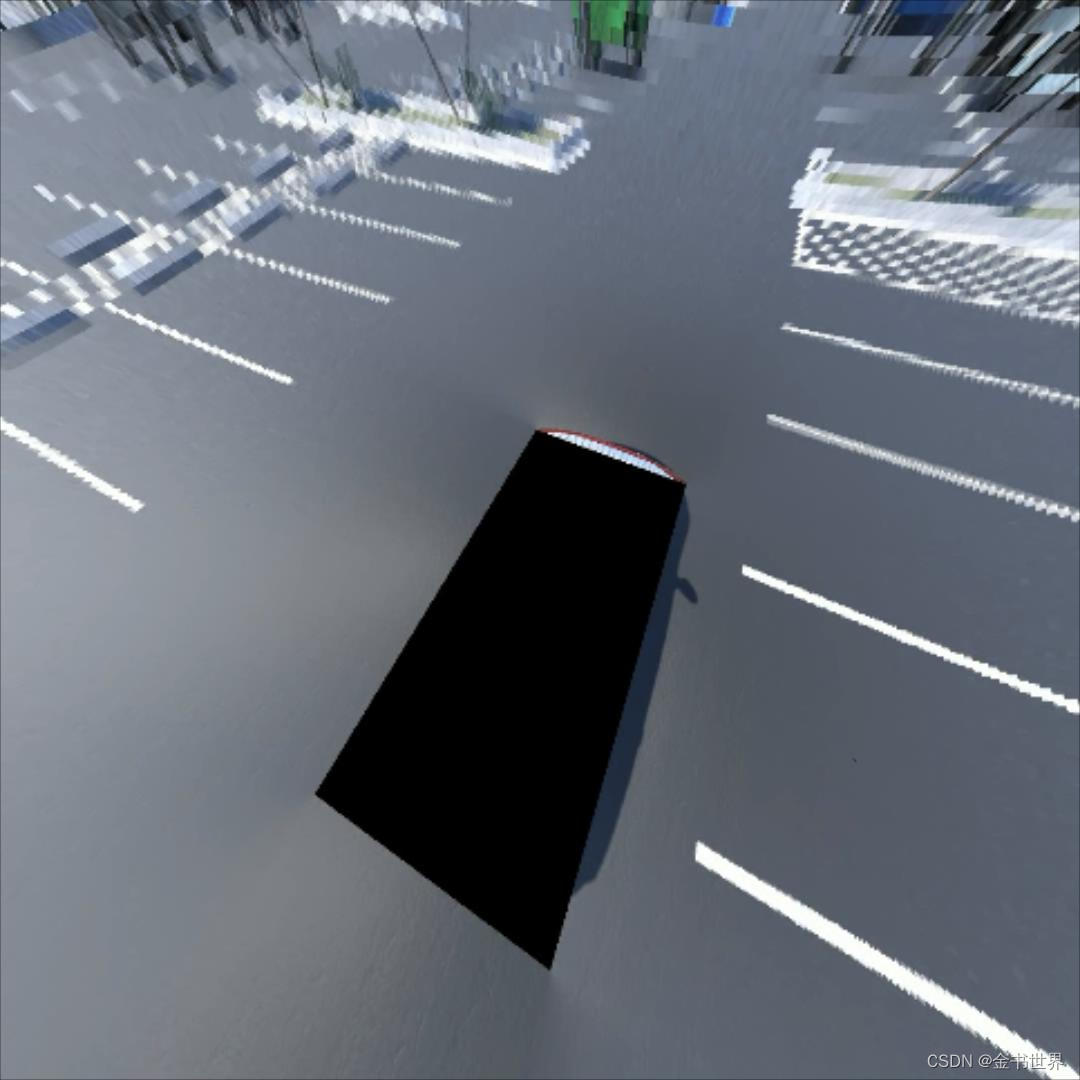
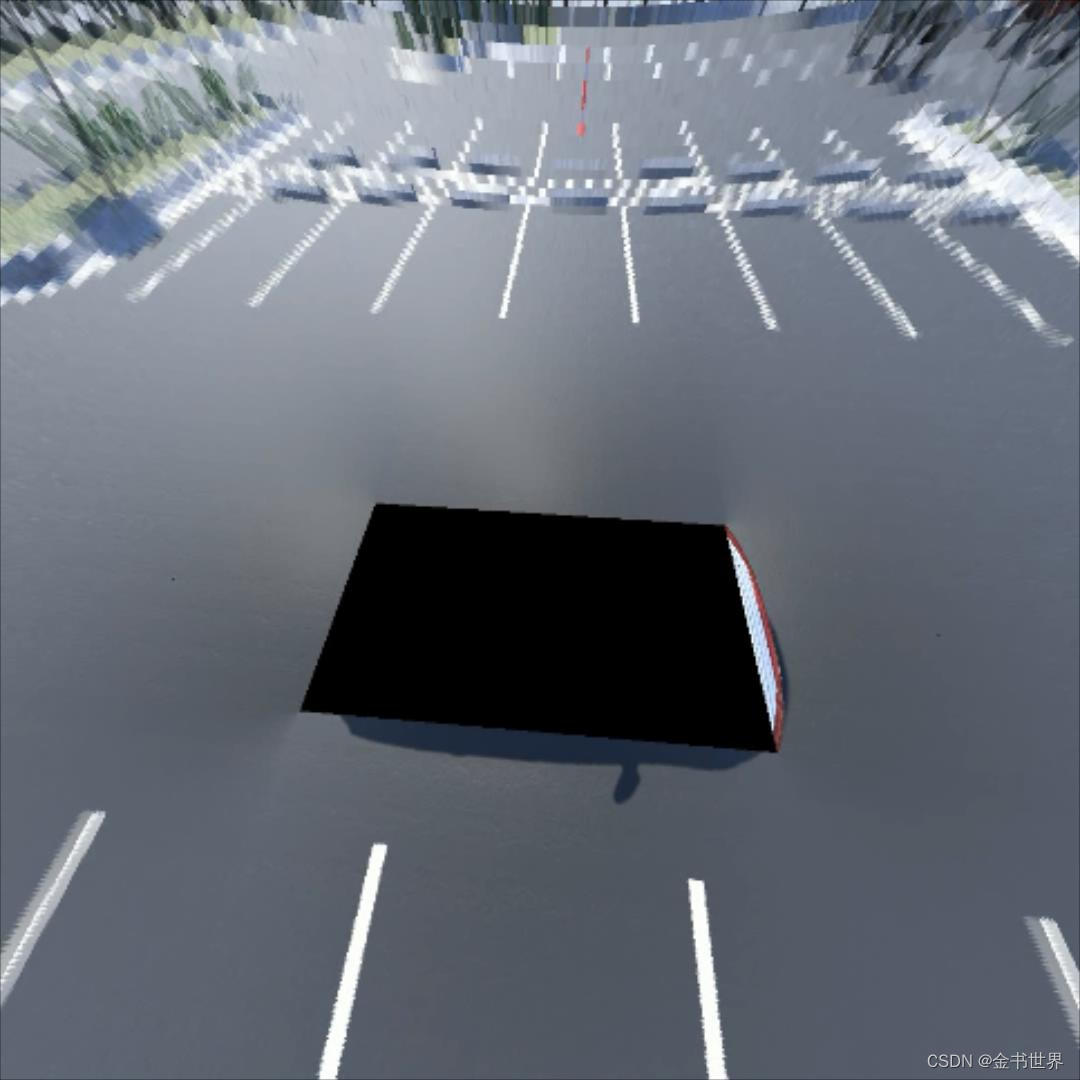
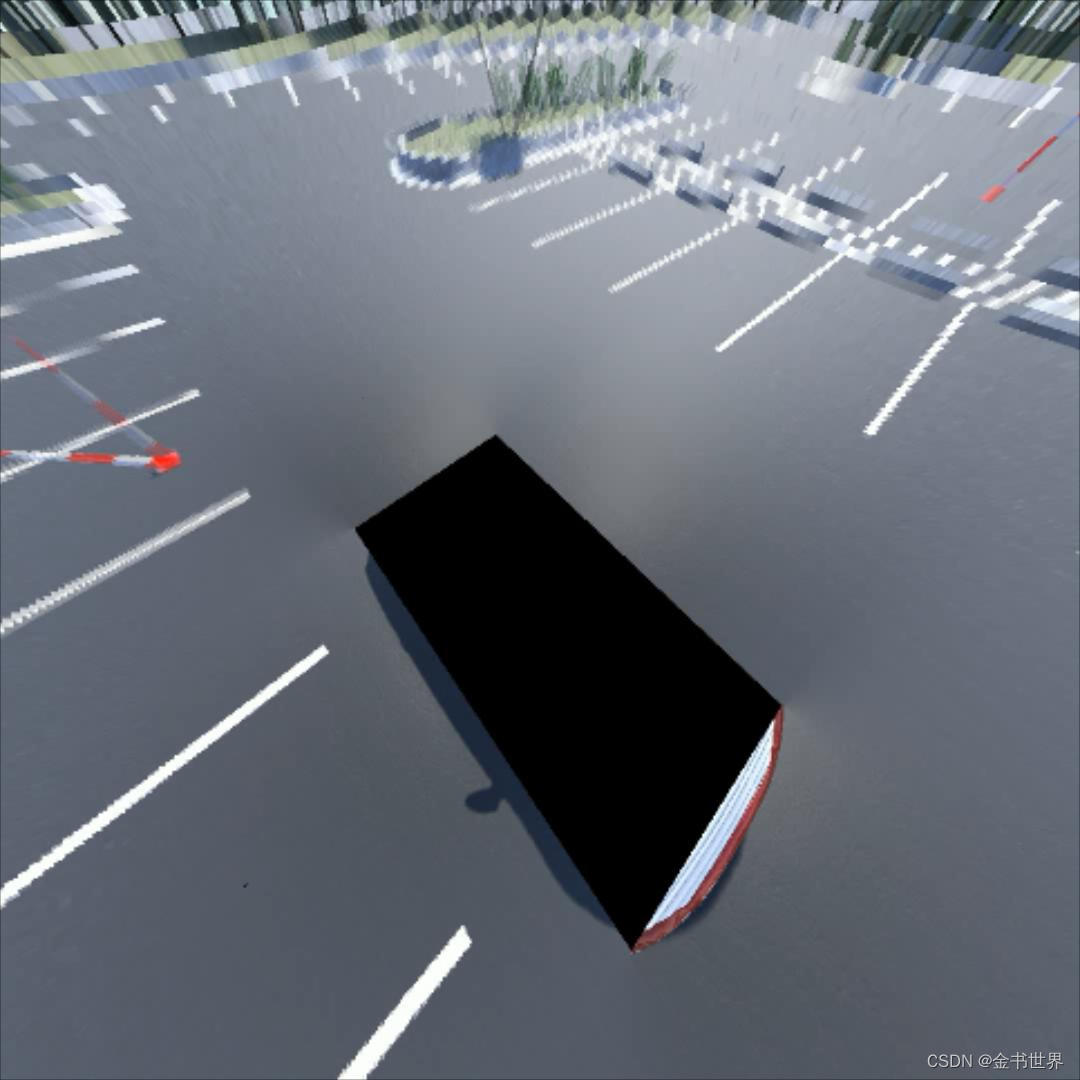
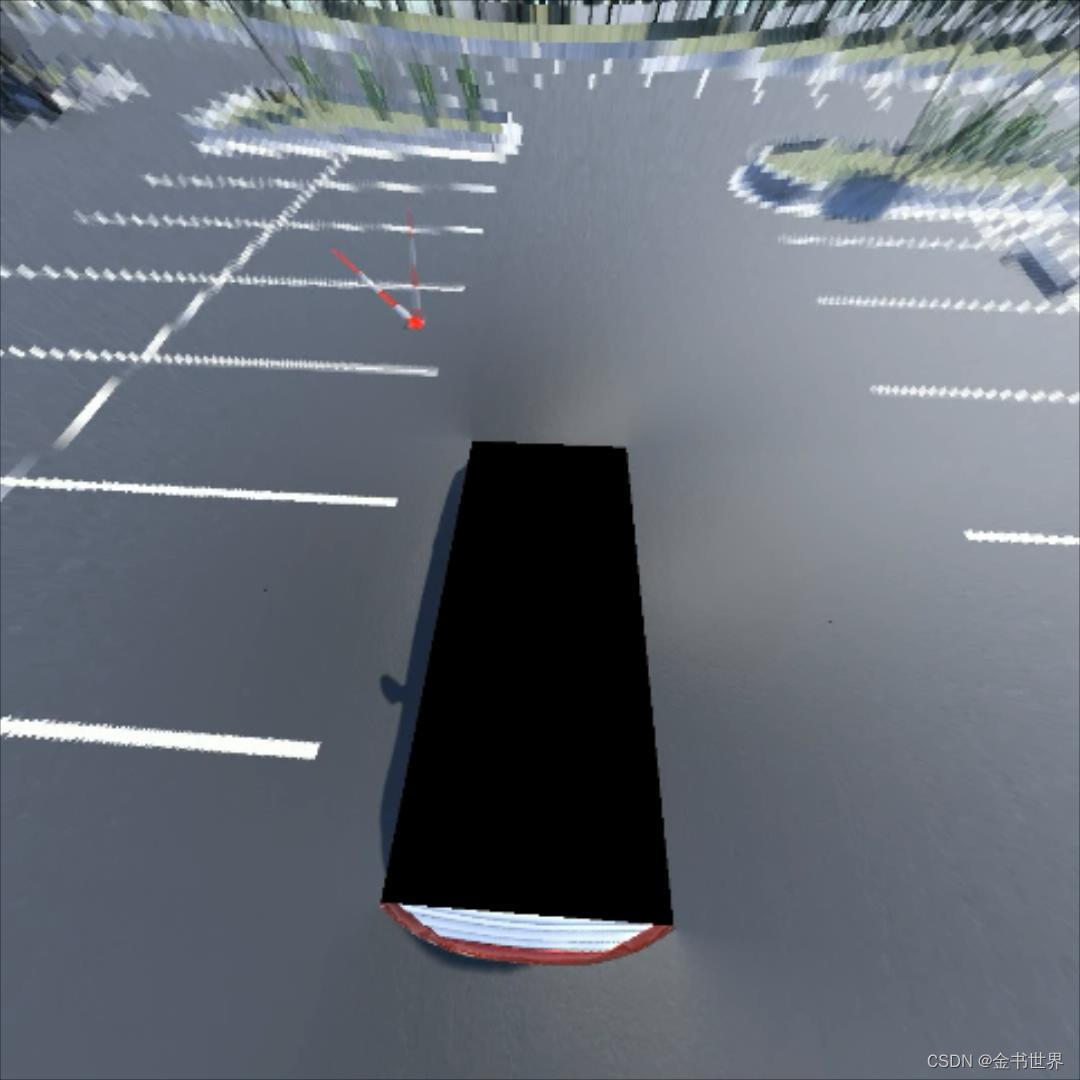
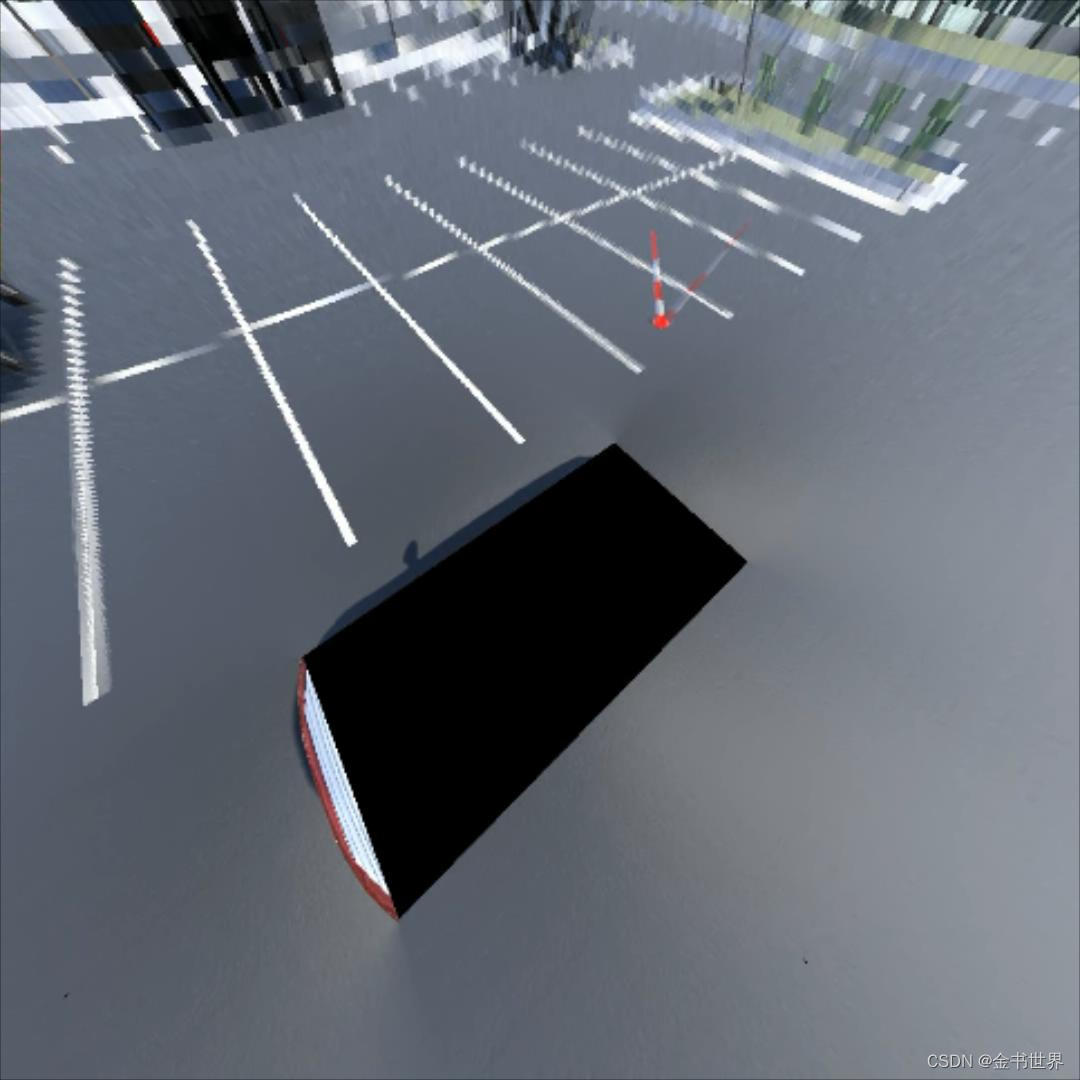
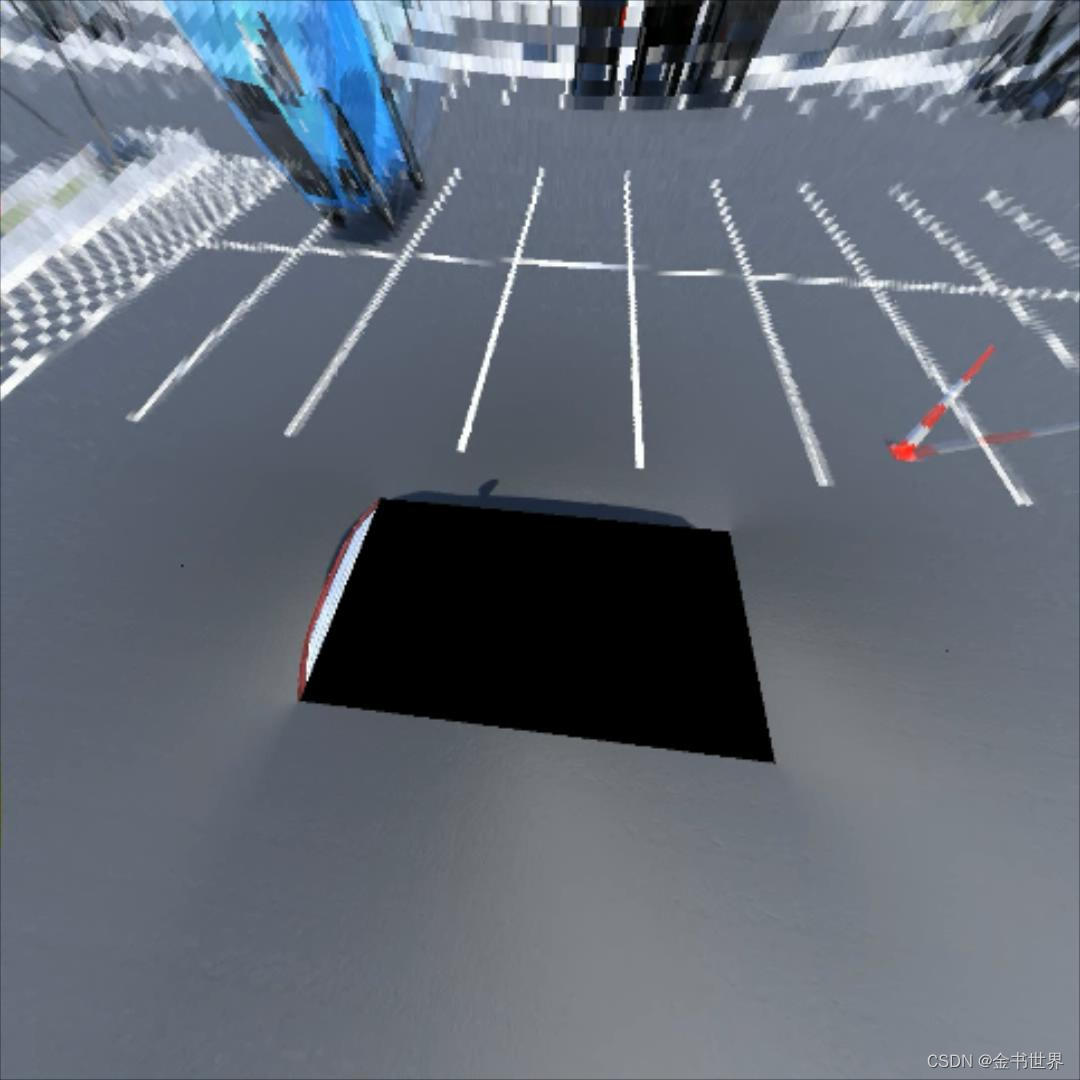
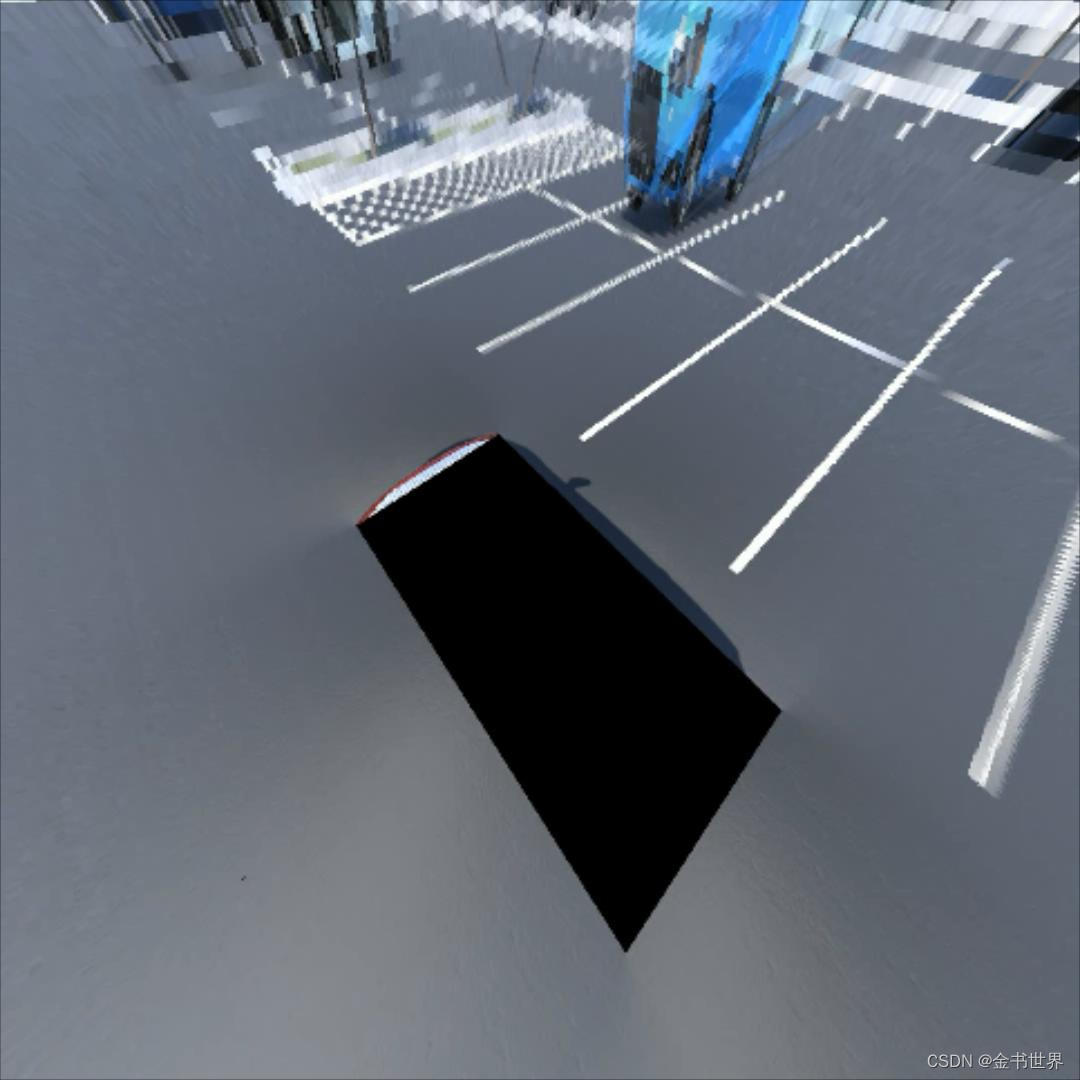
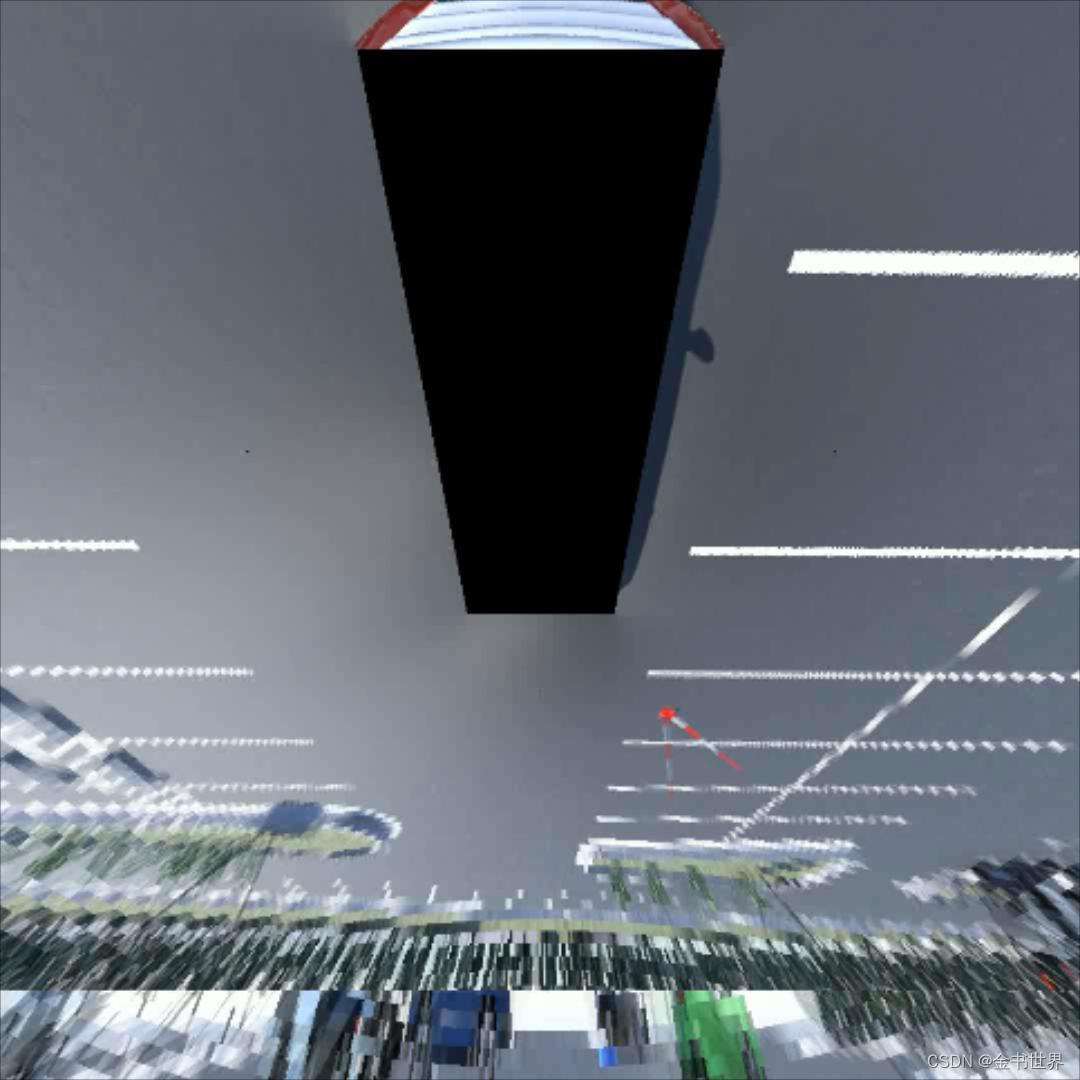
算法的实现过程
根据当前的相机参数在保证算法的实际效果的前提下设置旋转角度的范围
- AVMData.A_rx = 114; //[72 114]
- AVMData.A_ry = 0;//[0 360]
- AVMData.A_rz = 0;//[-20 20]
在绕车辆周围旋转时,由于车辆是长方形的,不能在在车周围圆形的旋转吗,所以当前的额 算法是按照椭圆的方式旋转路径。
- //椭圆a=4000,b=3000
- float aa = 5000; float bb = 4000;
- float qq = Data->A_ry * 3.1415927 / 180;
-
- Data->A.x = aa * sin(qq);
- Data->A.y = Data->CameraH_A;
- Data->A.z = -bb * cos(qq);
-
- Data->F.x = 0;
- Data->F.y = Data->CameraH_F;
- Data->F.z = (Data->FW + Data->BW) / 2;
-
- Data->B.x = 0;
- Data->B.y = Data->CameraH_B;
- Data->B.z = -(Data->FW + Data->BW) / 2;
-
-
- Data->L.x = -Data->LW;
- Data->L.y = Data->CameraH_B;
- Data->L.z = Data->F.z- Data->FW;
-
- Data->R.x = Data->RW;
