
热门标签
热门文章
- 1基于Python实现前端自动化打包部署_python 自动化部署
- 2一文了解 HDFS 及其组成框架_hdfs是什么技术框架
- 3如何使用Kali远程桌面访问Windows 10或11_kali远程控制windows
- 4智能体——父亲兴趣爱好助手
- 5【面试必备】非关系数据库的优缺点及四大分类,附带学习经验_非关系型数据库
- 6使用workbench写SQL语句-初级_workbench查看表信息
- 7Spark 概述以及与Hadoop的关系_spark属于hadoop组件吗
- 8基于单片机的老人防摔倒的设计与实现_基于单片机的老人跌倒检测装置
- 9平衡二叉树的使用_有一批学生信息,存储在文件stuinfo.txt中,学生信息的格式为: (学号(12位,关键字项
- 10基于lora技术对Gemma(2B)大模型的微调实践_gemma2b 微调
当前位置: article > 正文
Python|A*算法解决八数码问题_第1关:a*搜索求解8数码问题
作者:Li_阴宅 | 2024-07-03 23:00:24
赞
踩
第1关:a*搜索求解8数码问题
一、A*算法概述
如果使一般搜索过程满足如下限制,则它就成为A*算法:
(1)把OPEN表中的节点按估价函数f(n)=g(n)+h(n)的从小到大进行排序;
(2)代价函数g(n)是对g*(n)的估计, g*(n)>0。 g*(n)是从初始节点S0到节点x的最小代价;
(3)启发函数h(n)是h*(n)的下界,即对所有的n均有:h(n)≤h*(n) 。h*(n)是从节点n到目标节点的最小代价,若有多个目标节点,则为其中最小的一个。 通过n的最佳路径:f*(n)=g*(n)+h*(n)最小的路径,即从S出发,通过节点n的,到达目标节点的代价和最小的路径。


- 欧几里得距离 ( Euclidean distance)也称欧式距离,它是一个通常采用的距离定义,它是在m维空间中两个点之间的真实距离(直线距离)。
- 出租车几何或曼哈顿距离(Manhattan Distance)是由十九世纪的赫尔曼·闵可夫斯基所创词汇 ,是种使用在几何度量空间的几何学用语,用以标明两个点在标准坐标系上的绝对轴距总和。
- 切比雪夫距离(Chebyshev distance)或是L∞度量,是向量空间中的一种度量,二个点之间的距离定义是其各坐标数值差绝对值的最大值。
说明
- A*寻路算法要解决的问题就是在有障碍物的情况下,如何快速找到一条到达目的节点的最短路径。
- 注意:在寻找F值最小的时候可能会出现不止一个节点的情况,此时处于节省寻路时间的考虑,选择最后放入open list的节点。因为最后放入open list的节点是上一个处理节点的邻居节点,从而保证寻路时的连贯性,不会出现在寻路过程中突然跳到另外的地方重新开辟一条新路径。
疑问
- 但如果h(0)=0,则A*算法退化为Dijkstra算法,虽能保证得到最优路径,但算法效率低?
一点见解:Dijkstra始终找【从起始点到某结点最短的路径】而未考虑到终点的那一段。
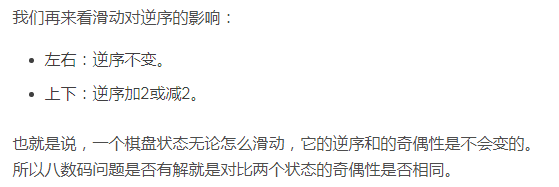
- 将九宫格变成线性后,计算初始状态和目标状态的奇偶性是否一致,一致有解,否则无解?
