- 1漫谈人工智能读后感
- 2Docker+Jenkins+Git+Maven自动化构建部署_docker jenkins gitlab maven 自动构建部署
- 3《人工智能》李开复版读书笔记_人工智能读书笔记
- 4Python爬虫实战,requests模块,Python实现拉勾网求职信息数据分析与可视化_requests 获取拉勾网城市数据
- 5风变python小课离线版_如果你不想求职被虐,务必学习Python这项绝技!
- 6虚拟机安装hadoop,hbase(单机伪集群模式)_hbase单机集群
- 7完整的模型训练套路(pytorch)_python训练模型
- 8css: animation关键帧动画_css 帧动画
- 9软件测试&性能测试&安全测试_性能安全测试
- 10哈夫曼编/译码器的设计与实现(结合文件)_哈夫曼编码译码器课程设计
碰撞检测算法之GJK算法
赞
踩
参考:
SAT 从 分离 的角度来判断物体间的碰撞,而 GJK 从 重叠 的角度来探索物体间的碰撞。
GJK是由Gilbert,Johnson,Keerthi 三位前辈发明的,用来计算两个凸多面体之间的碰撞检测,以及最近距离。GJK算法可以在O(M+N)的时间复杂度内,检测出碰撞,算法在每次迭代的过程中,都会优先选择靠近原点的方向,因此收敛速度会很快。算法的证明过程比较复杂,但是原理还是比较容易理解的。 GJK 是一种基于迭代的算法,其收敛速度取决于迭代方向
GJK 算法的核心逻辑是:给定两个多边形 p 和 q,以及一个初始方向,通过迭代的方式构建、更新单纯形,并判断单纯形是否包含原点,若包含原点则两个多边形相交,否则不相交。
1.1 GJK算法原理
GJK算法的结论是:如果两个多边形相交,那么这两个多边形构成的闵可夫斯基差集(Minkowski Difference),必然会包含原点。就像1.1节所示那样,差集的点,会分布在原点两侧。只不过这里的差集是一个多边形。
1.2 闵可夫斯基差集(Minkowski Difference)
用多边形A的所有点,减去多边形B中所有的点得到的一个点集合。
闵可夫斯基差集的意义在于,得到两个多边形顶点间的坐标分布关系,如果两个多边形相交,那么差集中点会分布在原点四周,也就是说差集会包含原点。
差集有一些特殊的性质,差集构成的多边形的形状与两个多边形之间的距离没有直接关系。两个多边形距离越大,则差集的中心位置离原点越远;反之,离原点越近。如果相交,则差集多边形会包含原点。
1.3 单形体(Simplex)
计算闵可夫斯基差集是一个非常麻烦的过程,所幸计算碰撞并不需要得到完整的闵可夫斯基差集多边形,我们仅需要计算出一个能够包含原点的差集多边形即可。对于2D空间,需要得到一个三角形;3D空间需要一个四面体。为了方便表示,我们把这样的差集多边形叫做单形体(Simplex)。
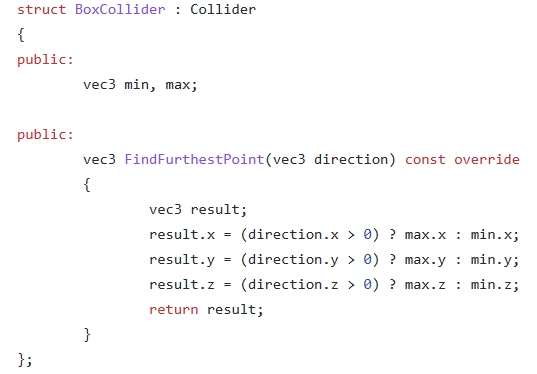
1.4 Support函数
为了方便表示,我们把单形体中的点,称作support点;把得到support点的方法称作support函数。support 函数的作用是计算多边形在给定方向上的最远点。support函数沿着某个方向,从两个多边形上找出距离最远的两个点,然后计算出差值。
如何寻找给定方向上的最远点呢?需要用到向量的点乘。我们可以遍历每个顶点和向量d的点乘,找到点乘值最大的顶点,它就是向量 d 方向的最远点。这个点也被称为支撑点。
为什么需要Support函数呢?这是因为在构建单纯形时,我们希望尽可能得到闵可夫斯基差的顶点,而不是其内部的一个点,这样产生的单纯形才能包含最大的区域,增加算法的快速收敛性。
2. GJK算法
2.1 GJK算法伪代码 & 算法步骤
伪代码:
- bool GJK(Shape shapeA, Shape shapeB)
- {
- // 得到初始的方向
- Vector2 direction = findFirstDirection();
- // 得到首个support点
- simplex.add(support(direction));
- // 得到第二个方向
- direction = -direction;
- while(true)
- {
- Vector2 p = support(direction);
- // 沿着dir的方向,已经找不到能够跨越原点的support点了。
- if (Vector2.Dot(p, direction) < 0)
- return false;
-
- simplex.add(p);
- // 单形体包含原点了
- if (simplex.contains(Vector2(0, 0)))
- return true;
-
- direction = findNextDirection();
- }
- }