- Data->R.y = Data->CameraH_B;
- Data->R.z = Data->F.z - Data->FW;

初始化相机的参数
- js_initAngle(Data->data_TOP_B, Data->A_rx, -Data->A_ry,-Data->A_rz); js_initAngleT(Data->data_TOP_B, Data->data_TOP_T_B);
- js_initAngle(Data->data_TOP_A, Data->A_rx, Data->A_ry,Data->A_rz); js_initAngle(Data->data_0_A, 0, 0, 0); js_initAngleT(Data->data_TOP_A, Data->data_TOP_T_A);
- js_initAngle(Data->data_0_F, 25, 0, 0);
- js_initAngle(Data->data_0_B, 25, 180, 0);
- js_initAngle(Data->data_0_L, 25, 90, 0);
- js_initAngle(Data->data_0_R, 25, -90, 0);
计算车辆的拼接交点位置
- js_pointf Psrc;
- js_3Dpointf Pdst_LF, Pdst_RF, Pdst_LB, Pdst_RB;
- Pdst_LF.x = Data->L.x;
- Pdst_LF.y = Data->CameraH_A;
- Pdst_LF.z = Data->F.z;// -Data->A.z;
- js_World2Plane(Data->data_TOP_A, Data->Aa, Pdst_LF, &Data->LFsrc, Data->Af, Data->Ac, Data->zc);
-
- Pdst_RF.x = Data->R.x;
- Pdst_RF.y = Data->CameraH_A;
- Pdst_RF.z = Data->F.z;// -Data->A.z;
- js_World2Plane(Data->data_TOP_A, Data->Aa, Pdst_RF, &Data->RFsrc, Data->Af, Data->Ac, Data->zc);
-
