
- 1Python防止sql注入的有效方法_python api 接口 防sql注入 方法
- 2ZOC8 for Mac(最好用的终端仿真器)_zoc for mac
- 3jenkins添加git repository报错 returned status code128_jenkins git 128
- 4现在很多公司为什么热衷于招内部推荐的人呢_好工作都是内推
- 5Python函数的使用-参数_deffunc(a,b)
- 6数据安全分类分级剖析_数据资源安全等级智能推荐
- 7java文件写入_关于Java中向文件写入数据的问题
- 8Windows安装Ollama结合内网穿透实现公网访问本地大语言模型Web交互界面_ollama更改默认文件
- 9vue3实现通用后台管理(傻瓜式一步一步记录代码实现过程)_vue3没用ts前端模板后台管理
- 10基于人脸先验的人脸超分FSRNet
【STM32基础 CubeMX】定时器的使用_cubemx 定时器
赞
踩
前言
在嵌入式系统开发中,精确地控制时间和时序是至关重要的。STM32微控制器提供了强大的定时器功能,使开发者能够轻松地实现各种时间相关任务。本文将介绍STM32定时器的基础知识和使用方法,帮助初学者了解如何在STM32上利用定时器实现定时任务、生成脉冲信号、进行计时等操作。无论您是想要构建一个简单的LED闪烁应用还是一个复杂的实时控制系统,理解定时器的使用都是至关重要的。
一、定时器是什么
STM32定时器可以类比为一个微控制器内部的计时器或闹钟。它是一种功能强大的硬件设备,能够在微控制器中帮助你测量时间、生成精确的时间延迟、控制外部设备的时序等。就像你可以使用手机上的闹钟来定时唤醒你一样,STM32定时器可以定时触发某些任务,比如发送传感器数据、控制电机、生成脉冲信号等。这使得它在各种应用中非常有用,从物联网设备到工业控制系统都可以看到它的身影。简而言之,STM32定时器是微控制器内部的一种计时工具,用于精确控制时间和执行特定的时间相关任务。
二、CubeMX配置定时器
1、在cubeMX选中指定的定时器:
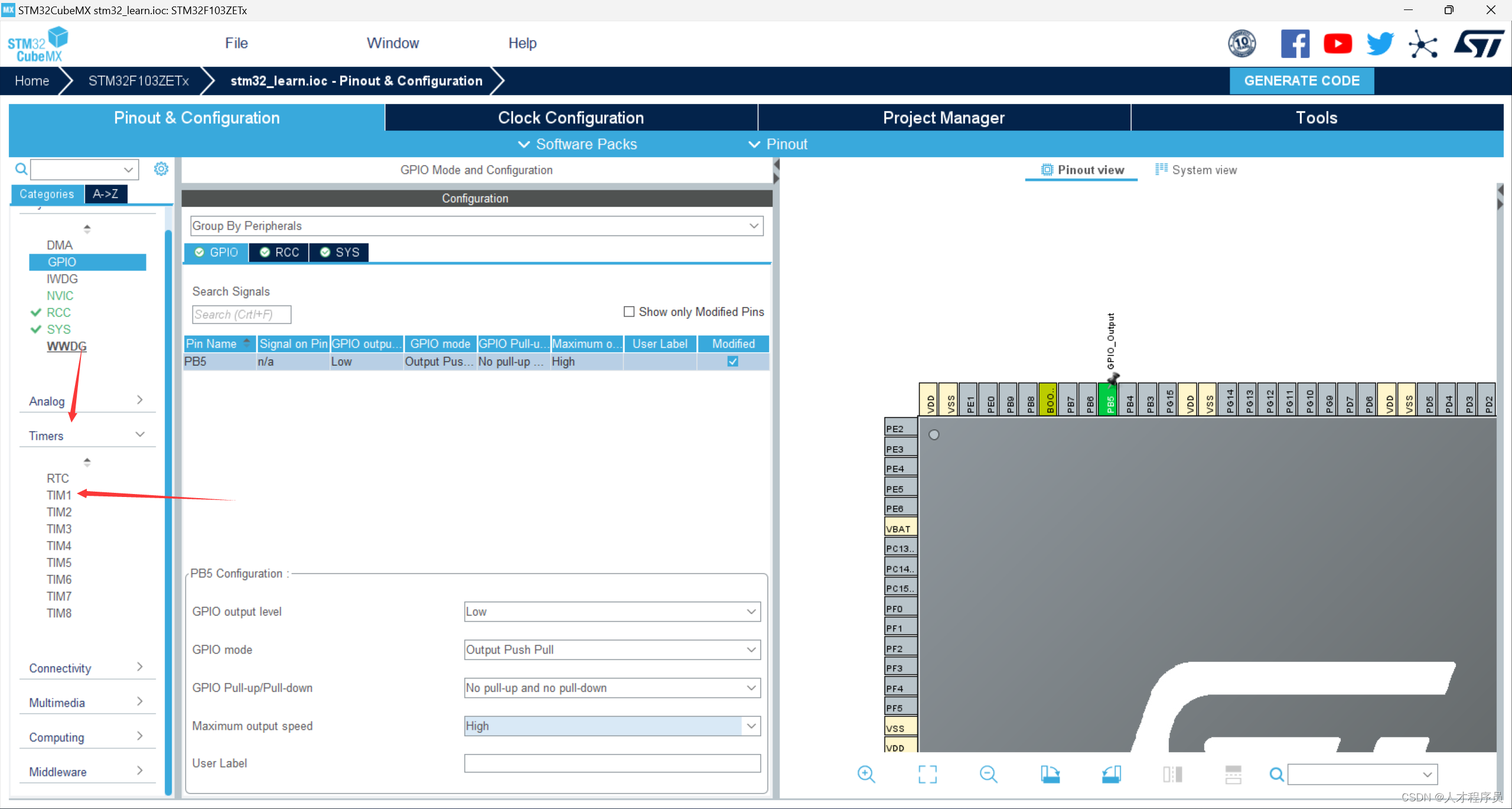
比如这边就选中TIM1,就是定时器1
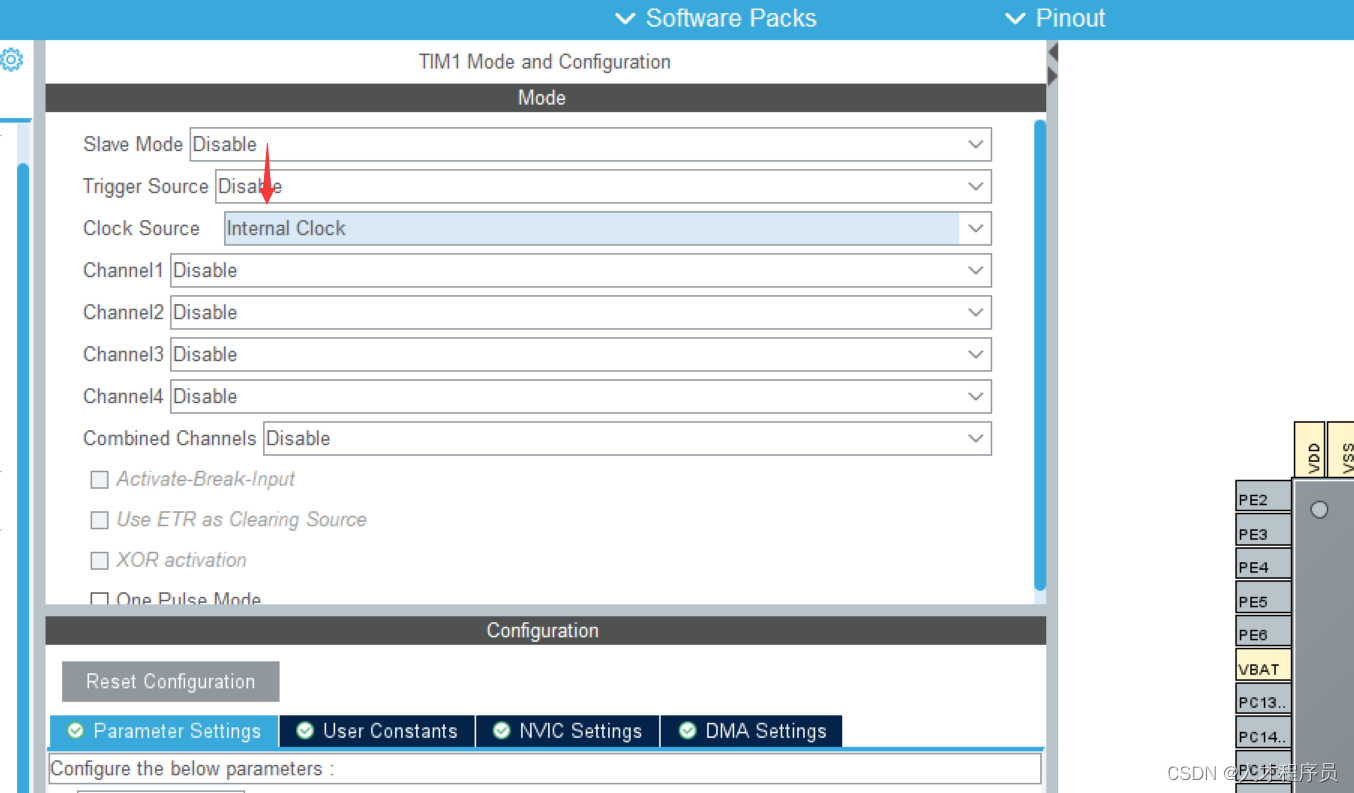
2、首先把时钟源设置为内部的时钟源:
3、配置timer

a.分频系数的解释:
在CubeMX或者STM32CubeIDE中,分频系数是用来控制某些外部设备或系统时钟频率的设置。简单来说,它就像是一个数学公式中的分母,用来决定系统时钟或外部设备的频率如何被分割或减小。
