
- 1poi实现多个word文档合并,加超简单分页教程_poi合并word
- 2ncnn:提取所有层特征值
- 3git恢复rebase过程中遇到权限问题和丢失的提交_git reflog恢复
- 4区块链部署笔记(Centos7)包含fisco bcos与webase!_centos7 部署fisco bcos
- 5深入理解Python中的JSON模块:基础大总结与实战代码解析
- 6建筑类AIGC图像微调模型(LoRA)训练经验介绍
- 7Android APP自动化工具uiautomator2超详细环境搭建+例子演示_uiautomator2 安装(1)_安装uiautomator2
- 8【Gradle:新一代构建工具】学习笔记 3 Gradle进阶说明 3.30 拓展spring-boot-gradle-plugin插件
- 9moveit是如何控制机械臂运动的_moveit 控机械臂
- 10我用Python爬了4400条淘宝商品数据,竟发现了这些“潜规则”
PX4使用LC-302-GS光流模块调试(px4固件版本1.14)_lc302光流
赞
踩
光流是在淘宝上面搜索湖南优象科技光流,购买的LC-302-GS光流
LC-302-GS光流 :

接线图及安装:
光流模块的接线一定要按照引脚图来接线(否则容易烧掉)
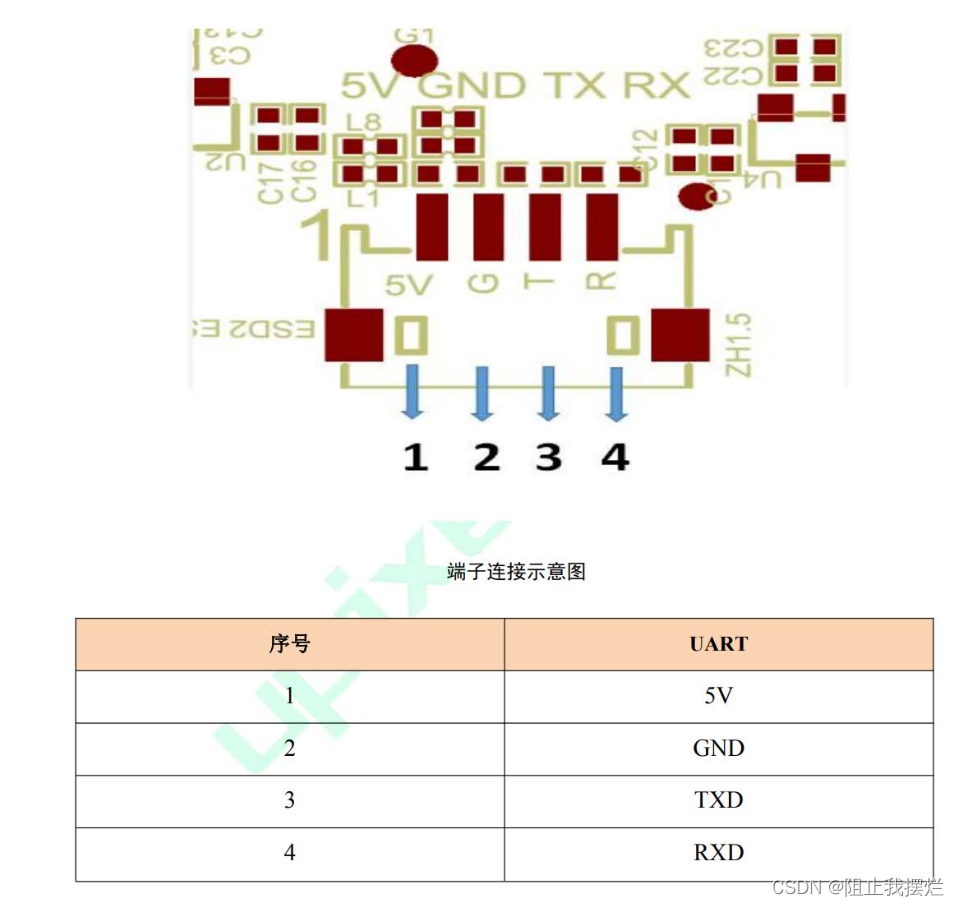
光流模块背面接口处是有引脚标识的

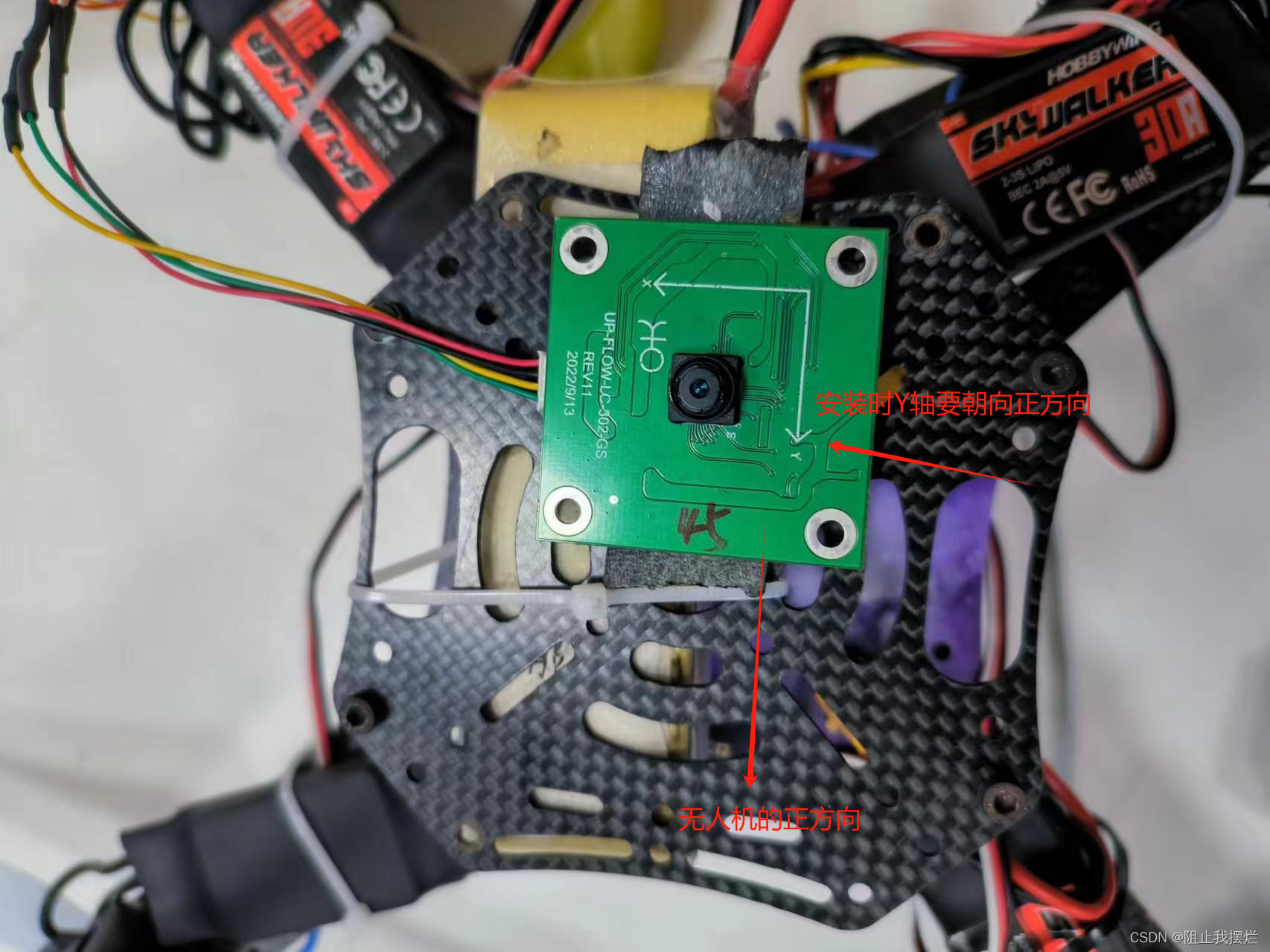
安装时LC-302-GS光流模块的Y轴应该朝向无人机的正方向(注意不要装反了)
在开始调试光流前要先用上位机切换协议:
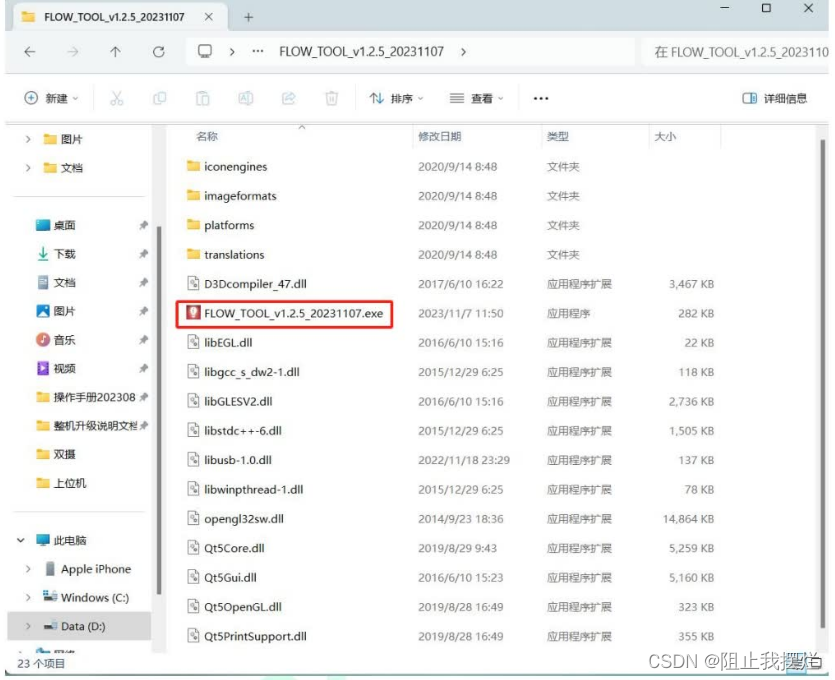