- Pdst_LB.x = Data->L.x;
- Pdst_LB.y = Data->CameraH_A;
- Pdst_LB.z = Data->B.z; //Data->A.z - Data->B.z;
- js_World2Plane(Data->data_TOP_A, Data->Aa, Pdst_LB, &Data->LBsrc, Data->Af, Data->Ac, Data->zc);
-
- Pdst_RB.x = Data->R.x;
- Pdst_RB.y = Data->CameraH_A;
- Pdst_RB.z = Data->B.z; //Data->A.z - Data->B.z;
- js_World2Plane(Data->data_TOP_A, Data->Aa, Pdst_RB, &Data->RBsrc, Data->Af, Data->Ac, Data->zc);
获取四个摄像头的图像数据(本测试使用的是opencv读取图像的方式实现的)
- IplImage* img_F = cvLoadImage("Front.png");
- IplImage* img_B = cvLoadImage("Back.png");
- IplImage* img_L = cvLoadImage("Left.png");
- IplImage* img_R = cvLoadImage("Right.png");
算法实现函数
js_getAVM_TOP(&AVMData, img_AVM->imageData, img_F->imageData, img_B->imageData, img_L->imageData, img_R->imageData, img_F->width, img_F->height, img_AVM->width, img_AVM->height, img_AVM->nChannels);算法的图片的测试代码
- // TODO: 在此添加控件通知处理程序代码
- IplImage* img_AVM = cvCreateImage(cvSize(1080, 1080), 8, 3);
- IplImage* img_AVM_resize = cvCreateImage(cvSize(404, 720), 8, 3);
