
热门标签
热门文章
- 1python学习笔记B-13:序列结构之元组--元组的相关操作
- 2《ClickHouse企业级应用:入门、进阶与实战》8 基于ClickHouse Bitmap实现DMP用户画像标签圈人_clickhouse入门实战与进阶 pdf
- 3深度学习基础之图像分类_深度学习图像分类
- 4iOS——内购支付详解后台操作(一)_ios开发怎样在后台创建内购项目
- 5【linux】 git修改用户名和邮箱_git修改提交的用户和邮箱信息
- 625K测试老鸟5年经验的面试心得,四种公司、四种问题…_5年经验的测试,面试一般问什么
- 7已安装pymsql但仍ModuleNotFoundError: No module named pymysql 的解决_modulenotfounderror: no module named 'pymysql.util
- 8pip install换源
- 9简记:机器学习中关于训练集和测试集的标准化问题
- 10TCP协议在物联网中的实战
当前位置: article > 正文
ubuntu 18.04 使用 LIO-Livox算法 运行livox_lidar_rviz.launch文件_lio-livox的包
作者:IT小白 | 2024-05-20 12:40:02
赞
踩
lio-livox的包
一.安装步骤
安装步骤,算法原理都来自于官方,在这里不多做介绍。GitHub - Livox-SDK/LIO-Livox: A Robust LiDAR-Inertial Odometry for Livox LiDAR
参考文章
https://blog.csdn.net/hummter/article/details/130277212?spm=1001.2014.3001.5502
二.接参考文章的第三步
cd catkin_ws
source devel/setup.bash
roslaunch livox_ros_driverlivox_lidar_rviz.launch
运行这个launch文件,不需要另外开rviz,因为本身自带了,运行就可以看见图像了。
后面重点说一下如何运行数据包
三.运行已经录好的数据包
首先数据包最好是记录所有发布的话题,用指令
rosbag record -a
然后就是看一下话题的详细信息
rosbag info XXXXXXX
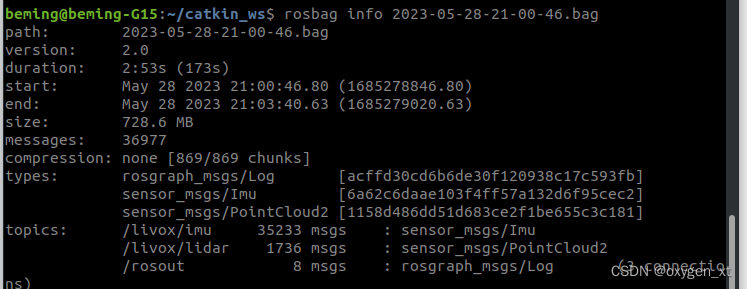
XXXX表示数据包的名称
这样可以知道bag的topic,然后在rviz 中修改topic ,Fixed_frame

分别改为/livox/lidar,livox_frame
最后运行数据包就可以
rosbag play XXXXXXXX
最后就成功了
非常的清晰

声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/IT小白/article/detail/597693
推荐阅读
相关标签