一、双击“FLOW_TOOL_v1.2.5_20231107.exe”打开上位机
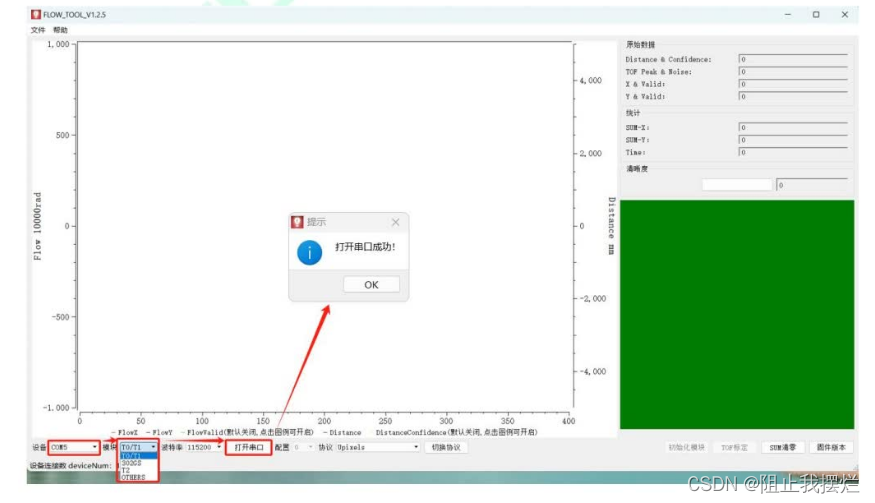
二、选择对应的“设备”,对应的“模块”,点击【打开串口】,提示“打开串口成功”。1、如果串口打开失败,可以尝试换一个串口板和连接线,也可以查看选择的设备是否匹配。
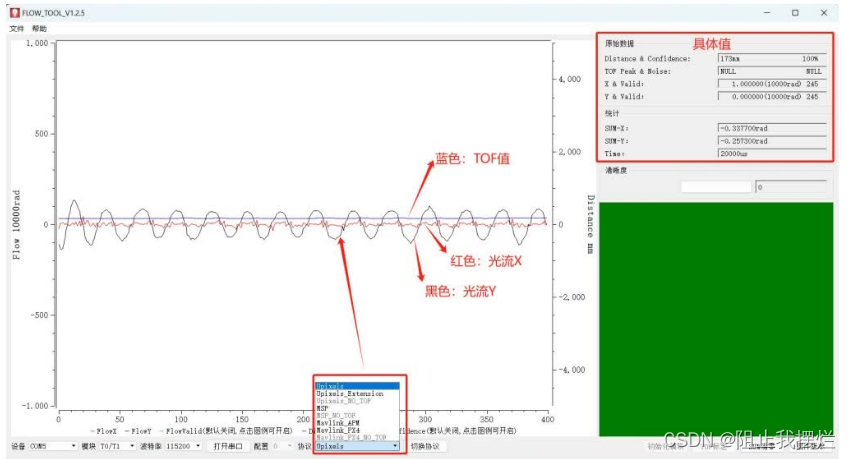
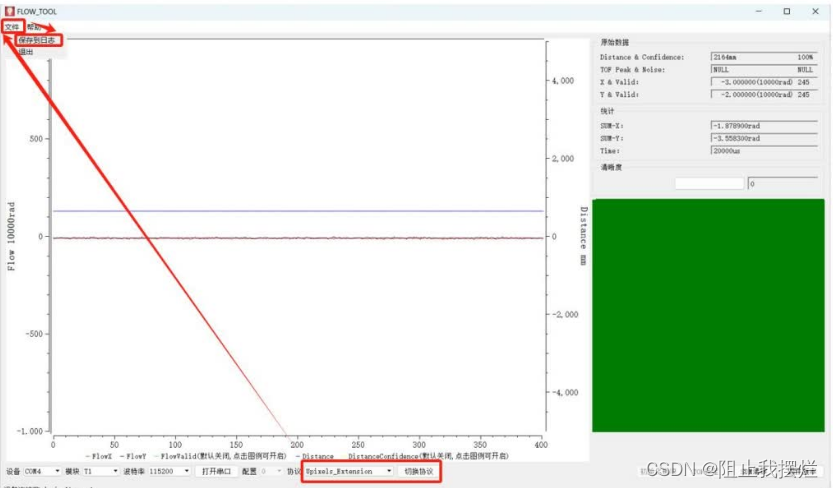
三、选择与模块匹配的“协议”,会自动输出波形,默认显示TOF和光流数据,蓝色波形为TOF值,红色波形为光流X,黑色波形为光流Y。右上角为具体值。1、要确认模块是什么协议:可以选择高亮的协议内容逐一排查,选择后有波形输出就代表是该协议;或者直接选择需要的协议,点击【切换协议】,切换成功后有波形输出即可。