
- 1vue3 + typescript 部分类型声明(refs, route)_vue3+ts type '(to: routelocationnormalized, from:
- 25.38 综合案例2.0 -语音助手(短信,蓝牙,M2M设备间通信)_asrpro-2m
- 3华为路由器支持ftp服务器,华为路由器FTP配置详解
- 4只要你有出发的勇气,哪里都是风景线(已更_只要你愿意走出来,哪里都能见到好风景
- 5JAVA中的父类私有成员变量的继承问题_java中父类的私有变量可以被子类继承吗
- 6AndroidStudio下载gradle失败问题解决_gradle安装失败
- 7逻辑回归 + GBDT模型融合实战!
- 8环境搭建---基于docker的rabbitmq_docker rabbitmq 127.0.0.1
- 9探索Gin框架:快速构建高性能的Golang Web应用_gin 框架
- 10新版本CSDN 如何编辑或修改文章和摘要_csdn博客发布后可以修改吗
STM8单片机变频器设计
赞
踩
变频调速技术是现代电力传动技术的重要发展方向,而作为变频调速系统的核心—变频器的性能也越来越成为调速性能优劣的决定因素,除了变频器本身制造工艺的“先天”条件外,对变频器采用什么样的控制方式也是非常重要的。随着电力电子技术、微电子技术、计算机网络等高新技术的发展,变频器的控制方式今后将向数字控制变频器等方向发展。现在,变频器的控制方式用数字处理器可以实现比较复杂的运算,变频器数字化将是一个重要的发展方向。
电动自行车的驱动电机即为BLDC电机,本文以STM8S903K3单片机为核心,完成了电动自行车控制器的软硬件设计,尤其对BLDC电机的直流变频控制部分进行了重点阐述。硬件部分包括电源、MOSFET驱动、电流检测等电路的设计,画出了各电路具体工作原理图,解释了其工作原理并介绍了硬件设计注意事项。软件设计采用分模块结构,详细介绍了电子换相、欠压保护和速度控制等编程要点,画出了各模块的程序设计流程图并介绍了软件设计注意事项。
最后,详细阐述了以STM8S903K3单片机为核心的电动自行车控制器的软硬件设计。硬件部分包括电源、MOSFET驱动、电流检测等电路的设计,画出了各电路具体工作原理图,解释了其工作原理并介绍了硬件设计注意事项。软件设计采用分模块结构,详细介绍了电子换相、欠压保护和速度控制等编程要点,画出了各模块的程序设计流程图并介绍了软件设计注意事项。
1.2电动自行车控制系统的研究现状
电动自行车控制器发展趋势及研究难点
论文研究内容和结构
无刷直流电机概述
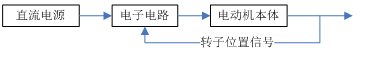
无刷直流电机控制系统概况
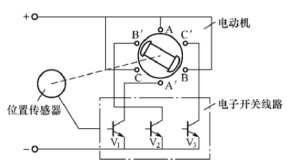
无刷直流电机的结构与工作原理无刷直流电机的结构


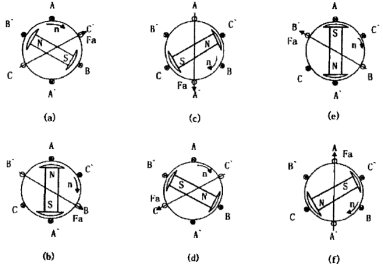
基本工作原理
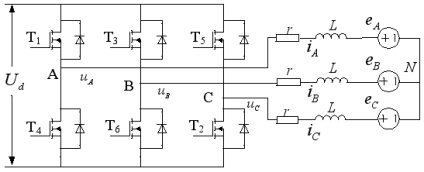
无刷直流电机的控制原理有位置传感器BLDCM控制原理

无位置传感器BLDCM控制原理

无刷直流电机控制技术研究现状
无位置传感器无刷直流电机的起动
无位置传感器无刷直流电机转子位置的检测
无刷直流电机转矩脉动抑制
无刷直流电机的控制策略问题
无刷直流电机的运行特性
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
起动特性
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