- IplImage* img_F = cvLoadImage("Front.png");
- IplImage* img_B = cvLoadImage("Back.png");
- IplImage* img_L = cvLoadImage("Left.png");
- IplImage* img_R = cvLoadImage("Right.png");
- IplImage* det_TOP_F = cvCreateImage(cvSize(img_F->width, img_F->height), img_F->depth, img_F->nChannels);
- IplImage* det_TOP_B = cvCreateImage(cvSize(img_B->width, img_B->height), img_B->depth, img_B->nChannels);
- IplImage* det_TOP_L = cvCreateImage(cvSize(img_L->width, img_L->height), img_L->depth, img_L->nChannels);
- IplImage* det_TOP_R = cvCreateImage(cvSize(img_L->width, img_L->height), img_L->depth, img_L->nChannels);
-
- CvVideoWriter* writer = cvCreateVideoWriter("G:\\CSDN\\AVM\\Video\\AVM_Angle.avi", CV_FOURCC('X', 'V', 'I', 'D'), 25, cvSize(1080, 1080));
-
- js_AVM_obj AVMData;
- AVMData.A_rx = 114; //[72 114]
- AVMData.A_ry = 0;//[0 360]
- AVMData.A_rz = 0;//[-20 20]
- //AVMData.A_rx = 90; //[72 114]
- //AVMData.A_ry = 450;//[0 360]
- //AVMData.A_rz = -20;//[-20 20]
- int stept_index = 0;
- while (1)
- {