2、判断TOF可用:被测面和模块的距离正确。3、判断光流可用:用有纹理的被测物,如手掌、有字的书籍等,距离芯片10cm左右的位置,前后或左右均匀滑动,看到光流XY波形均匀有序的输出。
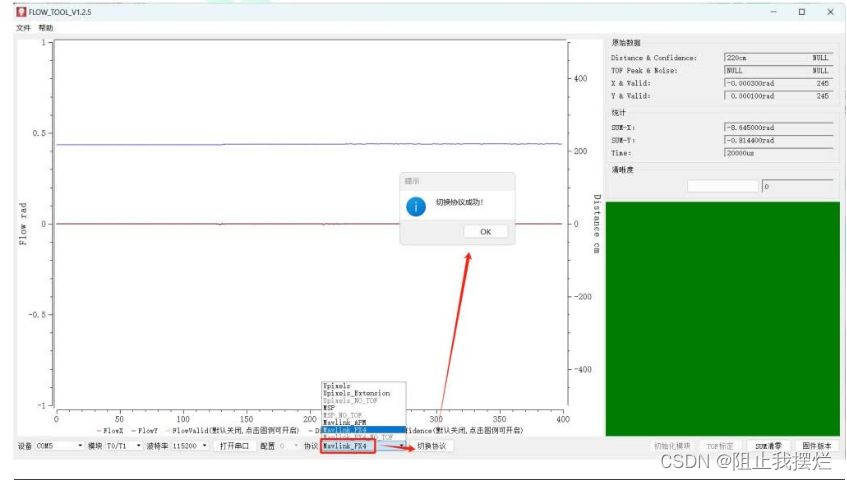
四、切换协议:如果本来是Upixels协议,要切成PX4协议。1、选择“Mavlink_PX4”,点击【切换协议】按钮,提示“切换协议成功”,波形正常输出。2、如果切换协议失败了,对模块重新上电后,打开软件再次切换。
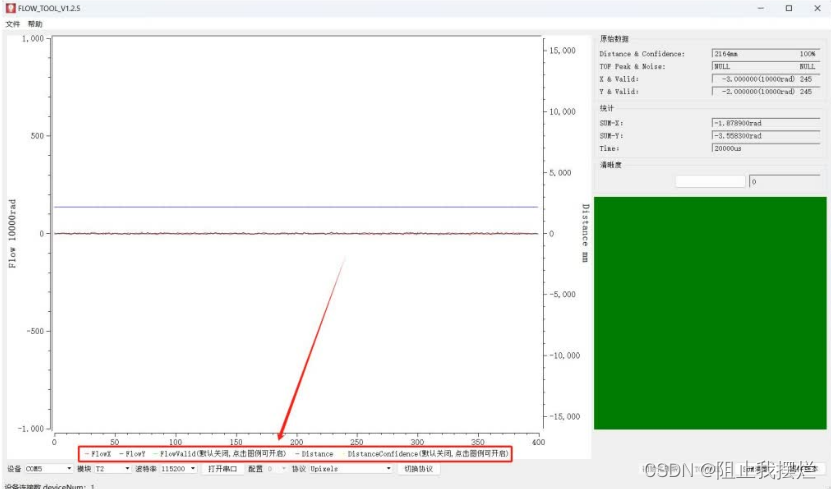
五、波形消失了,可点击对应的“图例”开启,点击一次“显示”,再点击一次“消失” 。
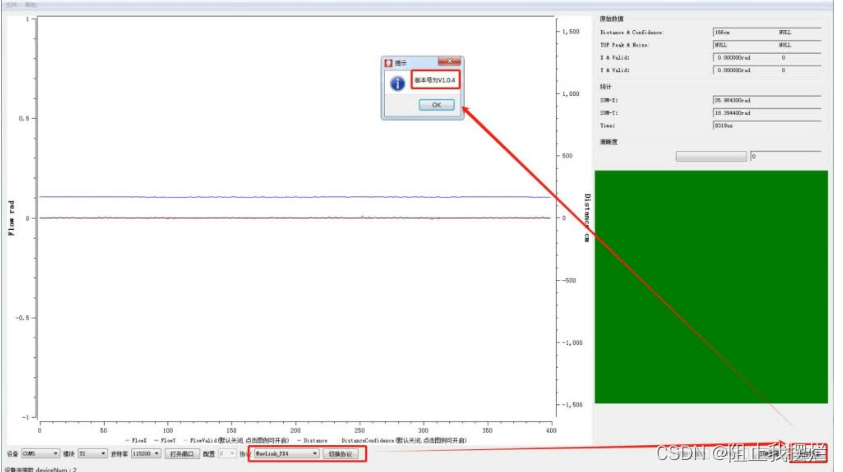
