
热门标签
热门文章
- 1环境安装 (angular+ionic+cordova+Vue)
- 2【考研】数据结构考点——堆排序(含408真题)_数据结构堆排序例题
- 32023第一届机器人与软件工程前沿国际会议_长沙理工大学阮昌
- 4AI大预言模型——ChatGPT在地学、GIS、气象、农业、生态、环境应用_chatgpt store
- 5git clone下载文件到指定目录_git clone 如何将repo直接下载到某个文件夹
- 6CentOS 8 Steam & Docker_hcs 安装工具 fcd hcsd
- 7WPS Office JS宏实现批量处理Word中的表格样式_wps宏编辑器
- 8ionic/cordova环境搭建_ionic和cordova环境搭建分析
- 9【大数据处理】广州餐饮店铺爬虫并可视化,上传至hdfs_如和将爬虫数据存储到hdfs
- 10千年庭院 -余秋雨
当前位置: article > 正文
android 陀螺仪滤波_Arduino+mpu6050陀螺仪运用卡尔曼滤波姿态解算实验
作者:IT小白 | 2024-06-11 15:52:07
赞
踩
android 进行陀螺仪姿态结算
MPU6050六轴陀螺仪
作用于四轴无人机,平衡车,机器人等等的电子实作当中,用于姿态判断,掌握了可以发挥自己的想象完成更多更有趣的作品。
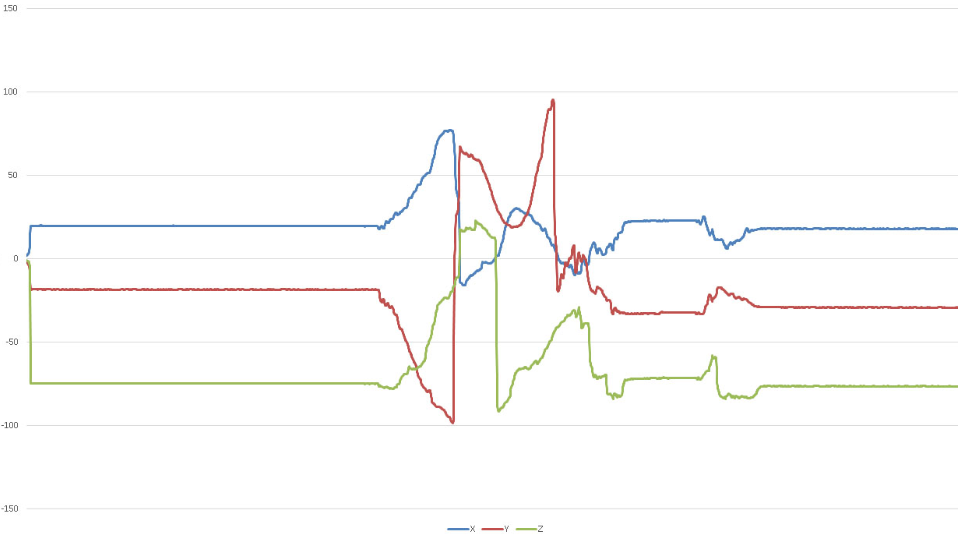
本例程输出XYZ的角度,正负90度。
运用卡尔曼滤波算法解算姿态,感觉算是比较稳定,但好像有点偏移。大家好好学习参考,再改进吧。
输出效果
首先看看本例程XYZ轴的输出效果图:
(时间曲线的体现是:静止姿态→摆动→恢复原静止姿态→拍动桌子→静止姿态)
Bom表
Arduino Uno *1
mpu6050 陀螺仪模块 *1
跳线 若干
MPU6050 引脚说明
VCC 3.3-5V(内部有稳压芯片)
GND 地线
SCL MPU6050作为从机时IIC时钟线
SDA MPU6050作为从机时IIC数据线
XCL MPU6050作为主机时IIC时钟线
XDA MPU6050作为主机时IIC数据线
AD0 地址管脚,该管脚决定了IIC地址的最低一位
INT 中断引脚
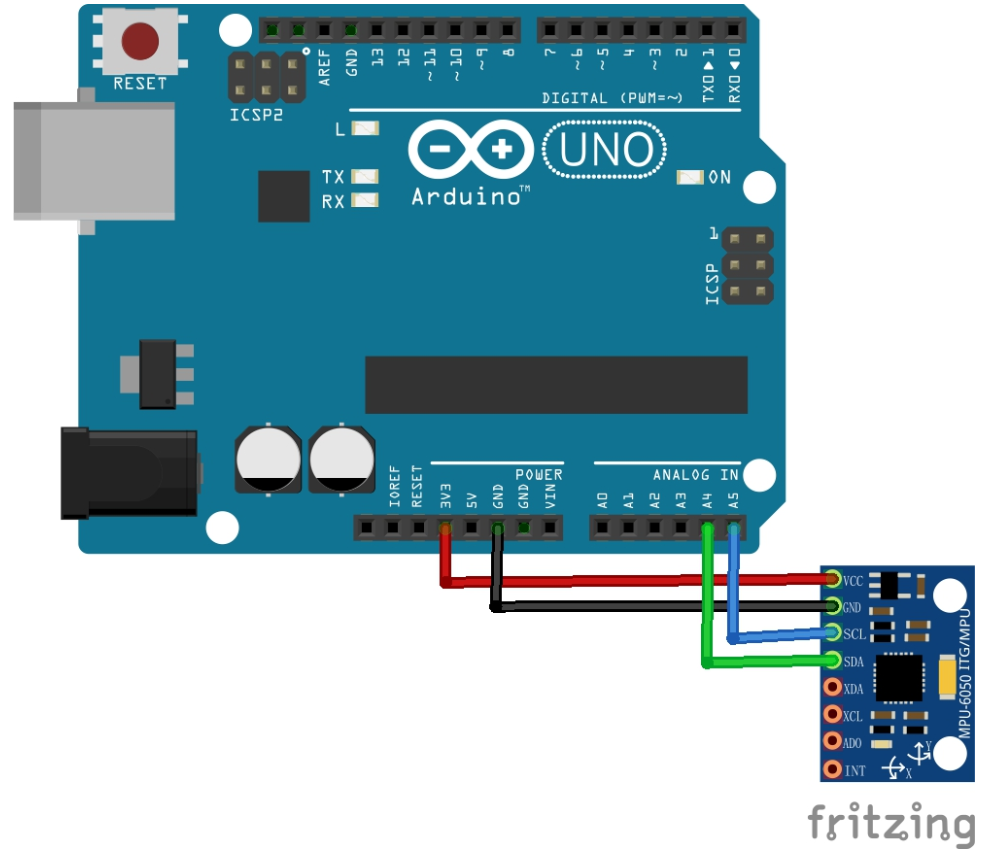
接线
Arduino uno+MPU6050接线方式如下
程序实现
首先要更新I2C库
在GITHUB找到的I2C库
打开,把Arduino文件夹里的I2Cdev,MPU6050文件夹复制到Arduino IDE的库文件夹里
(默认的路径是这个 C:\Program Files (x8
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/IT小白/article/detail/703812
推荐阅读
相关标签