想象一下,你有一个时钟,它正以每秒钟滴答一次。如果你将分频系数设置为2,那么这个时钟就会以每两秒钟滴答一次,频率减半了。如果你将分频系数设置为4,那么时钟就会以每四秒钟滴答一次,频率减为原来的四分之一。
同样的概念也适用于微控制器或其他外部设备的时钟。通过设置分频系数,你可以降低或提高时钟频率,以满足特定应用的要求。这个功能非常有用,因为它允许你灵活地适应不同的硬件和应用场景,而无需改变物理硬件连接。
那么根据一个计算公式,他需要你分频-1,才是你需要的分配次数。
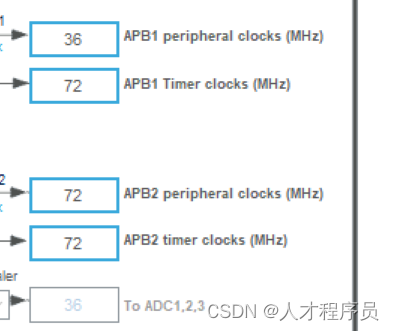
我们写72-1就是说把定时器的时钟频率变成1MHz。如上图
b.设置一个周期
50000的意思为50000ms,转换之后就是50毫秒,然后他也需要-1,才是真正的时间
如果你需要100毫秒,就是这样:100000-1,其他的依次类推。
4、开启定时器更新中断
 != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim1, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_UPDATE;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
TIM_ClockConfigTypeDef sClockSourceConfig = {0};:定义一个名为sClockSourceConfig的结构体变量,用于配置定时器的时钟源参数,并初始化所有字段为0。
TIM_MasterConfigTypeDef sMasterConfig = {0};:定义一个名为sMasterConfig的结构体变量,用于配置定时器的主模式参数,并初始化所有字段为0。
hTIM1.Instance = TIM1;:设置定时器句柄(hTIM1)的实例为TIM1,指定了要配置的定时器模块。
hTIM1.Init.Prescaler = 72-1;:配置定时器的预分频器值,这里设置为72-1。预分频器用于将输入时钟分频,以得到定时器的时钟信号。
hTIM1.Init.CounterMode = TIM_COUNTERMODE_UP;:配置定时器的计数模式为向上计数,即从0开始递增计数。
htim1.Init.Period = 50000-1;:配置定时器的周期值,这里设置为50000-1。周期值决定了定时器何时溢出并重新从零开始计数。
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;:配置时钟分频因子,这里设置为不分频(TIM_CLOCKDIVISION_DIV1)。