六、查看模块固件版本号1、切换成PX4协议:选择“Mavlink_Px4”点击【切换协议】,切换成功后点击【固件版本】,弹出具体的版本号提示框。
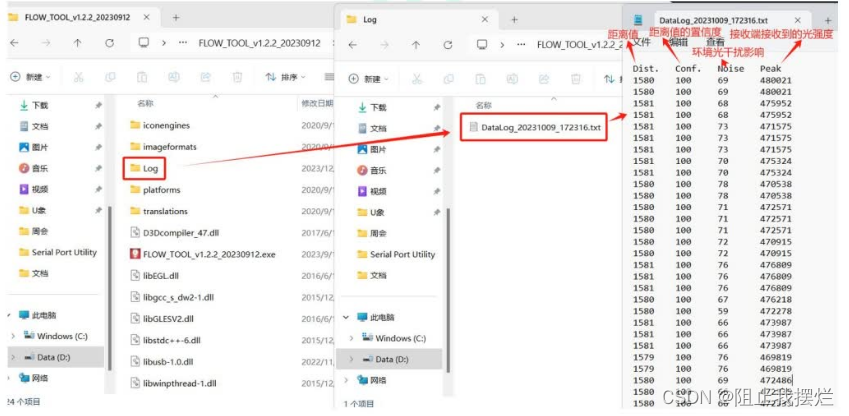
七、打印日志:TOF高低距离切换时,可以查看是否有中间值1、切换成优象扩展协议:选择“Upixels_Extension”点击【切换协议】;2、点击左上角“文件”,“保存日志”(从点击“保存日志”开始记录数据,到关闭程序截止);3、日志保存在应用程序的log文件夹下,根据时间查看最新的就是最后保存的日志。
切换好协议后就可以开始调试了。
开始调试:
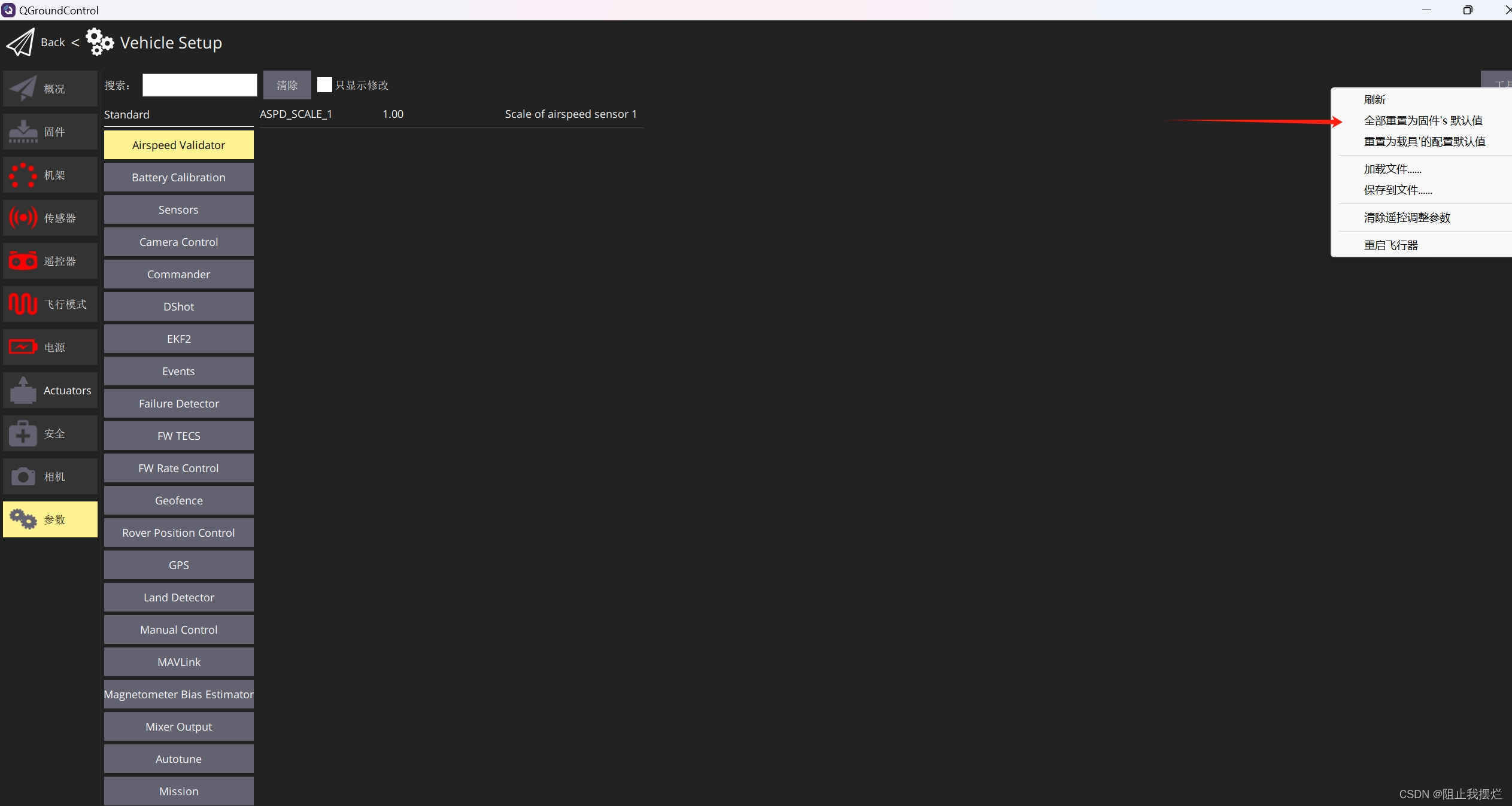
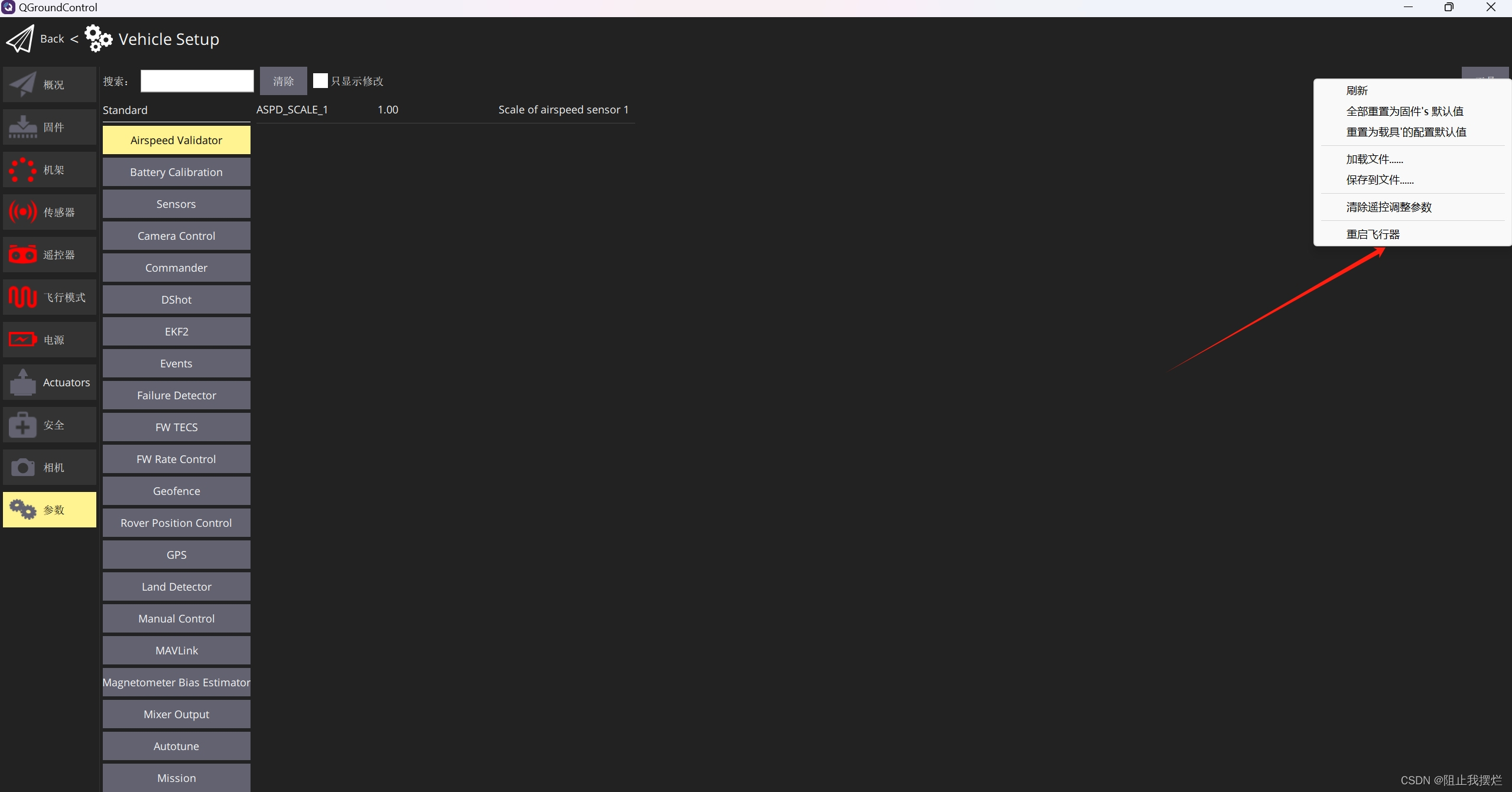
