
- 1java web 配置servlet_javaweb中Servlet配置到Tomcat
- 2go 携手 ffmpeg_go ffmpeg
- 3【c++】虚函数描写叙述符override
- 4LAMP(Ubuntu 18.04)安装jdk13,Tomcat详细操作_ubuntu18安装java13
- 5Talk预告 | 悉尼科技大学在读博士生胡思逸:MARLlib,全新的多智能体强化学习框架_悉尼科技大学常晓军
- 6FPGA常见接口及逻辑实现(一)—— UART_常见的fpga可以实现的接口有哪些
- 7USB 设备常见问题_usb枚举失败
- 8Vue3前端访问后端API的两个配置(axios中的baseURL与vite.config.js中的proxy)_vue后端baseapi设置
- 9一遍就会!Stable Diffusion 文生图最全、最强教程!
- 10阿里平头哥数字IC验证笔试题_64比特的无符号数
深入学习!58页精彩PPT解读《机器人未来技术研判》
赞
踩

来源:数字化企业
- 文章信息 -
本文作者:中国科学院院士、华中科技大学学术委员会主任丁汉院士。资料引用来自AI工业、华中科技大学出版社机械分社等。
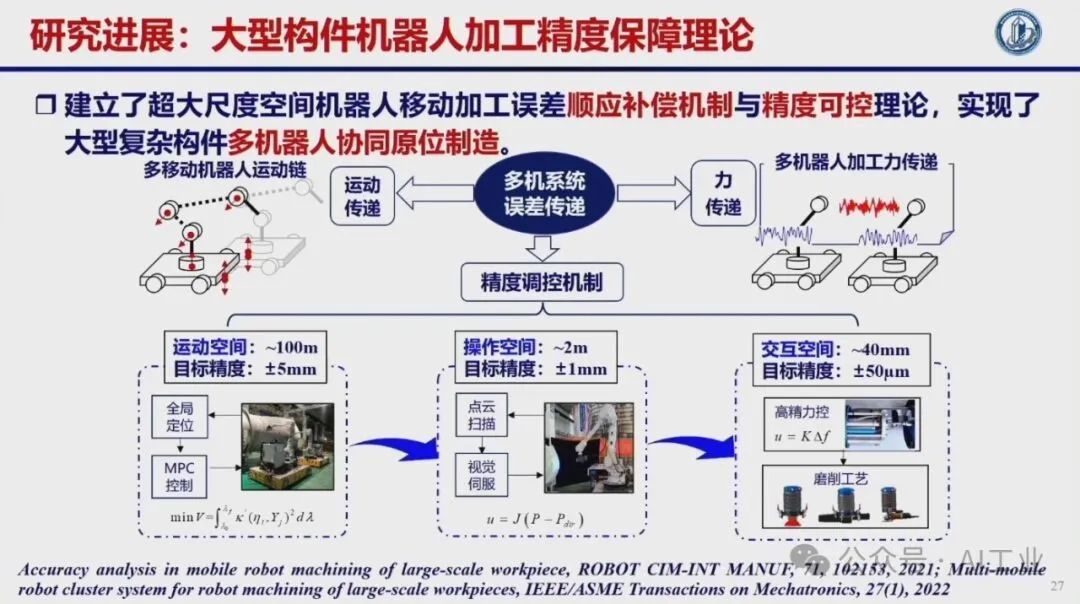
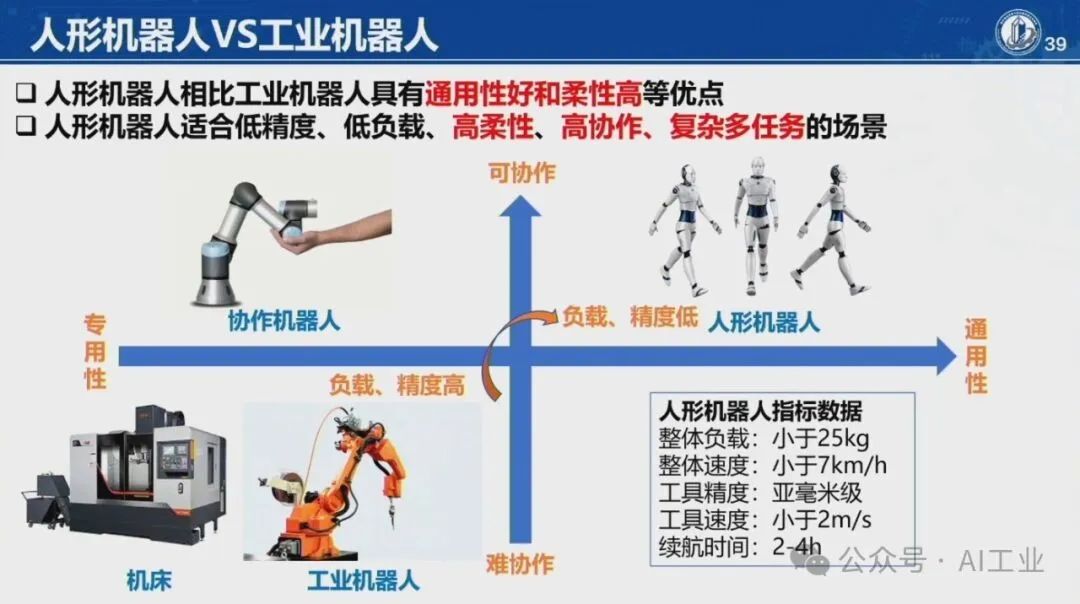
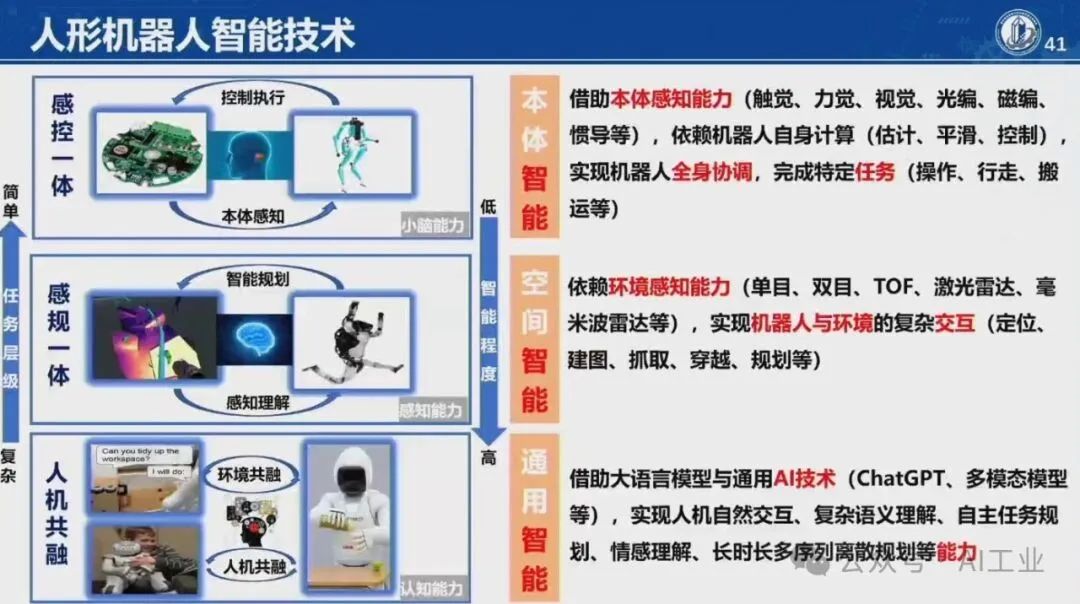
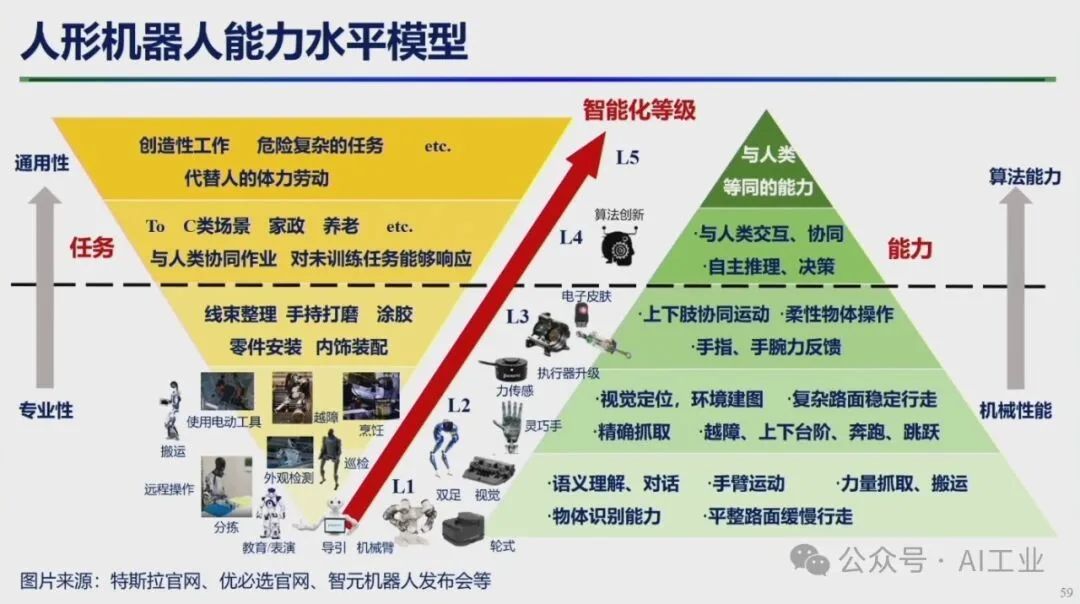
丁汉院士表示,人形机器人具有通用性好和柔性高等优点,适合低精度、低负载、高柔性、高协作、复杂多任务的场景,主要在军事应用、航空航天、工业制造和家庭服务等领域。