
- 1Web 开发 6:Redis 缓存(Flask项目使用Redis并同时部署到Docker详细流程 附项目源码)_flask redis
- 2【spark源码系列】DataType原理方法示例源码详解_spark datetype
- 3chatgpt赋能python:Python编写输入法及其优势_用python写一个拼音输入法
- 4织梦联系我们单页面制作(包含地图)_html联系我们页面代码
- 52017百度AI开发者大会 一场5000名开发者的分享盛宴
- 6完美解决java.lang.ClassCastException: class java.lang.Integer cannot be cast to class java.lang.Long_java.lang.classcastexception: java.lang.integer ca
- 7Unity 3D 面试 数据结构与算法简述_unity数据结构和算法
- 8基于强化学习的空战辅助决策(2D)_afsim开源代码
- 9python:整数的最大值和最小值_python最大值与最小值
- 10Verilog 过程赋值 区别 详解_verilog 过程赋值语句是并行执行的吗
智能汽车竞赛室外光电 组 1 安装ROS软件平台和运行第一个程序_智能车竞赛ros组
赞
踩
机器人操作系统(ROS)对机器人进行编程以使其完全符合在工业环境中的要求。它的工具,库和共享的开放资源,允许开发人员协同工作,利用现有工作的优势,简化和加快创建机器人行为的过程。 ROS得到了一个庞大的全球社区的支持,其邮件列表,Wiki和ROS Answers 网站上有成千上万的活跃用户。 机器人的未来就是产业的未来,ROS 2与先进的物联网技术一起推动制造商朝着其工业4.0智能工厂目标迈进。现在,可以使多个机器人成为安全,开放源代码,连接环境的一部分,并允许操作员使用标准化的通信协议来控制整个操作。这些进步为企业提供了比传统技术更快,更轻松地实现自动化,效率和创新目标的大门。
全国大学生智能汽车竞赛室外光电组首先基于ROS搭建仿真平台,进而在实际环境中实现其算法功能,是智能汽车发展的趋势。
1. 安装 ubuntu18.04
正常安装虚拟机后,从安装文件安装 ubuntu18.04(从官网下载)
完成后要做的事情 :
1)进行更新源修改, 修改以上其中一组源为Ubuntu 18.04默认的源
修改步骤:
步骤一: 备份/etc/apt/sources.list
#备份
cp /etc/apt/sources.list /etc/apt/sources.list.bak
步骤二:
在/etc/apt/sources.list文件前面添加如下条目
#添加阿里源
deb http://mirrors.aliyun.com/ubuntu/ bionic main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-security main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-updates main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-proposed main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-backports main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-security main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-updates main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-proposed main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-backports main restricted universe multiverse