1.在开始任何配置之前,建议将 QGroundControl 地面站中的参数全部重置为固件的默认值,并重新启动飞行器。这样可以确保从一个干净的状态开始配置,避免之前的设置对新配置产生干扰。
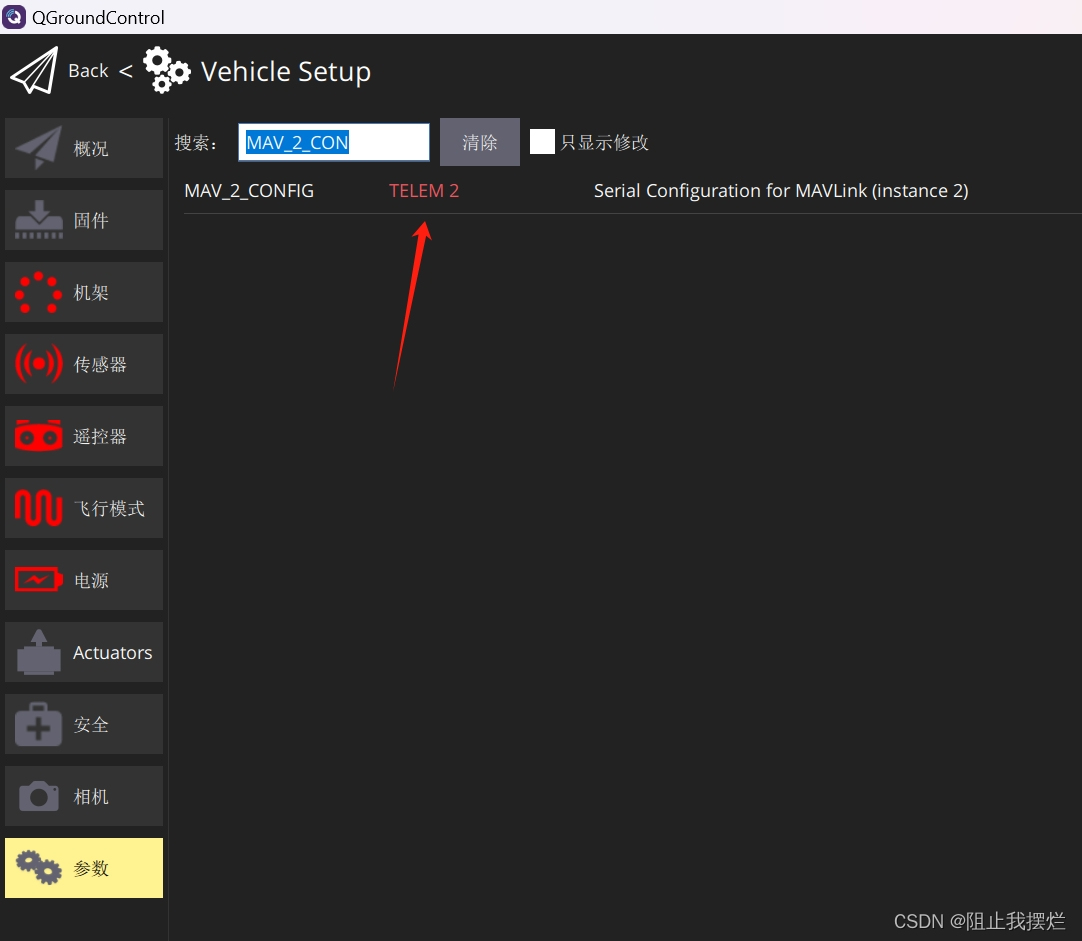
2.在地面站中搜索 MAV_2_CONFIG 参数,并将其配置为使用 TELEM 2 端口。MAVLink 协议的正确配置是确保飞行器与地面站之间通信的关键。修改后需要重新启动飞行器以使更改生效。
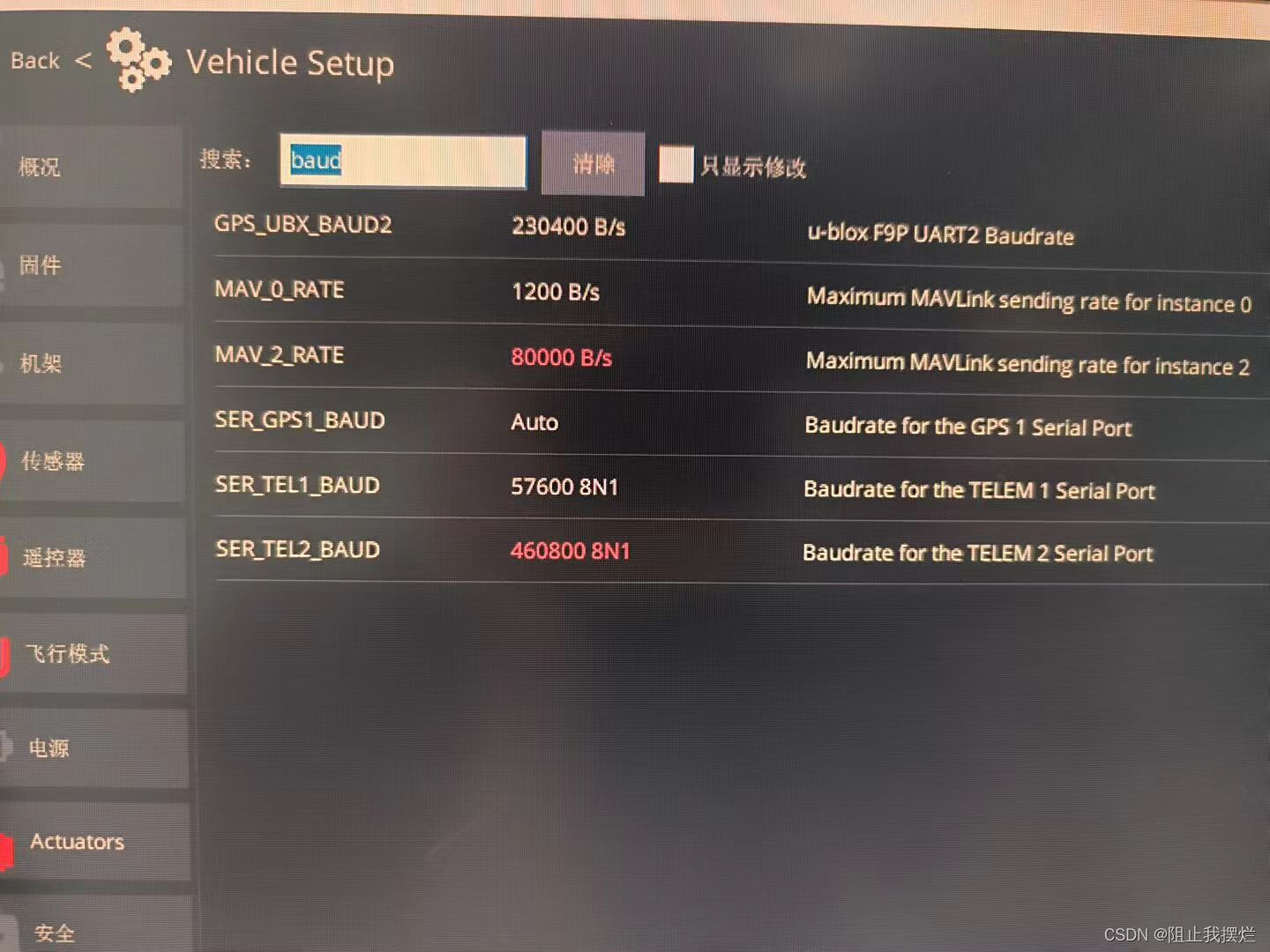
3.在地面站中搜索 BAUD 参数,并将 SER_TEL2_BAUD 波特率设置为460800(和UP-T2的波特率是不同的),这是一种常见的波特率设置,适用于大多数光流传感器。另外,将 MAV_2_RATE 设置为更高的数值,如80000,以提高传输数据的速率和精度。
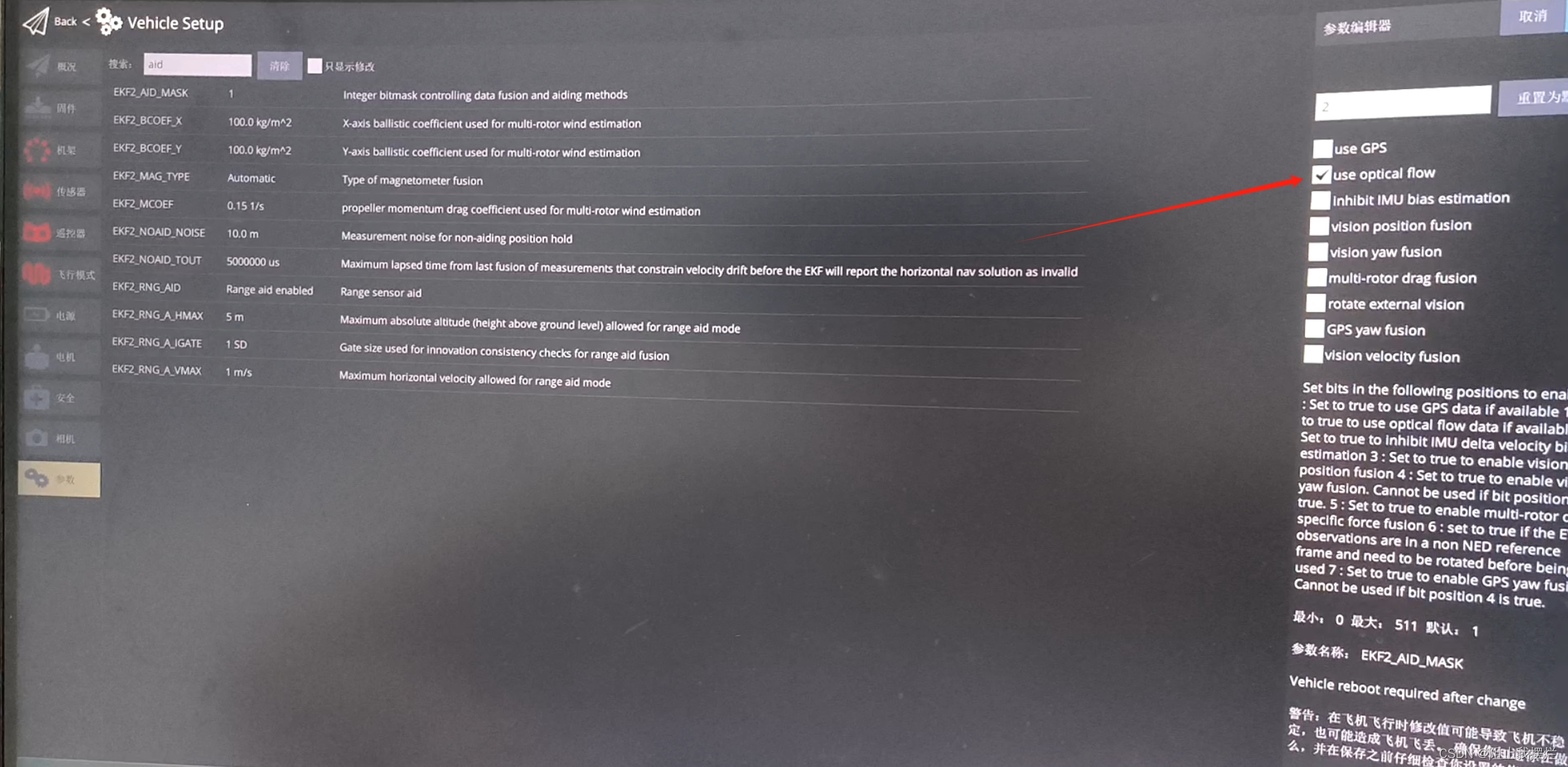