目前人形机器人离场景应用尚有距离,但基于大量科研攻关和技术研发,未来将有理想的产业机遇。

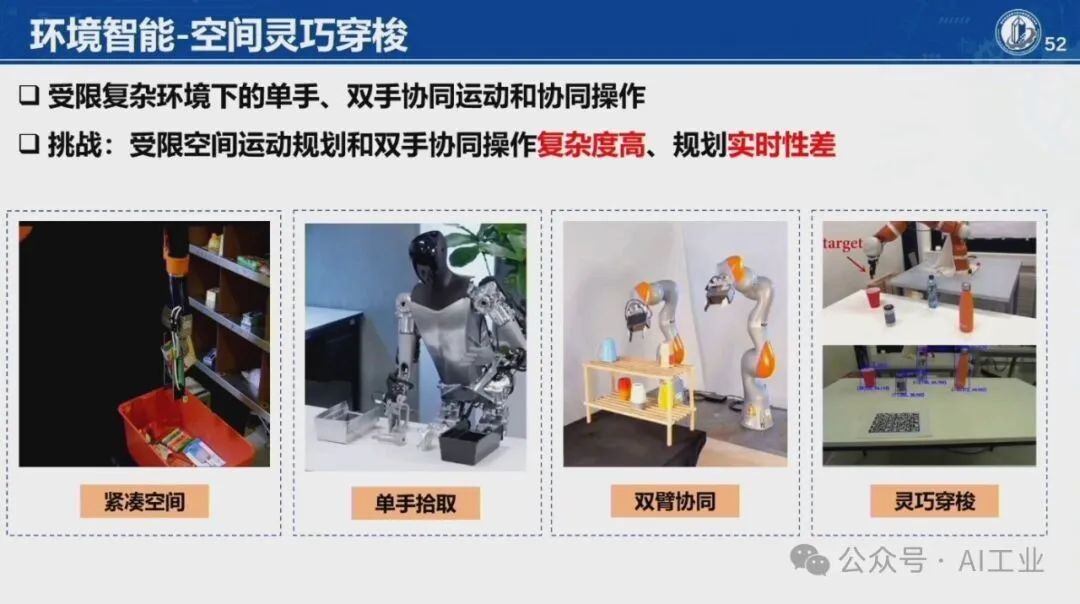
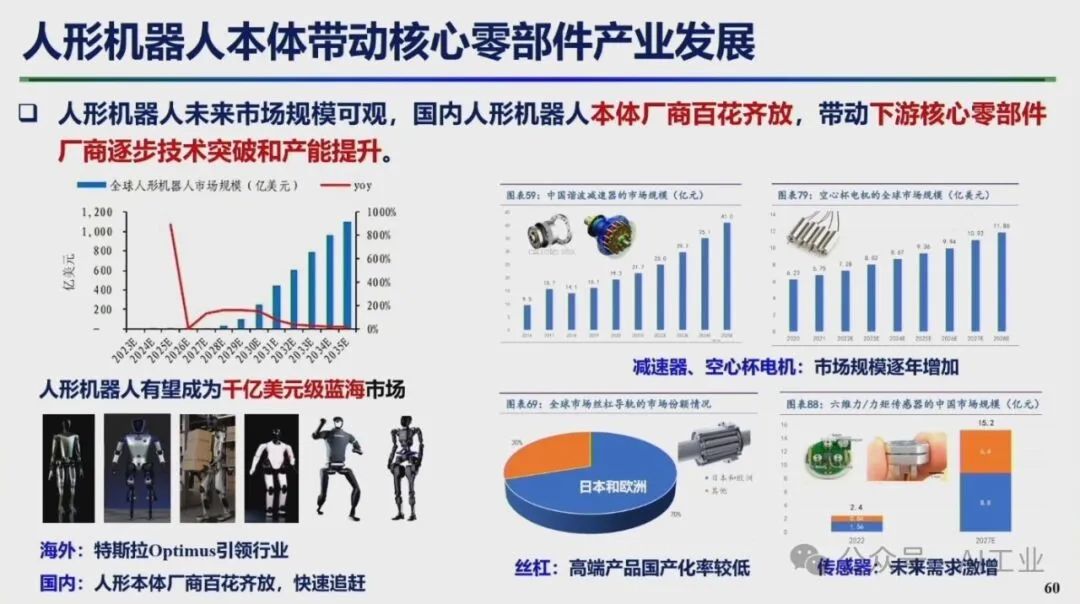
人形机器人智能技术程度由低到高分为本体智能、空间智能和通用智能。硬件系统包括机械本体、传感系统、伺服系统和控制系统等,整体产业链仍不成熟。人形机器人可持续高质量发展硬件水平至关重要。本体智能中核心技术-通用抓取,灵巧手结构设计、触觉传感抓取规划依赖于新结构、新材料、新算法的发展。模仿人达到敏捷快速、响应灵活、动作多样、适应顺形自如仍是长期而艰巨的任务。因此,灵巧手是人形机器人迈向通用化最核心的技术之一。在环境智能复杂空间通行,规划实时性和可靠性差,算法的瓶颈急需加强数学和物理等基础理论研究。
人形机器人需要政府引导、企业探索、全产业链协同、高校研发投入、专业人才加大培养,形成政产学研用,贯穿研发、孵化、转化、投融资服务等关键链条,有效提升科技成果转移转化成效,推动人形机器人创新赋能经济高质量发展。
以下为精彩PPT内容











































未来智能实验室的主要工作包括:建立AI智能系统智商评测体系,开展世界人工智能智商评测;开展互联网(城市)大脑研究计划,构建互联网(城市)大脑技术和企业图谱,为提升企业,行业与城市的智能水平服务。每日推荐范围未来科技发展趋势的学习型文章。目前线上平台已收藏上千篇精华前沿科技文章和报告。
如果您对实验室的研究感兴趣,欢迎加入未来智能实验室线上平台。扫描以下二维码或点击本文左下角“阅读原文”