- js_init_avm(&AVMData, img_AVM->width, img_AVM->height);
- js_getAVM_TOP(&AVMData, img_AVM->imageData, img_F->imageData, img_B->imageData, img_L->imageData, img_R->imageData, img_F->width, img_F->height, img_AVM->width, img_AVM->height, img_AVM->nChannels);
-
- //cvCircle(img_AVM, cvPoint(AVMData.LFsrc.x, AVMData.LFsrc.y), 3, CV_RGB(255, 0, 0), 3);
- //cvCircle(img_AVM, cvPoint(AVMData.RFsrc.x, AVMData.RFsrc.y), 3, CV_RGB(255, 0, 0), 3);
- //cvCircle(img_AVM, cvPoint(AVMData.LBsrc.x, AVMData.LBsrc.y), 3, CV_RGB(255, 0, 0), 3);
- //cvCircle(img_AVM, cvPoint(AVMData.RBsrc.x, AVMData.RBsrc.y), 3, CV_RGB(255, 0, 0), 3);
-
- switch (stept_index)
- {
- case 0://x轴
- AVMData.A_rx = AVMData.A_rx - 1;
- if (AVMData.A_rx == 72)
- {
- stept_index = 1;
- AVMData.A_ry = 0;
- }
- break;
- case 1://y轴
- AVMData.A_ry = AVMData.A_ry + 1;
- if (AVMData.A_ry == 450)
- {
- stept_index = 2;
- AVMData.A_rx = 90;
- AVMData.A_rz = -20;
- }
- break;
- case 2://z轴
- AVMData.A_rz = AVMData.A_rz + 1;
- if (AVMData.A_rz == 20)