##中科大源
deb https://mirrors.ustc.edu.cn/ubuntu/ bionic main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ bionic main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu/ bionic-updates main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ bionic-updates main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu/ bionic-backports main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ bionic-backports main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu/ bionic-security main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ bionic-security main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu/ bionic-proposed main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ bionic-proposed main restricted universe multiverse
##163源
deb http://mirrors.163.com/ubuntu/ bionic main restricted universe multiverse
deb http://mirrors.163.com/ubuntu/ bionic-security main restricted universe multiverse
deb http://mirrors.163.com/ubuntu/ bionic-updates main restricted universe multiverse
deb http://mirrors.163.com/ubuntu/ bionic-proposed main restricted universe multiverse
deb http://mirrors.163.com/ubuntu/ bionic-backports main restricted universe multiverse
deb-src http://mirrors.163.com/ubuntu/ bionic main restricted universe multiverse
deb-src http://mirrors.163.com/ubuntu/ bionic-security main restricted universe multiverse
deb-src http://mirrors.163.com/ubuntu/ bionic-updates main restricted universe multiverse
deb-src http://mirrors.163.com/ubuntu/ bionic-proposed main restricted universe multiverse
deb-src http://mirrors.163.com/ubuntu/ bionic-backports main restricted universe multiverse
##清华源
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic main restricted universe multiverse
deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-updates main restricted universe multiverse
deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-updates main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-backports main restricted universe multiverse
deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-backports main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-security main restricted universe multiverse
deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-security main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-proposed main restricted universe multiverse
deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-proposed main restricted universe multiverse
步骤三: 执行更新
sudo apt-get update
sudo apt-get upgrade
可能时间要求较长,如果 一次更新不完,下次重启后再更新会从头,加上以下命令,可进行修复而不是从头再来。
sudo apt-get update –fix-missing
sudo apt-get upgrade –fix-missing充
2) 为方便与主机之间的复制粘贴,要进行虚拟机的双向复制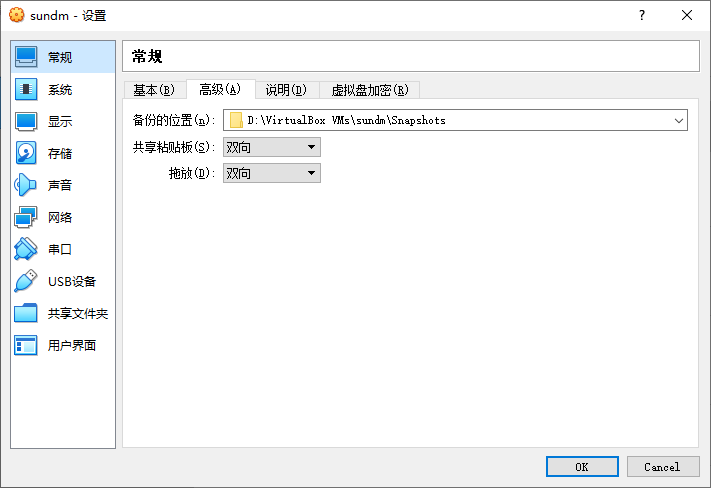
有时候这个设置还不行,要加上安装增强功能,类似vmware tools .
虚拟机启动后,点击菜单->设备,选择安装增强功能,
会在桌面产生的一个光盘文件 ,vbox_gas, 双击加载后,到其根目录下,运行命令
sudo ./VBoxLinuxAdditions.run

至此,界面可以拉伸,文件和粘贴板上的字可以与主机进行交换。
2. 安装 ROS
参考
https://ismango.blog.csdn.net/article/details/107032569
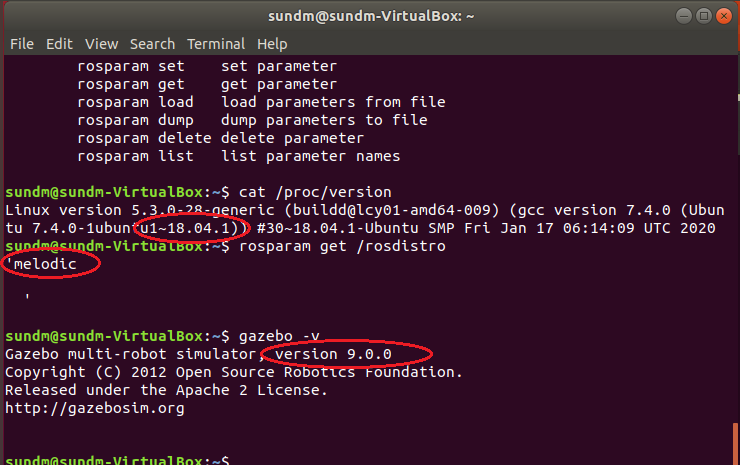
安装 的版本号最后可用使用相关命令查看:
cat /proc/version
rosparam get /rosdistro
gazebo -v
安装的过程出错 很多,有时候也不知道就修订好。过程是基于网络的教程,但是不同的版本会碰到 不同的错误。结果是,别人能装的,你不一定能装成功。