算法步骤:碰撞检测算法之GJK算法 - 知乎 (zhihu.com)
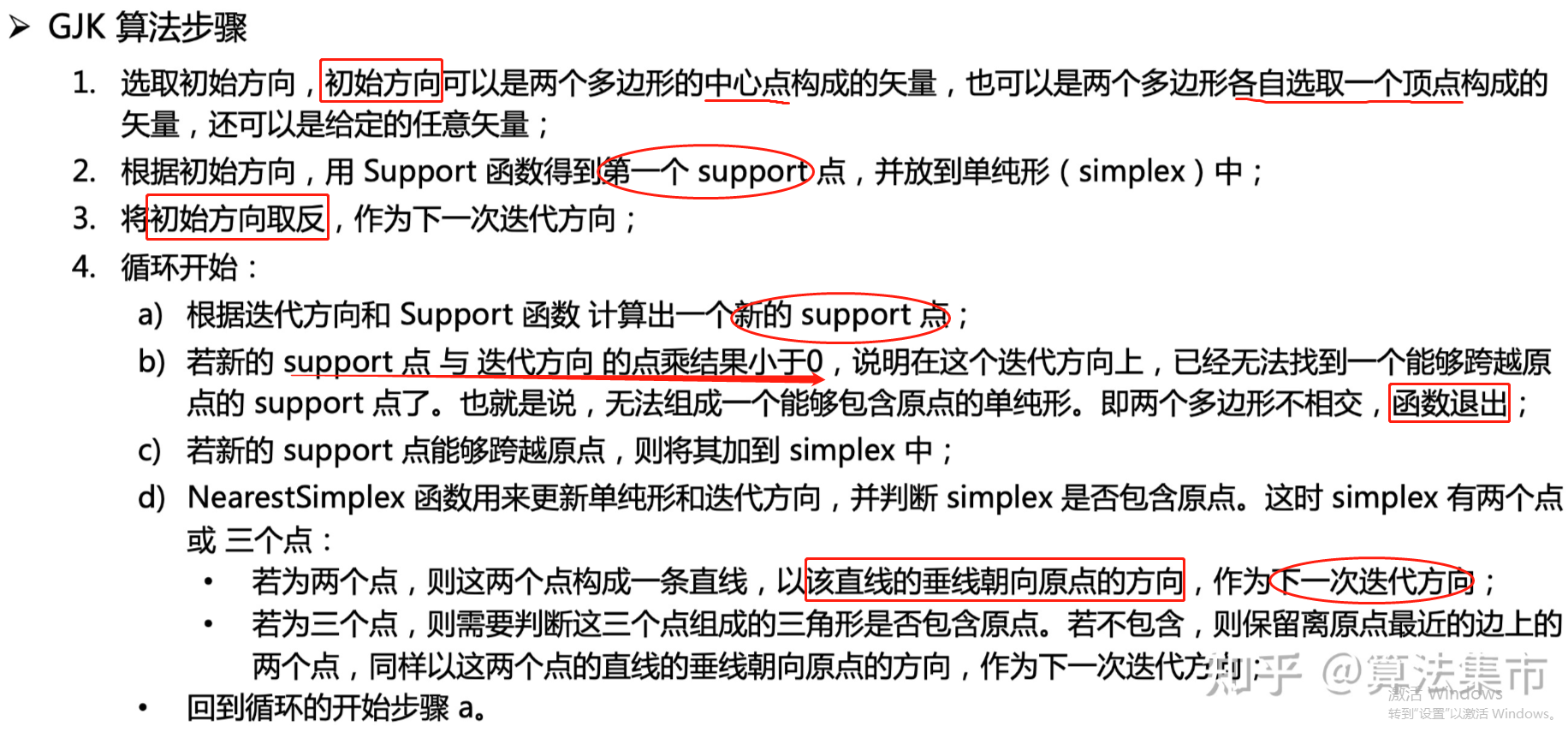
这里比较重要的是迭代如何终止,以及下一次迭代的方向选择,其他概念都比较好理解。下面用文字来解释一下算法核心步骤:
随机选取一个初始方向,用support函数得到第一个support点;
将初始方向取反,作为下一次的迭代方向;
迭代循环开始:
用support函数得到一个新的suppport点;
如果新的support点,在迭代方向上的投影小于0,说明在这个方向上,已经无法找到一个能够跨越原点的support点了。也就是说,无法组成一个能够包含原点的单形体了。则两个多边形不相交,检测到此结束;
如果support点达到3个,用这3点组成三角形,如果包含原点,说明发生了碰撞,检测到此结束;
否则,仅保留离原点最近的support边上的两个support点;
此时,将仅剩的两个support点构成一条直线,计算直线的垂线。并选垂线取朝向原点方向,作为下一次的迭代方向;
跳转到步骤3。
这里比较难理解的是第b步,此时的单形体存在两种情况:
首次进入循环,单形体中只有一个初始的support点。如果投影小于0,说明沿着背离初始点的方向,无法找到一个能够跨越原点的support点了。也就是说,该点和初始点都在原点的同一侧;
非首次进入循环,单形体中只有两个support点了,迭代方向是由步骤8生成的,该方向是垂直于单形体中剩余两个support点构成的直线。如果投影小于0,则说明单形体中仅剩的两点,已经是最接近原点两个support点了。同时这两点构成的线段,就是闵可夫斯基差集中最接近原点的边,该边是计算两个多边形最近距离的关键,下一章中会用到这条边。
需要注意一个特殊情况,步骤e中,如果原点恰好就在两个support点构成的直线上,说明原点就在闵可夫斯基差集的边界上。也就是说,两个多边形刚开始发生碰撞。
2.2 算法细节
(1)判断三角形是否包含原点
判断一个点是否在三角形内部 - 知乎 (zhihu.com)
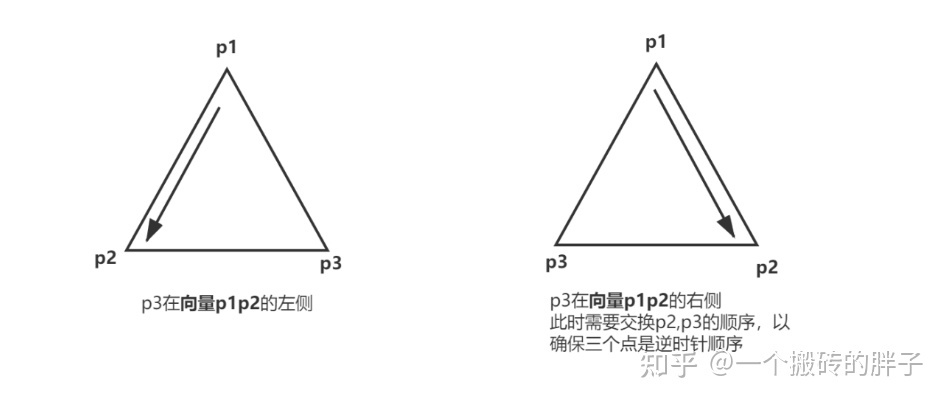
若点O在三角形内部,则沿着三角形的边逆时针走,点O一定保持在边的左侧。如图示,点在逆时针行走时,在AB,BC,CA的左侧。