- {
- stept_index = 3;
- }
- break;
- default:
- break;
- }
- if (stept_index == 3)break;
-
-
- cvShowImage("img", img_AVM);
-
- cvWriteFrame(writer, img_AVM);
- cvWaitKey(10);
- free(AVMData.Ftable);
- free(AVMData.Btable);
- free(AVMData.Ltable);
- free(AVMData.Rtable);
-
- }
-
- cvReleaseVideoWriter(&writer);
- cvWaitKey(0);
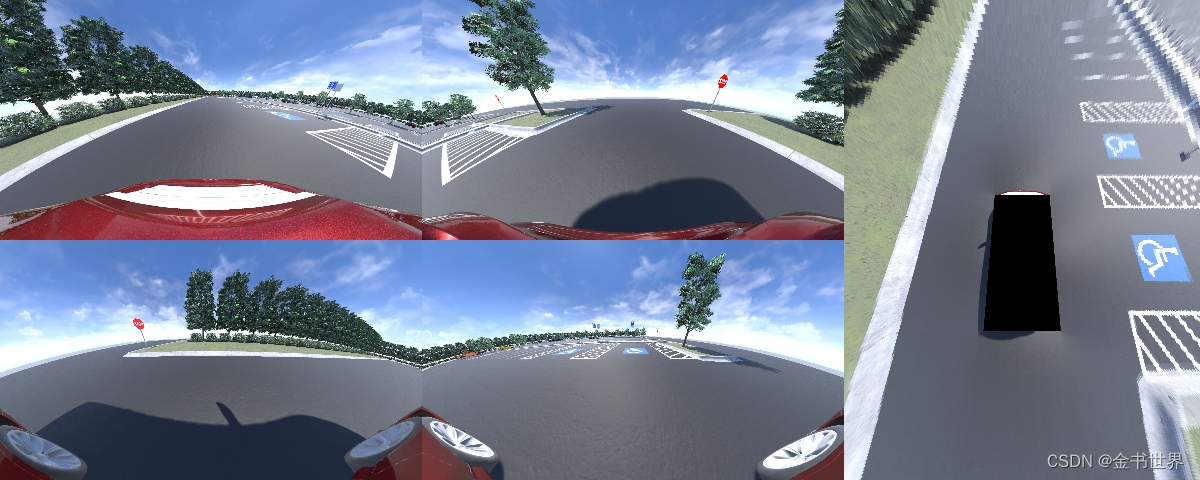
算法视频测试代码
- // TODO: 在此添加控件通知处理程序代码
- IplImage* img_AVM_all = cvCreateImage(cvSize(1280*2+1080, 1440), 8, 3);
- IplImage* img_AVM = cvCreateImage(cvSize(1080, 1440), 8, 3);
- IplImage* img_AVM_resize = cvCreateImage(cvSize(1200, 480), 8, 3);
- IplImage* det_TOP_F = cvCreateImage(cvSize(1280, 720), 8, 3);
- IplImage* det_TOP_B = cvCreateImage(cvSize(1280, 720), 8, 3);
- IplImage* det_TOP_L = cvCreateImage(cvSize(1280, 720), 8, 3);
- IplImage* det_TOP_R = cvCreateImage(cvSize(1280, 720), 8, 3);
-
- CvVideoWriter* writer = cvCreateVideoWriter("G:\\CSDN\\AVM\\Video\\AVM_Result1.avi", CV_FOURCC('X', 'V', 'I', 'D'), 25, cvSize(1280 * 2 + 1080, 1440));
