
热门标签
热门文章
- 1小程序优化指南(主包过大、组件不通过、图片和音频资源超过200K)_小程序图片和音频不超过200k
- 2鸿蒙4.0开发笔记之DevEco Studio之配置代码片段快速生成(三)_开发鸿蒙作品含代码
- 3Python 3.9来了!这十个新特性值得关注(文末评论区留言有福利赠送)
- 4Kotlin的Spring之旅(一):使用IDEA搭建Gradle+Kotlin+Spring项目_idea kotlin spring
- 5Anaconda下载安装及配置pytorch环境
- 6系统启动速度优化-Android OS启动优化_preloadclasses的优化
- 7Erlang语法知识点学习总结_erlang语言 hd
- 8怎么做微信小程序?做微信小程序的步骤_微信小程序怎么做
- 9trunk
- 10Unity集成内嵌网页插件-支持Android和IOS_unity 集成网页 安卓平台
当前位置: article > 正文
实测 (三)NVIDIA Xavier NX + D435i / 奥比中光Astrapro 相机+ ORB-SLAM 2 + 3 稠密回环建图_astrapro.yaml文件
作者:IT小白 | 2024-03-21 10:16:53
赞
踩
astrapro.yaml文件
开发环境:NX+Ubuntu18.04+ROS-melodic
接着上篇,使用奥比中光的Astrapro相机(乐视三合一相机)orb-slam2稠密回环建图
依然先放上效果图:
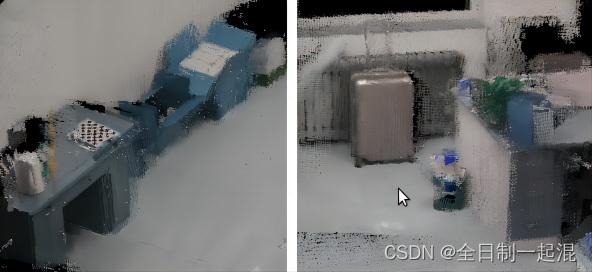
三、NX + Astrapro相机+orb-slam2 稠密回环建图
3.1 安装奥比中光Astrapro的SDK
(1)安装依赖
- sudo apt-get install libudev-dev
- sudo apt-get install libopenal-dev
- sudo apt-get install libvorbis-dev
- sudo apt install ros-melodic-rgbd-launch
(2)新建工作空间
- mkdir -p ~/astra_ws/src
- cd astra_ws
- catkin_make
- source devel/setup.bash
(3)下载编译sdk
- cd astra_ws/src
- git clone https://github.com/orbbec/ros_astra_camera
- cd ..
- catkin_make
(4)配置设备节点,并再次编译
- roscd astra_camera
- ./scripts/create_udev_rules
-
- cd ~/astra_ws
- catkin_make --pkg astra_camera
(5)修改 astrapro.launch
首先插上相机,首先查看相机接口
lsusb其中:
- Bus 001 Device 019: ID 2bc5:0502 // RGB模块 可能有的显示0501
- Bus 001 Device 018: ID 2bc5:0403 // 深度模块
根据显示,对应修改astrapro.launch中, 0x0501 改为上面的 0x0502(如果上面显示的是0501就不用改)
(6)启动相机
- sudo su //不运行su命令,直接打开会丢失深度信息
- souce devel setup.bash
- roslaunch astra_carma astrapro.launch
3.2 运行建图
(1)修改ORB-SLAM2_RGBD_DENSE_MAP/Examples/ROS/ORB_SLAM21/src/ros_rgbd.cc的topic
- message_filters::Subscriber<sensor_msgs::Image> rgb_sub(nh, "/camera/rgb/image_raw", 1);
- message_filters::Subscriber<sensor_msgs::Image> depth_sub(nh, "/camera/depth_registered/image_raw", 1);
之后重新编译
./build_ros.sh(2)配置astrapro.yaml文件
复制Asus.yaml,并重命名astrapro.yaml,修改其中的内参camera.bf。需要完整版的yaml文件,可以在评论区留下联系邮箱
(3)运行
rosrun ORBSLAM21 RGBD Vocabulary/ORBvoc.bin Examlpe/ROS/ORB_SLAM21/astrapro.yaml声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/IT小白/article/detail/280372
推荐阅读
相关标签