htim1.Init.RepetitionCounter = 0;:配置重复计数器的值,这里设置为0,表示不使用重复计数功能。
htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;:配置自动重载预装载寄存器的设置,这里禁用了预装载。
if (HAL_TIM_Base_Init(&htim1) != HAL_OK):使用HAL库初始化定时器。如果初始化失败,将调用Error_Handler()函数来处理错误。
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;:配置定时器的时钟源为内部时钟源。
if (HAL_TIM_ConfigClockSource(&htim1, &sClockSourceConfig) != HAL_OK):配置定时器的时钟源为内部时钟源。如果配置失败,将调用Error_Handler()函数来处理错误。
sMasterConfig.MasterOutputTrigger = TIM_TRGO_UPDATE;:配置主定时器触发输出源为更新事件(TIM_TRGO_UPDATE)。
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;:配置主从模式,这里禁用了主从模式。
if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK):配置主从模式参数。如果配置失败,将调用Error_Handler()函数来处理错误。
这段代码的目的是配置STM32的定时器TIM1,以便在特定时钟源、计数模式和周期等设置下工作。这通常用于生成精确的时间间隔、脉冲或触发事件,以满足各种应用需求。
3.2 几个库函数
以中断的方式开启定时器
HAL_TIM_Base_Start_IT 是STM32 HAL库中的一个函数,用于启动定时器并启用定时器中断。以下是该函数的函数原型、作用以及参数含义:
函数原型:
HAL_StatusTypeDef HAL_TIM_Base_Start_IT(TIM_HandleTypeDef *htim);
- 1
作用:
HAL_TIM_Base_Start_IT 的作用是启动定时器,并允许它在达到预设的定时周期时触发中断。这通常用于周期性的定时器应用,其中需要定时执行某些操作,例如定时采集传感器数据、生成脉冲信号或执行其他周期性任务。
参数含义:
TIM_HandleTypeDef *htim:这是一个指向 TIM_HandleTypeDef 结构体的指针,用于标识要启动的定时器。TIM_HandleTypeDef 结构体包含了定时器的配置和状态信息。通过这个参数,函数知道要操作哪个定时器以及如何配置它。