- cvNamedWindow("视频播放", CV_WINDOW_AUTOSIZE);
- CvCapture* C_img_F = cvCreateFileCapture("G:\\CSDN\\AVM\\Video\\Front.avi");
- CvCapture* C_img_B = cvCreateFileCapture("G:\\CSDN\\AVM\\Video\\Back.avi");
- CvCapture* C_img_L = cvCreateFileCapture("G:\\CSDN\\AVM\\Video\\Left.avi");
- CvCapture* C_img_R = cvCreateFileCapture("G:\\CSDN\\AVM\\Video\\Right.avi");
- IplImage* img_F, *img_B, *img_L, *img_R;
- js_AVM_obj AVMData;
- AVMData.A_rx = 80; //[72 114]
- AVMData.A_ry = 0;//[0 360]
- AVMData.A_rz = 0;//[-20 20]
- js_init_avm(&AVMData, img_AVM->width, img_AVM->height);
- while (img_F = cvQueryFrame(C_img_F))
- {
- img_B = cvQueryFrame(C_img_B);
- img_L = cvQueryFrame(C_img_L);
- img_R = cvQueryFrame(C_img_R);
- js_getAVM_TOP(&AVMData, img_AVM->imageData, img_F->imageData, img_B->imageData, img_L->imageData, img_R->imageData, img_F->width, img_F->height, img_AVM->width, img_AVM->height, img_AVM->nChannels);
-
-
- cvSetImageROI(img_AVM_all, cvRect(0, 0, 1280, 720));