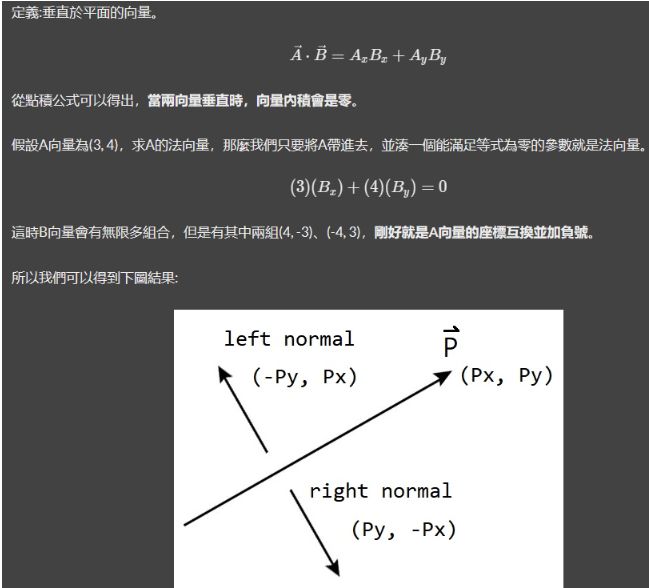
如何判断点在一个边的左侧呢?可以借助向量叉乘来判断O是否在向量AB的哪一侧。通过计算向量AO与向量AB的叉乘的值为正,则表示O在AB的左侧,反之为右侧。
向量的叉乘可以用来判断点P是在向量AB的左侧还是右侧。判断一点是否在三角形内部 - 知乎 (zhihu.com)


