
热门标签
热门文章
- 12024数学建模时间汇总与竞赛攻略
- 2轻松下载Axure元件库,聚合国内外最全资源!_axure9 lib库下载
- 3互联网轻量级框架整合之MyBatis核心组件
- 4Spring The last packet sent successfully to the server was 0 milliseconds ago._spring boot druil the last packet sent successfull
- 5解决Docker desktop requires the server service to be enabled Windows 10
- 6mysql各种索引名称_MySQL索引类型大汇总
- 7Mac通过自带终端连接linux服务器_mac连接linux服务器
- 8智能家居HomeAssistant(三)MQTT配置_homelessness 安装mqtt
- 9AcoustID音频指纹环境配置--Server
- 10Hugging Face 开源 8B 视觉大模型;OpenAI 推出批量 API | AI 头条
当前位置: article > 正文
Ros Navgation配置D*Lite算法进行gazebo小车仿真
作者:IT小白 | 2024-04-14 20:37:55
赞
踩
Ros Navgation配置D*Lite算法进行gazebo小车仿真
Ros Navgation配置D*Lite算法进行gazebo小车仿真
ROS navgation
学习网站:http://wiki.ros.org/cn/navigation/Tutorials/RobotSetup
下载D* lite算法包,在工作空间下编译
https://blog.csdn.net/lqzdreamer/article/details/85108310
- 1
ctrl+alt+t打开终端,cd进入自己的工作空间内
catkin_make
- 1
编译工作空间
报错以及解决方式
出现了如下报错

在对应.cpp文件和.h文件中添加头文件
#include <tf/transform_broadcaster.h>
- 1
bash Dstar.cpp dstar_global_planner.cpp Dstar.h dstar_global_planner.h
这四个文件添加头文件后进行编译
出现了如下报错
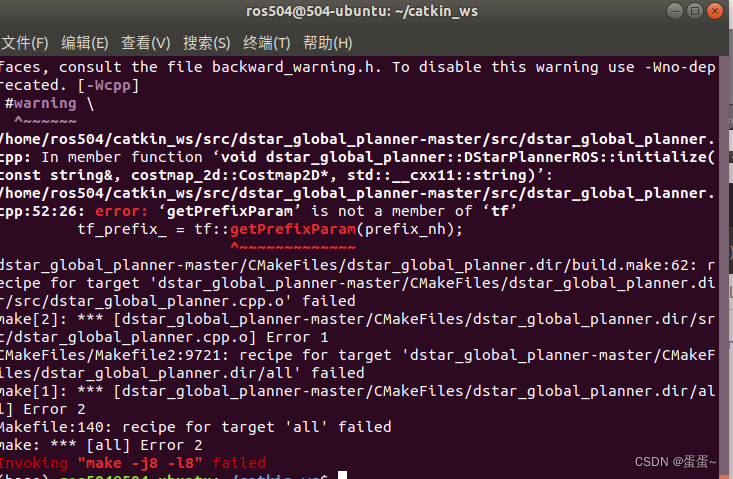
将报错提示信息中的dstar_global_planner.cpp文件里的tf_prefix_ = tf::getPrefixParam(prefix_nh);注释掉就可以正常编译了。