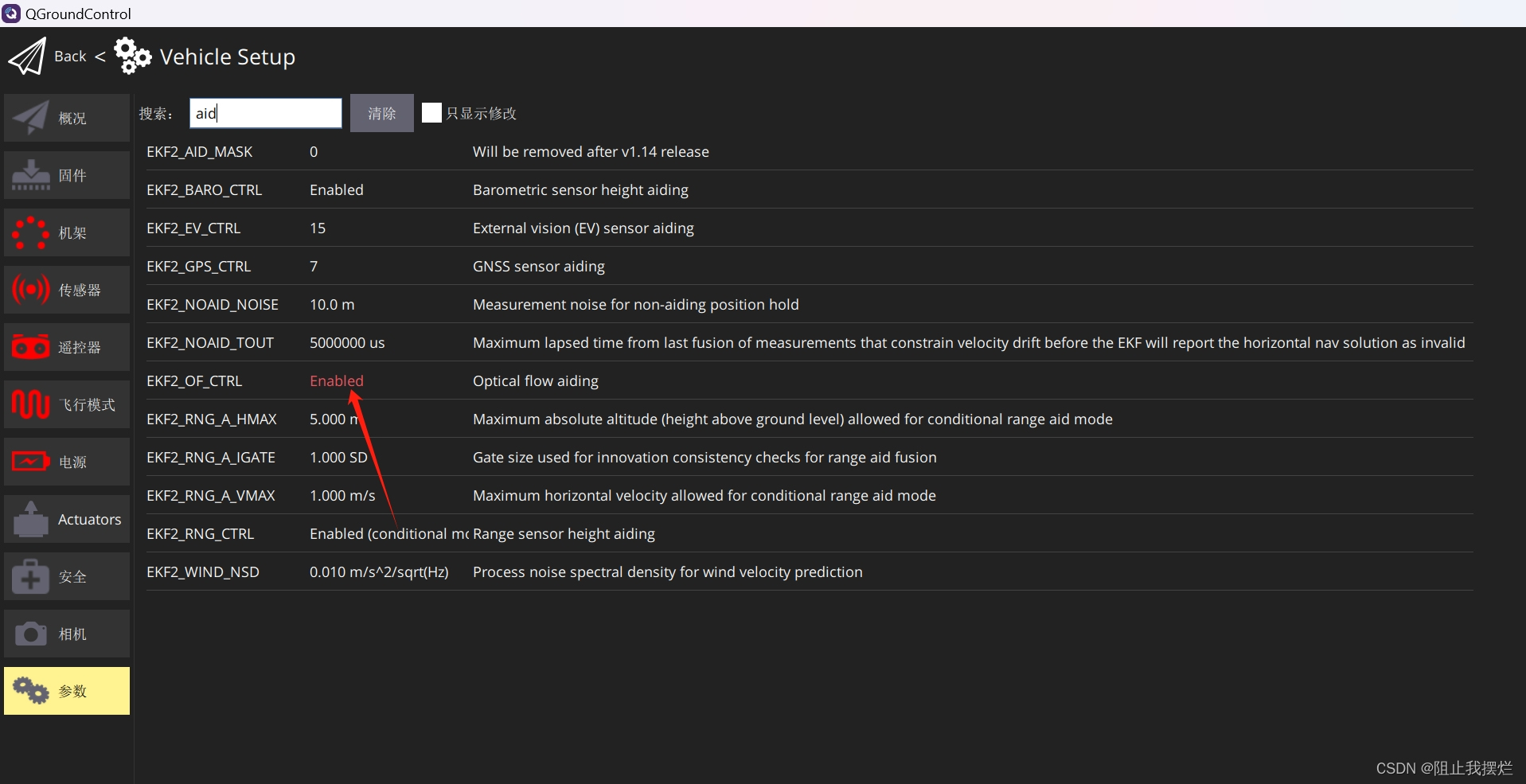
4.搜索aid找到 EKF2_AID_MASK 调整使用光流“use optical flow”,因为飞控的版本不一样,有些是单独打开光流的,在EKF2_OF_CTRL选择Enabled,打开光流辅助。(两张图分别是不同的版本)
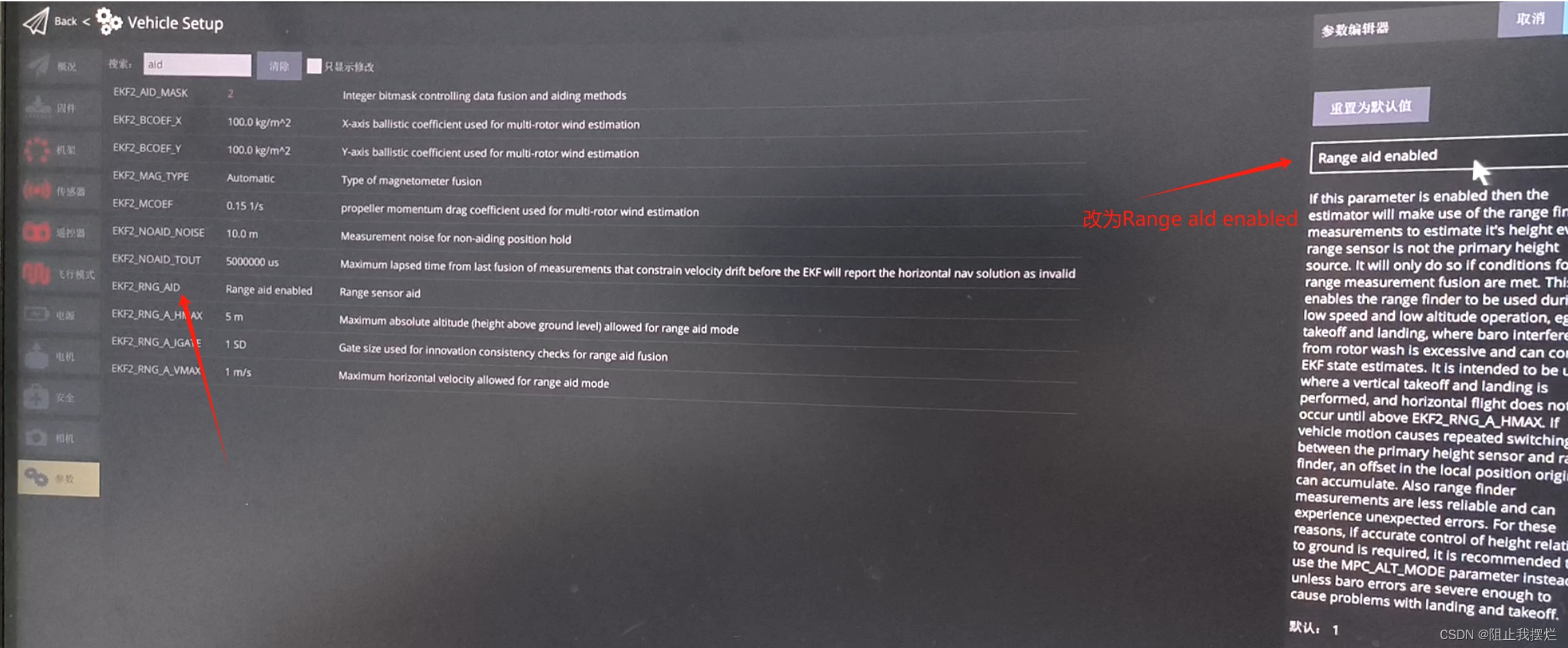
5.在地面站中找到 EKF_RNG_AID 参数并将其设置为 Range aid enabled,这将启用激光雷达数据的融合。激光雷达可以提供精确的距离信息,有助于提高飞行器在低高度环境下的稳定性和精度。
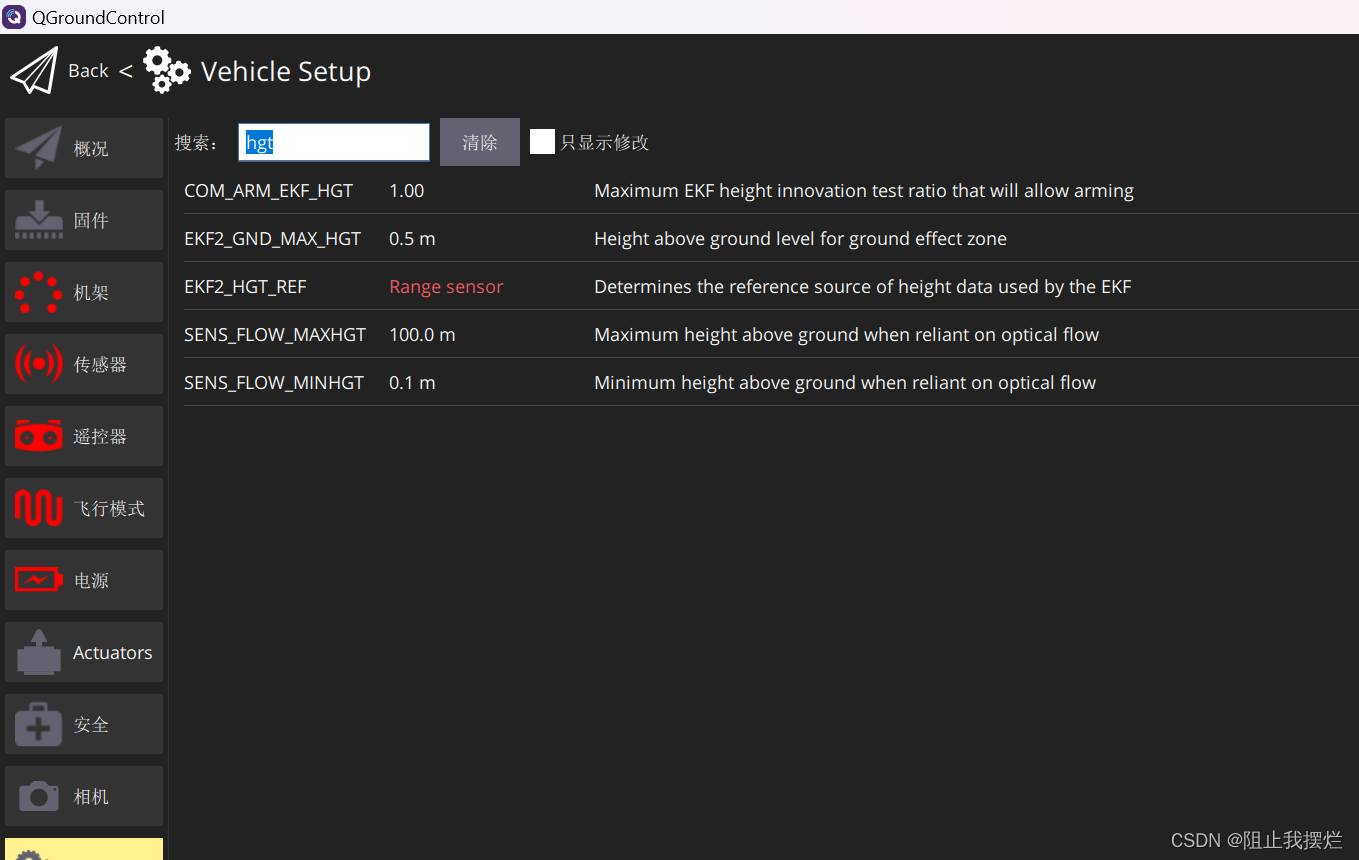
6.高度来源:搜索hgt ,找到EKF2_HGT_MODE ,选择Range sensor 激光雷达。