其运算结果仍是一个向量,我们记之为向量c,它的模定义为:

其中θ为向量a和向量b的夹角,如上图所示,
c的模:即以a和b为两条边的平行四边形的面积;
c的方向:即a和b构成平面的法向量,c的方向定义为垂直于a和b所构成的平面,并且a,b和c构成右手螺旋定则,也就是右手四指方向从a转向b,大拇指即得到c方向。
- #include <iostream>
- #include <math.h>
- using namespace std;
- struct Point {
- double x;
- double y;
- };
- double product(Point p1,Point p2,Point p3) {
- //首先根据坐标计算p1p2和p1p3的向量,然后再计算叉乘
- //p1p2 向量表示为 (p2.x-p1.x,p2.y-p1.y)
- //p1p3 向量表示为 (p3.x-p1.x,p3.y-p1.y)
- return (p2.x-p1.x)*(p3.y-p1.y) - (p2.y-p1.y)*(p3.x-p1.x);
- }
- bool isInTriangle(Point p1,Point p2,Point p3,Point o) {
- //保证p1,p2,p3是逆时针顺序
- if(product(p1, p2, p3)<0) return isInTriangle(p1,p3,p2,o);
- if(product(p1, p2, o)>0 && product(p2, p3, o)>0 && product(p3, p1, o)>0)
- return true;
- return false;
- }
- int main() {
- Point p1,p2,p3,o;
- cin >> p1.x >> p1.y;
- cin >> p2.x >> p2.y;
- cin >> p3.x >> p3.y;
- cin >> o.x >> o.y;
- bool flag = isInTriangle(p1,p2,p3,o);
- if(flag) puts("Yes");
- else puts("No");
- }
判断若p3在p1p2→的右侧!则表示输入的点的顺序是顺时针的,即A,C,B式的输入,将p2、p3调换位置即可保证顺序是逆时针。
(2)迭代结束条件
GJK 是一种 迭代算法,它需要不断地检测单纯形是否包含原点。它退出迭代的条件是
单纯形包含原点
单纯形最后添加的顶点与搜寻方向点乘小于0
(3)2D求垂线
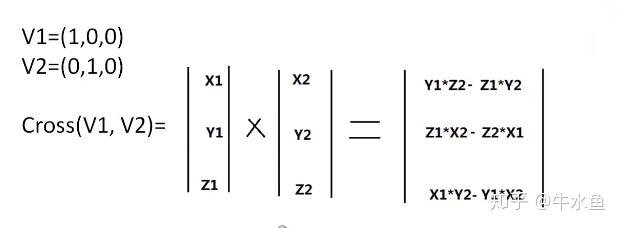
3D:叉积(cross)得到的向量其实是一个垂直向量,垂直于两个进行叉积的向量构建的平面。
(4)找一条边面向原点的法向量方向
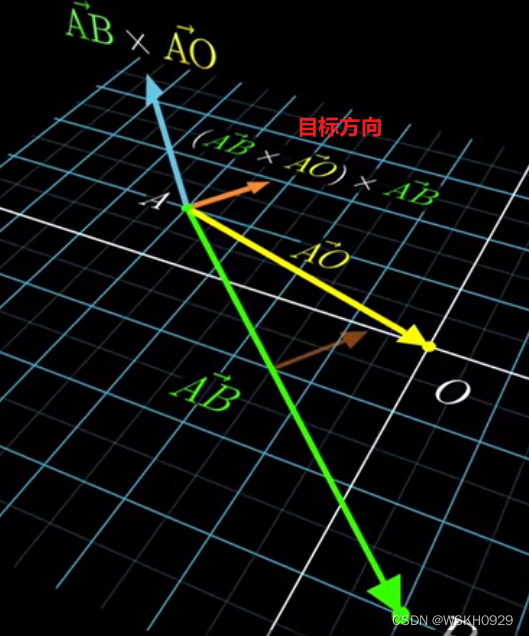
这种方法被称为矢量三重积

