
热门标签
热门文章
- 1MS Access 教程之如何将 MDB 文件转换为 SQLite 数据库_mdb转sqlite
- 2《花雕学AI》ChatGPT Shortcut Chrome 扩展:让生产力和创造力加倍的 ChatGPT 快捷指令库
- 3用通俗易懂的方式讲解:决策树模型及案例(Python 代码)
- 4ubuntu下使用ollama来运行gemma_ubuntu ollama
- 5Bert几个数据集的概念Cola、MRPC、XNLI、MNLI等_mrpc数据集
- 6小程序实现卡片式设计(又叫原子化设计)_小程序css卡片效果
- 7【Pytorch(七)】基于 PyTorch 实现残差神经网络 ResNet_resnet18.pt
- 8【氮化镓】同质GaN垂直PiN二极管的SEB
- 9oracle镜像装载不到软盘中,Oracle ASM无法识别扩展分区的磁盘设备
- 10Bert基础(一)--自注意力机制_bert中transformer编码器
当前位置: article > 正文
mid360激光雷达跑Point-LIO算法_mid360外参
作者:IT小白 | 2024-04-10 12:24:07
赞
踩
mid360外参
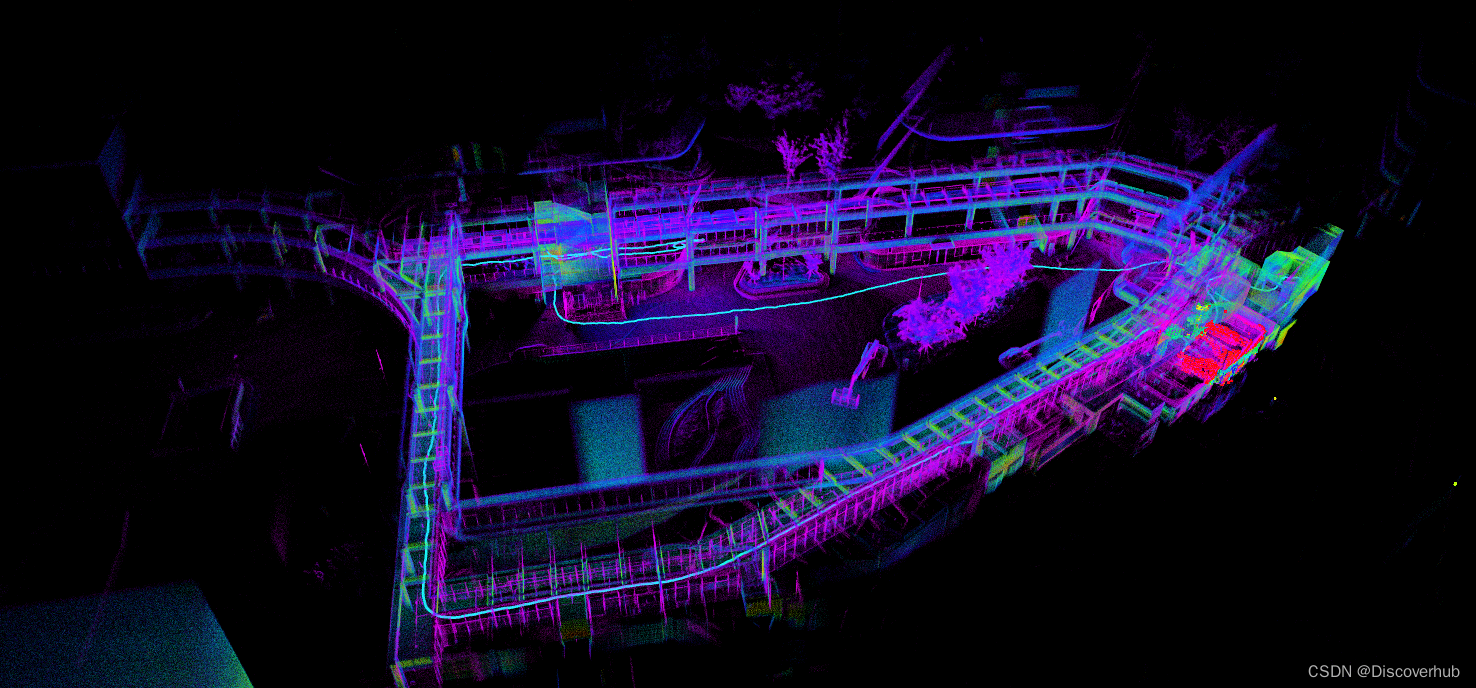
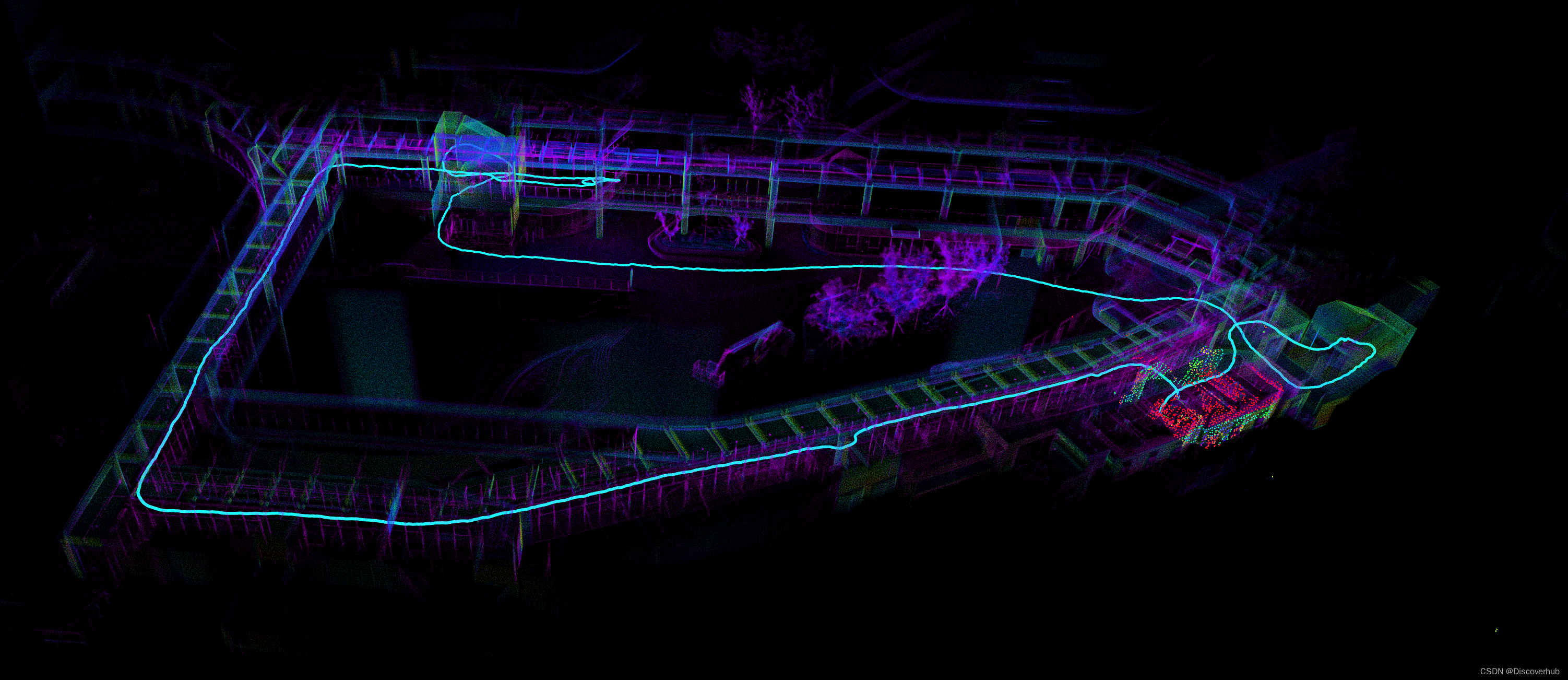
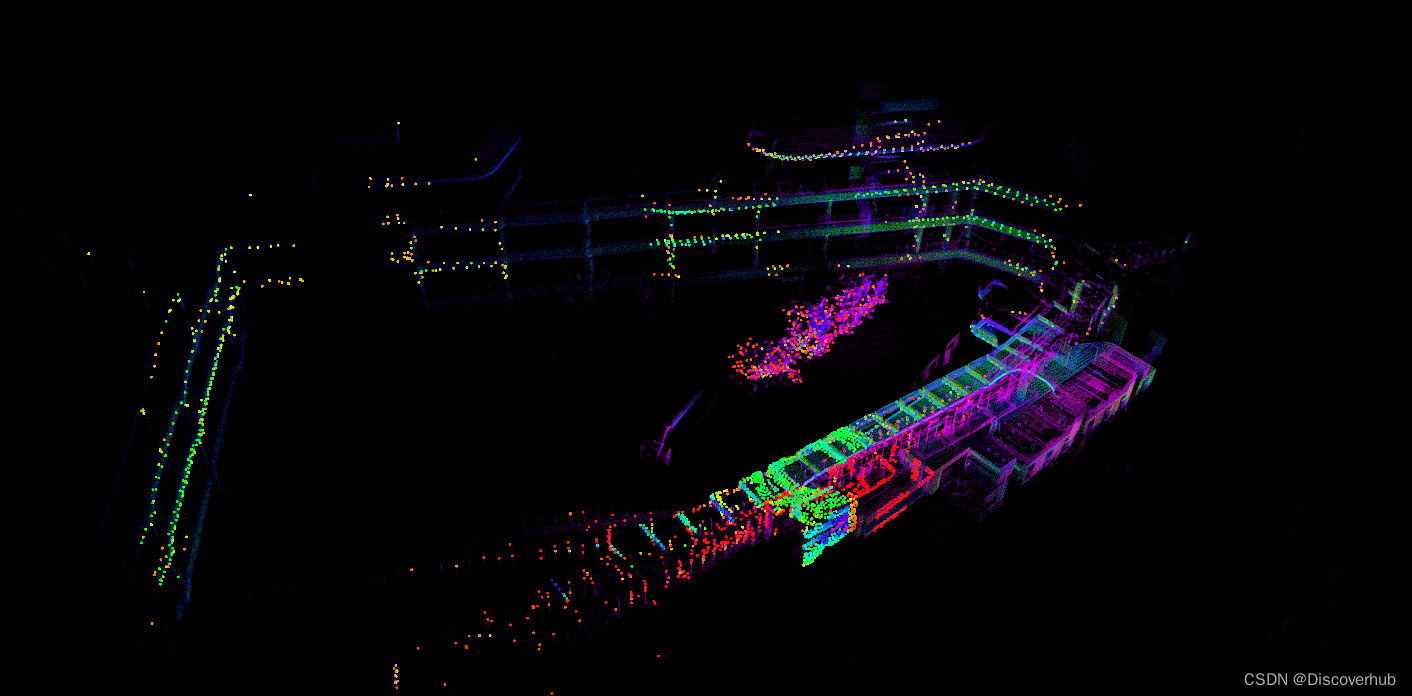
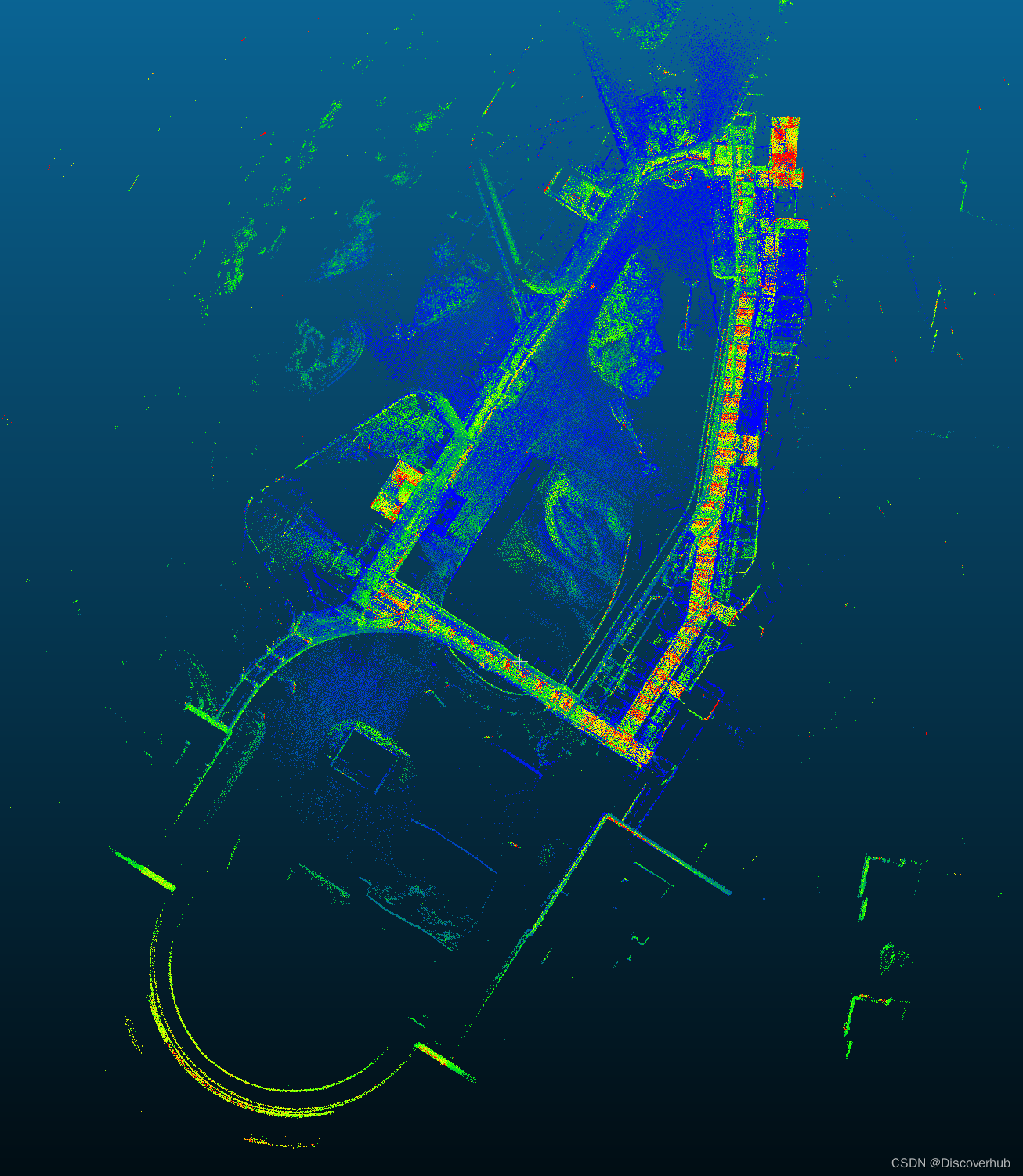
在商场里面上下楼穿梭,使用mid360激光雷达,完成建图
以下是建图的运行过程及参数配置
mid360激光雷达驱动
安装(ubuntu20.4 )
/ws_livox/src/livox_ros_driver2$source /opt/ros/noetic/setup.sh
/ws_livox/src/livox_ros_driver2$./build.sh ROS1
- 1
- 2
配置修改MID360_config.json
192.168.1.5,是本机ip
192.168.1.157是激光ip
57是激光雷达的sn号后两位
推荐阅读
相关标签