- cvCopy(img_F, img_AVM_all);
- cvResetImageROI(img_AVM_all);
-
- cvSetImageROI(img_AVM_all, cvRect(1280, 0, 1280, 720));
- cvCopy(img_B, img_AVM_all);
- cvResetImageROI(img_AVM_all);
-
- cvSetImageROI(img_AVM_all, cvRect(0, 720, 1280, 720));
- cvCopy(img_L, img_AVM_all);
- cvResetImageROI(img_AVM_all);
-
- cvSetImageROI(img_AVM_all, cvRect(1280, 720, 1280, 720));
- cvCopy(img_R, img_AVM_all);
- cvResetImageROI(img_AVM_all);
-
- cvSetImageROI(img_AVM_all, cvRect(1280*2, 0, 1080, 1440));
- cvCopy(img_AVM, img_AVM_all);
- cvResetImageROI(img_AVM_all);
-
- cvWriteFrame(writer, img_AVM_all);
- cvResize(img_AVM_all, img_AVM_resize);
- cvShowImage("视频播放", img_AVM_resize);
- char c = cvWaitKey(1);
- if (c == 27)break;
- }
- cvReleaseVideoWriter(&writer);
- cvReleaseCapture(&C_img_F);
- cvReleaseCapture(&C_img_B);
- cvReleaseCapture(&C_img_L);
- cvReleaseCapture(&C_img_R);
- cvDestroyWindow("视频播放");
测试效果的视频
AVM的实现的自由角度旋转
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/Guff_9hys/article/detail/869625
推荐阅读
相关标签