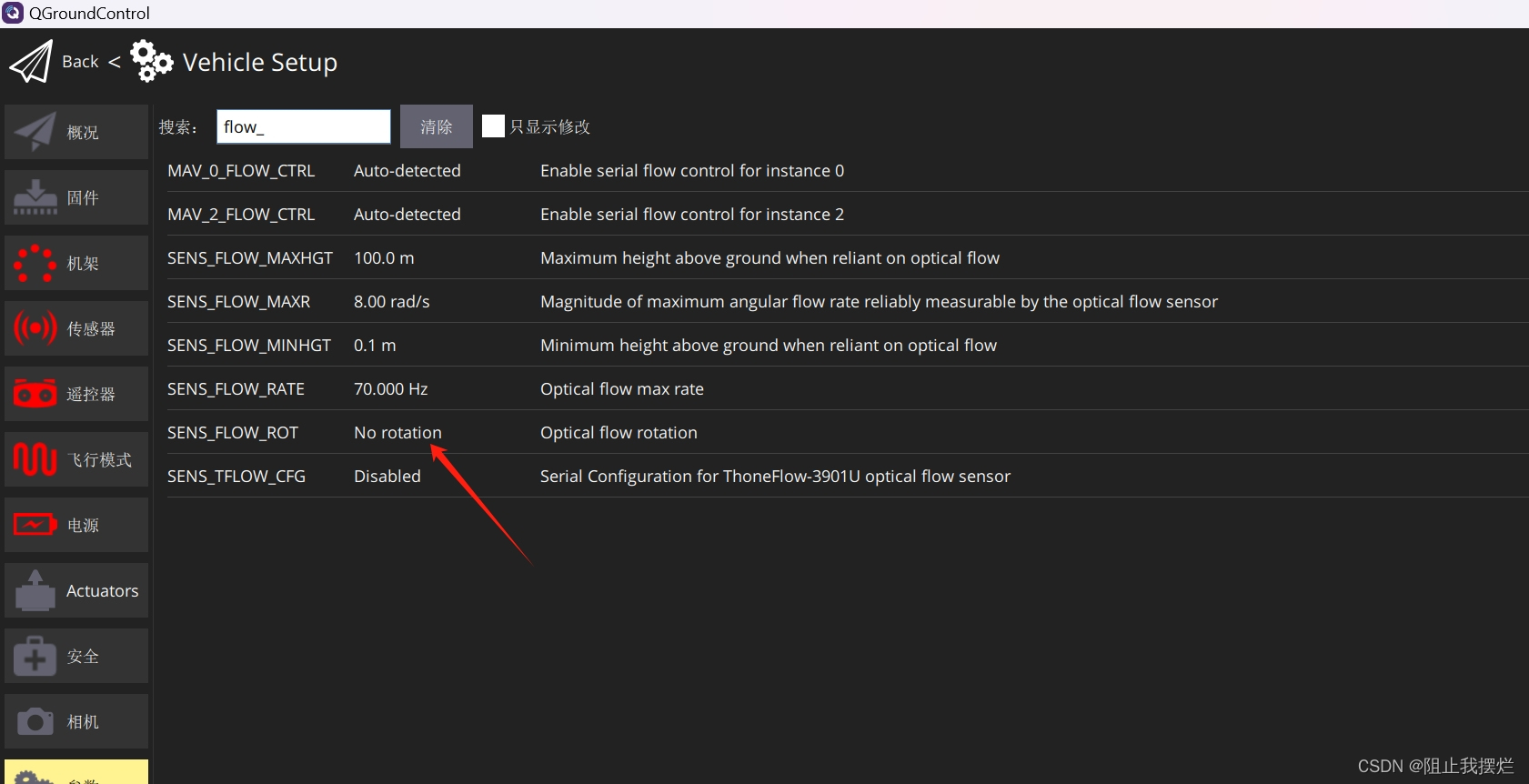
7.光流的安装方向:根据飞行器实际的光流传感器安装方向,调整 SENS_FLOW_ROT 参数。通常将其设置为 No rotation,但根据具体情况可能需要进行调整。确保光流传感器的安装方向正确可以保证其提供准确的运动信息。
8.完成所有参数调整后,务必重新启动飞行器以使配置生效。这样可以确保新的参数设置被正确加载并应用。
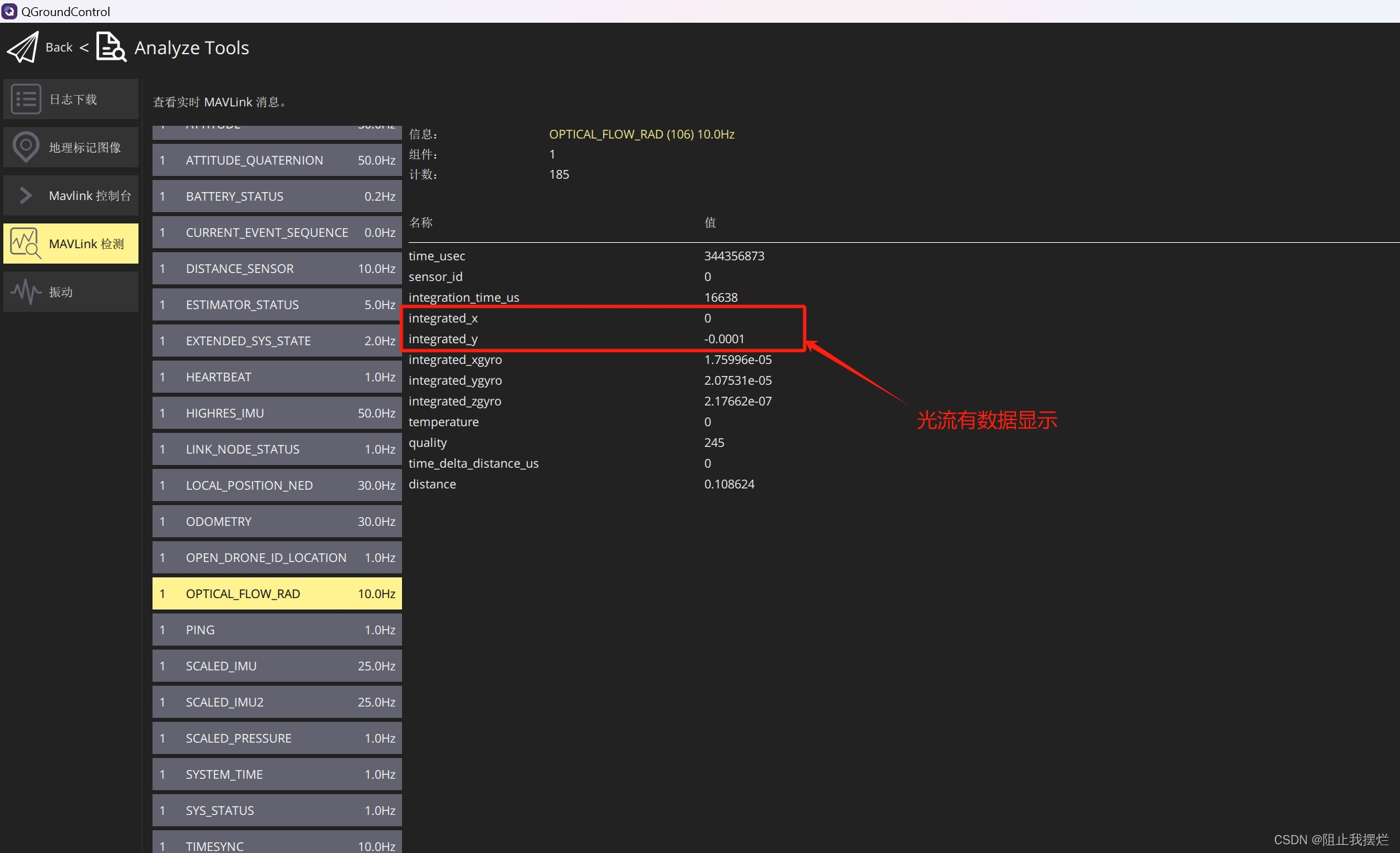
9.在地面站打开analyze Tools ,点击MAVLink检测,查看OPTICAL_FLOW_RAD,可以看到integrated_x,integrated_y有数据出来,这样光流就调试好了 。
效果展示:
WeChat_20240425005033