返回值:
该函数返回一个 HAL_StatusTypeDef 类型的值,表示函数执行的状态。可能的返回值包括:
HAL_OK:函数执行成功。
其他错误代码,表示函数执行过程中出现了问题,可能包括定时器未初始化或已经在运行等错误。
总之,HAL_TIM_Base_Start_IT 函数允许你启动定时器并配置它以生成定时中断,从而实现在预定时间间隔内执行特定任务的功能。
定时器中断函数
函数原型:
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim);
- 1
无返回值,参数为定时器的句柄指针,可以通过他判断是哪个定时器。
四、定时器应用
4.1 定时器闪烁LED
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_5);
}
- 1
- 2
- 3
- 4
代码分析:
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim):定义一个名为 HAL_TIM_PeriodElapsedCallback 的回调函数,该函数会在定时器的定时周期结束时被调用。它接受一个指向 TIM_HandleTypeDef 结构体的指针作为参数,用于标识触发了回调的定时器。
{:开始函数体。
HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_5);:这一行代码的作用是切换(翻转)GPIOB端口的第5个引脚的电平状态。具体而言,它使用HAL库函数 HAL_GPIO_TogglePin 来翻转GPIOB端口的第5个引脚的电平状态。如果该引脚是低电平,则变为高电平;如果是高电平,则变为低电平。
}:结束函数体。
因此,这段代码的功能是,当定时器的定时周期结束时,会调用这个回调函数,而回调函数的作用是切换GPIOB端口的第5个引脚的电平状态。这样,可以在定时器周期性触发的时候,通过改变GPIO引脚的电平状态来实现一些周期性的操作,比如控制LED灯的闪烁。
总结
STM32定时器的使用是嵌入式系统开发中的基础技能之一。通过本文的介绍,我们了解了定时器的基本概念、配置和初始化方法,以及如何利用定时器实现各种时间相关的任务。无论您是初学者还是有经验的开发者,定时器都是在STM32上实现精确控制时间的重要工具。希望本文的内容能够帮助您更好地利用STM32定时器,从而构建出更稳定和可靠的嵌入式应用程序。如果您想要进一步探索STM32的定时器功能,建议查阅STM32官方文档和示例代码,以深入了解其更高级的特性和应用场景。