修改move_base
在move_base.launch文件中修改
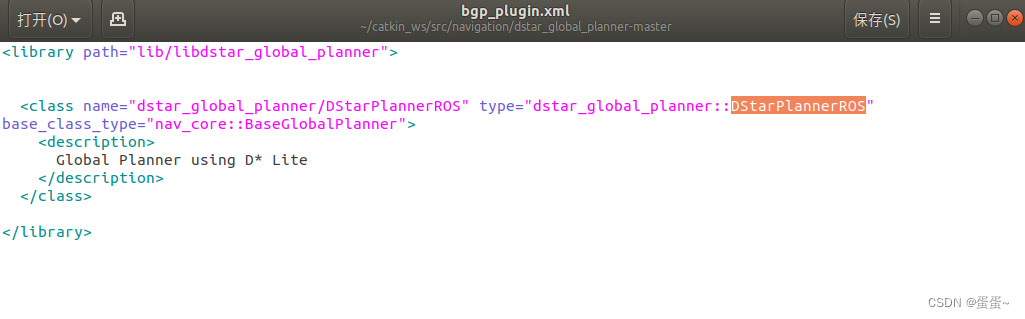
<param name="base_global_planner" value="dstar_global_planner/DStarPlannerROS"/>
- 1
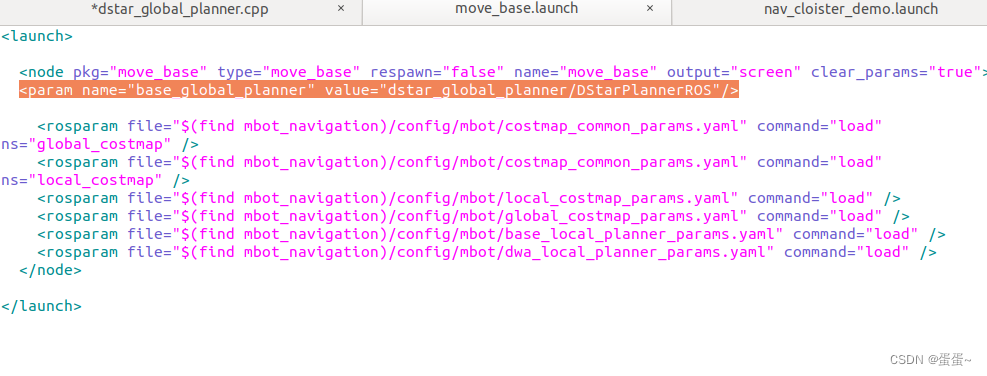
要和下载下来的dstar_global_planner-master里的bgp_plugin.xml下的名字一样,如下图
对比仿真实验验证
运行gazebo和Rviz
(绿色线条为生成的轨迹)
D*+DWA算法规划得到的路径如下
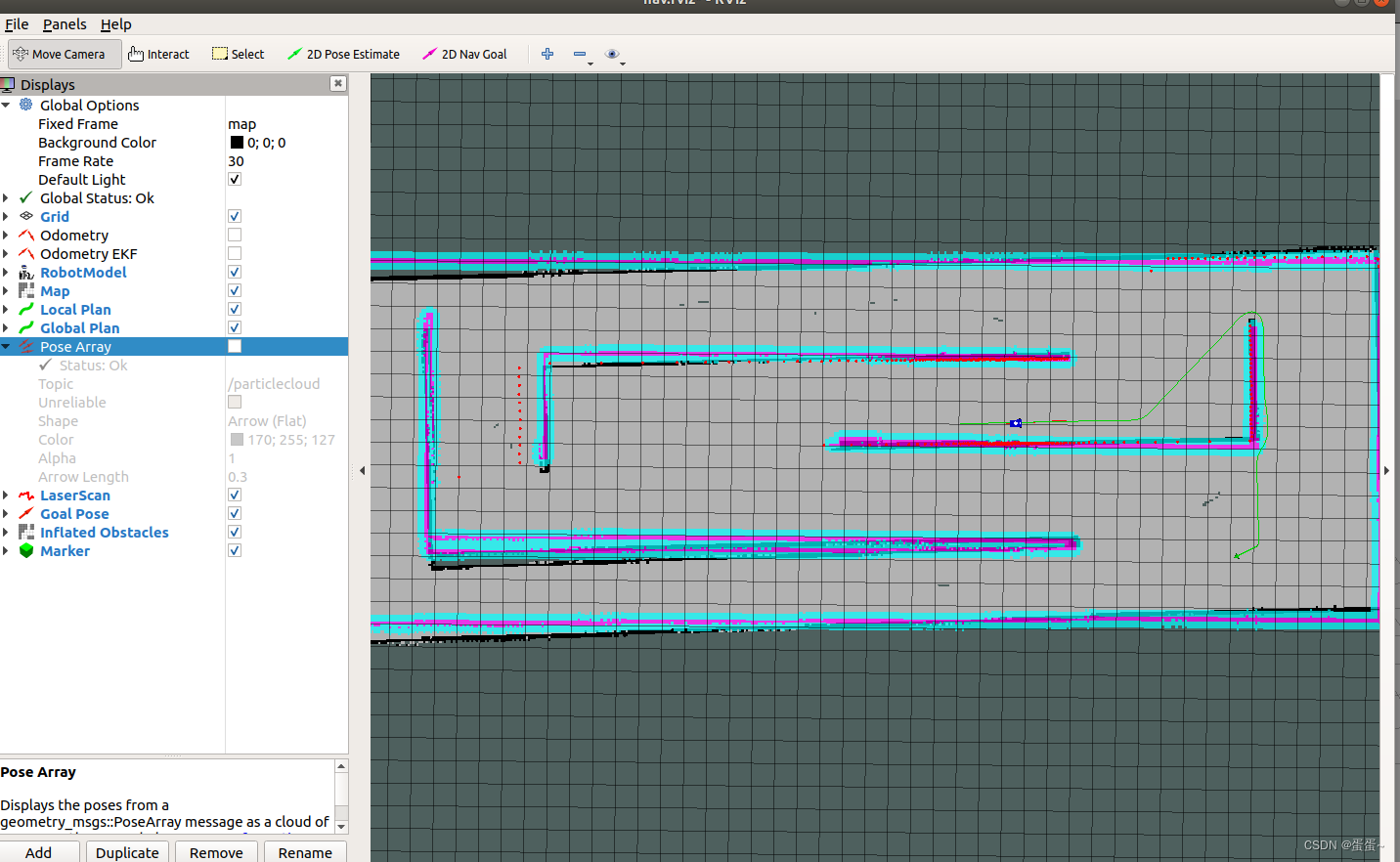
move_base默认全局路径规划+DWA局部路径规划得到的路径如下
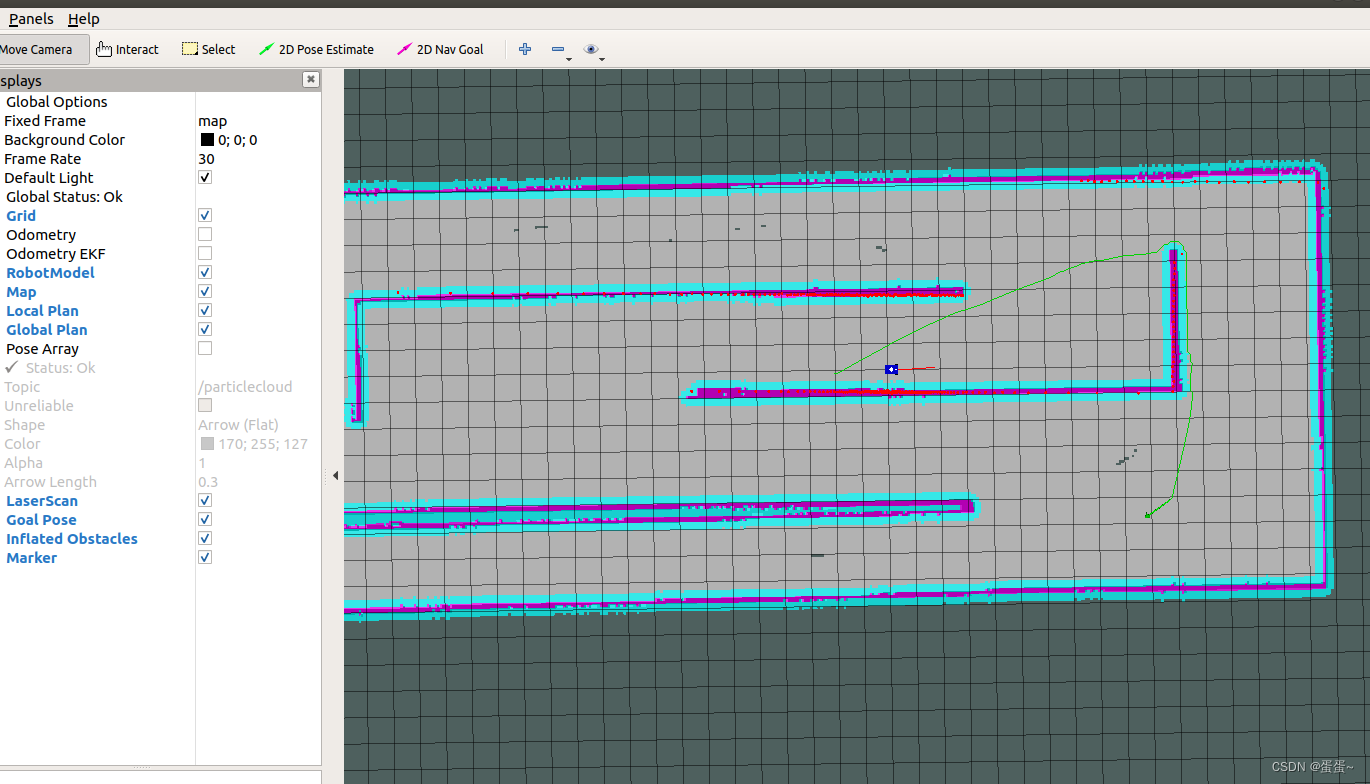
在仿真实验中的表现来看这两种算法除了生成的轨迹不同外,D*得出轨迹所需的时间明显耗费的时间更久,既就是需要更多的算力。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/IT小白/article/detail/424002
推荐阅读
相关标签