基本步骤如下,但不一定每人都是相同的:
参考:https://blog.csdn.net/qq_41450811/article/details/99079041
步骤一:添加镜像源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
步骤二:设置密钥:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
步骤三:安装
sudo apt-get update
sudo apt-get install ros-kinetic-desktop-full
步骤四:初始化并更新rosdep
sudo rosdep init
rosdep update
这里会出很多错误


搜索均能找到对应解决方法
最后安装成功

步骤五:加载环境设置
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
步骤六:安装其它有用的包
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
步骤七:初始化工作空间下载源码
参考:https://ismango.blog.csdn.net/article/details/107032569
/racecar_ws/src$ catkin_init_workspace
复制网上的代码
/racecar_ws/src$ git clone https://github.com/xmy0916/racecar.git
/racecar_ws/src
$cd ~/racecar_ws
步骤八:进行编译
/racecar_ws $catkin_make
出错
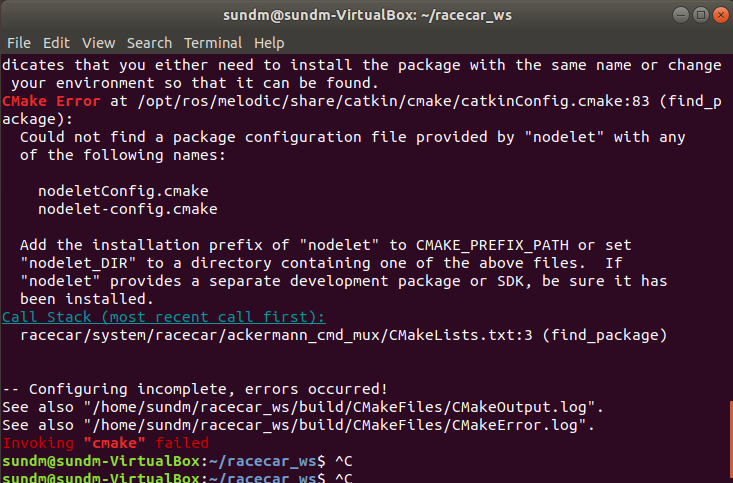
重新运行
sudo apt-get install ros-melodic-desktop-full --fix-missing
继续出错
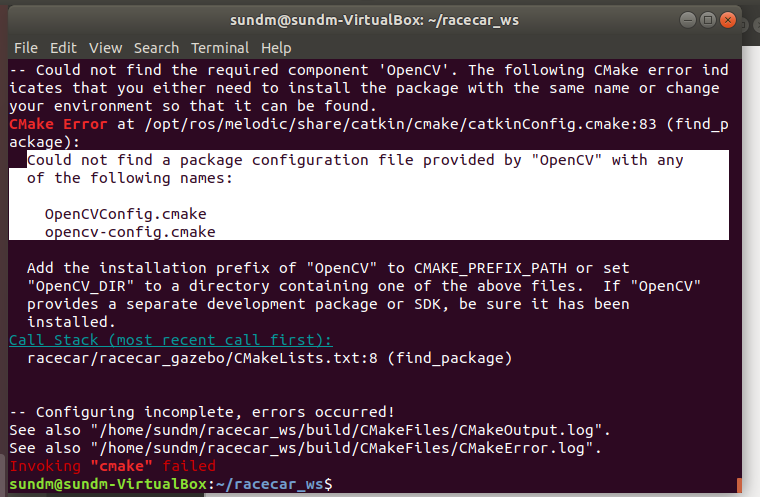
在CmakeLists.txt中添加:
set(OpenCV_DIR home/haha/opencv)
‘将模型文件库下载并放置到~/.gazebo/models
3. 系统启动
先运行 roscore,roscore是你在运行所有ROS程序前首先要运行的命令
/racecar_ws $roscore
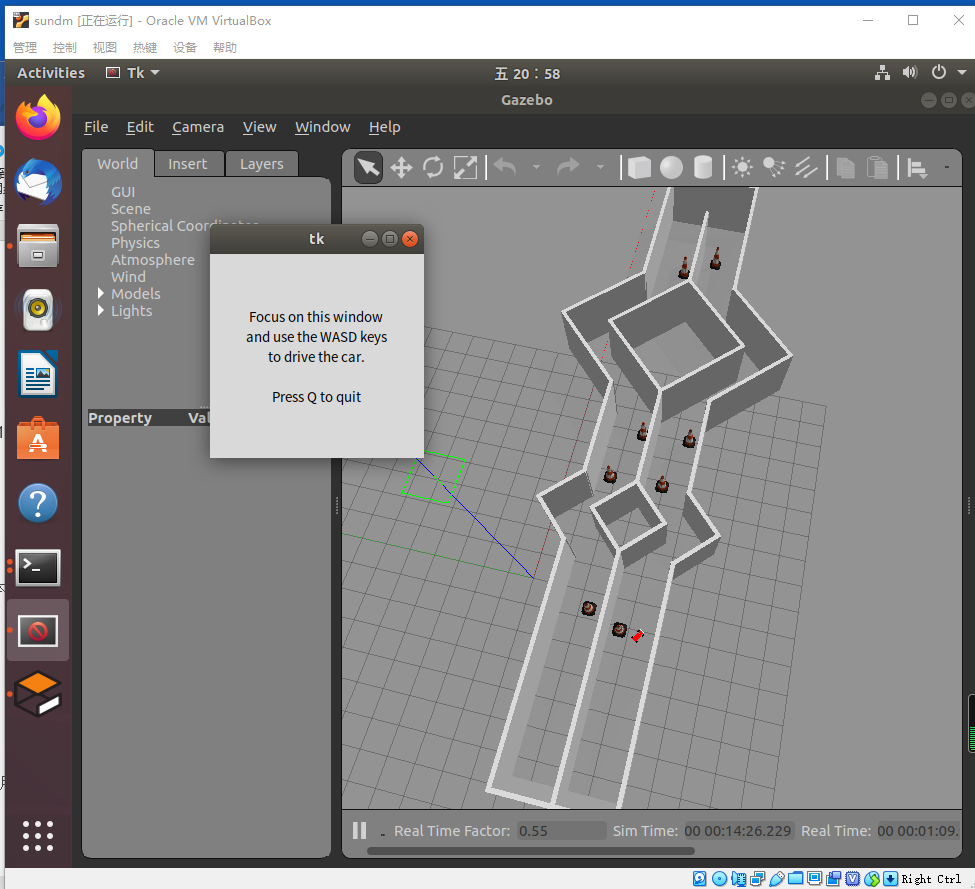
启动赛道和小车,打开launch
roslaunch racecar_gazebo racecar_runway.launch
出现错误
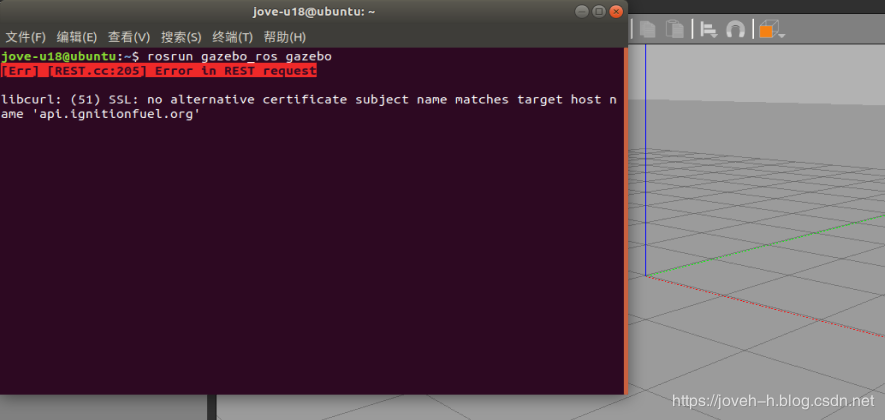
解决方法:
$ sudo gedit ~/.ignition/fuel/config.yaml
首先注释 url : https://api.ignitionfuel.org
然后添加 url: https://api.ignitionrobotics.org
运行成功
4. 总结
出的错误各种各样,但总能解决,需要的是恒心和毅力。这次移植过程是
先在原来的ununtu16.04上进行安装 ,出现名种错误无法解决,光ROS full安装就进行了5次,历时大约5小时。
其次在 vmware 上安装 ubuntu18.04, 居然黑屏,虚拟机不识别主机的显卡,于是各种重启,各种下载ubuntu, 一度甚至想进行双系统,历时4小时。
最后,在 Virtual Box 安装虚拟机,安装ubuntu 成功后,再进行 ROS 安装 ,最后再编译运行。每一步都有错误。历时大约5小时。
本次安装共进行了1整天,安装时要求网络好,电脑够快。