具体方式:

首先我们定义两个向量 AO 和 AB,如下图所示

我们可以通过 AO 和 AB 的叉乘,找到他们的所在平面的法向量方向,如下图所示

然后再将上一步的结果和 AB 做叉乘,就可以得到指向原点的目标方向。
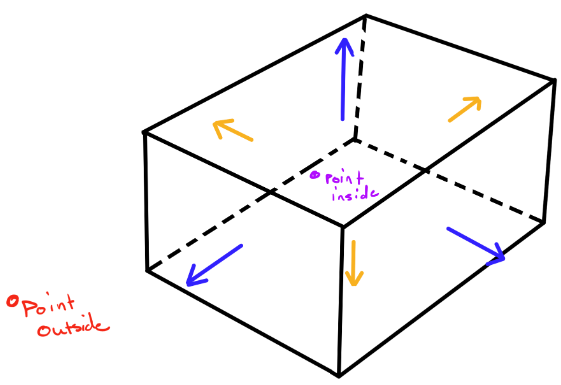
(5)判断点是否在立方体内部
Rotated Region3: Rotated Boxes in 3D Space - Scripting Helpers
判断点在平面的哪侧:这就意味着,如果投影是负的我们就知道两个向量之间的角差大于90°这就意味着我们在平面下面。另一方面,如果投影是正的那么我们就知道角差小于90°并且我们在平面上方。最后,如果我们的投影是0,那么我们就知道给定的点实际上在平面上。

判断点是否在立方体内部:现在我们知道了如何判断一个点在平面上的哪一边,下一步就是把这个知识应用到我们旋转的区域上。概念很简单,我们用六个面法线都背离立方体中心的平面来定义一个立方体。这样,我们就可以对照所有6个平面来检查任意给定的点,如果有一个点在这6个平面某一个的“上方”,则点在区域外,如果这个点均在这6个平面的“下方”,点就在区域内。
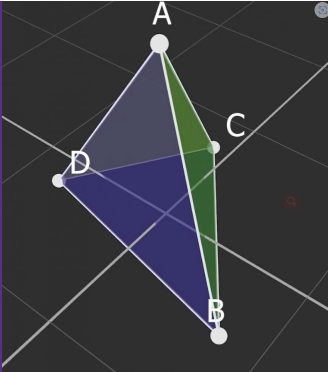
(6)找四面体离原点最近的面
step1:根据右手螺旋定则,找到三个面的法向量(法向量方向为背离立方体中心的平面);
step2:然后依次判断原点O在每个面的哪侧,如若在ABC面的外侧,则原点更接近ABC,用它作为新的单纯形;如果原点在所有面的内侧,则它一定在四面体内部,表明两个物体发生碰撞。
3. 3D code代码实现
code1
博客:Winter's Blog,github:IwEngine/IwEngine/include/iw/physics/impl at master · IainWinter/IwEngine (github.com)
code2
一个文件:gjktest/testopengl.cpp at main · matan45/gjktest (github.com)
code3
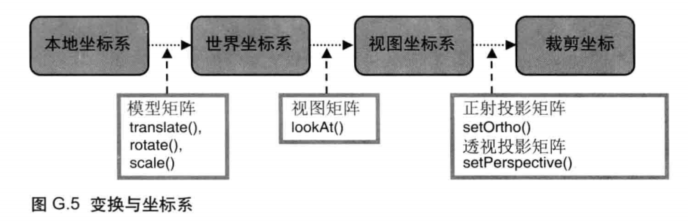
translate()原理
使用Vec3.transformMat4转换本地坐标为世界坐标,结果为2倍的本地坐标? - Creator 3.x - Cocos中文社区