八数码问题是否有解
解释如下:
二、Dijkstra算法和A*算法比较
- Dijkstra算法计算源点到其他所有点的最短路径长度,A*关注点到点的最短路径(包括具体路径)。
- Dijkstra算法建立在较为抽象的图论层面,A*算法可以更轻松地用在诸如游戏地图寻路中。
- Dijkstra算法的实质是广度优先搜索,是一种发散式的搜索,所以空间复杂度和时间复杂度都比较高。对路径上的当前点,A*算法不但记录其到源点的代价,还计算当前点到目标点的期望代价,是一种启发式算法,也可以认为是一种深度优先的算法。
- 由第一点,当目标点很多时,A*算法会带入大量重复数据和复杂的估价函数,所以如果不要求获得 #具体路径# 而只比较路径长度时,Dijkstra算法会成为更好的选择。
与其他算法的比较
利用A*算法进行路径规划
状态空间搜索策略
三、解决八数码问题
#结点
class Node:
def __init__(self,parent,state,Fn,Gn,Hn):
self.parent = parent
self.state = state #字符串
self.Fn = Fn
self.Gn = Gn
self.Hn = Hn
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
from operator import attrgetter from Node import * #A*算法 class AStar_search: def __init__(self,originode,targetnode,length): #length=3... self.originode = originode #结点对象 self.targetnode = targetnode #结点对象 self.length = length #存N数码边长 目前只适用于八数码 self.opened = [self.originode] #存结点对象 self.closed = [] #存结点对象 #获得逆序数 def reversenum(self,node): Sum=0 for i in range(0,9):#range 左闭右开 if(node.state[i]=='0'): continue else: for j in range(0,i): if(node.state[j]>node.state[i]): Sum+=1 return Sum #Hn计算 def hn(self,node): hn = 0 for i in range(0,9): if(self.targetnode.state[i] != node.state[i]): hn += 1 return hn #扩展结点 def Expand(self,node): expand = {0:[1, 3], 1:[0, 2, 4], 2:[1, 5], 3:[0,4,6], 4:[3,1,5,7], 5:[4,2,8], 6:[3,7], 7:[6,4,8], 8:[7,5]} expandnode=[]#结点对象数组/列表 index0 = node.state.index('0') directions = expand[index0] j = index0 for i in directions: j = index0 if (i>j): #0的位置和此位置可移动的目标位置比较 i,j = j,i new = Node(None,0,0,0,0) #后几项先初始化为0 new.state = node.state[:i] + node.state[j] + node.state[i+1:j] + node.state[i] + node.state[j+1:] #字符串的拼接 expandnode.append(new) return expandnode #是否在某表里 def isInTable(self,node,table): global N #全局修改 for i in table: if i.state == node.state: #用状态判断更稳妥 N = i return True return False #输出 def PRINT(self,node): result = [] while node is not None:#根据parent字典中存储的父结点提取路径中的结点 逆序向上找 current = node.state result.append(current) node = node.parent result.reverse()#逆序 for i in range(len(result)): print("step--" + str(i+ 1)) print(result[i][:3]) print(result[i][3:6]) print(result[i][6:]) print() #求最小Fn def MIN(self,opened): minFn=min(opened,key=attrgetter("Fn")) #在对象数组里 按Fn找到最小的对象 return minFn #A*算法 def A_star(self): if((self.reversenum(self.originode)%2) != (self.reversenum(self.targetnode)%2)): print("该目标状态不可达!") else: self.opened[0].Hn = self.hn(self.opened[0]) #初始节点初始化 一定要改变opened中的值 self.opened[0].Fn = self.opened[0].Hn + self.opened[0].Gn while self.opened: current = self.MIN(self.opened) self.opened.remove(current) if(current.state == self.targetnode.state): break expandnode = self.Expand(current) for node in expandnode: Fn = current.Gn + 1 + self.hn(node) if(self.isInTable(node,self.opened)): #一定要改变opened表中的node 而不是取出来的node if(Fn < node.Fn): N.Fn = Fn N.parent = current if(self.isInTable(node,self.closed)): if(Fn < node.Fn): N.Fn = Fn N.parent = current self.opened.append(node) if(not self.isInTable(node,self.opened) and not self.isInTable(node,self.closed)): node.Gn = current.Gn + 1 node.Hn = self.hn(node) node.Fn = node.Gn + node.Hn node.parent = current self.opened.append(node) self.closed.append(current) self.PRINT(current)

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
代码说明:
其实写完之后还是似懂非懂的样子,看到网上一些代码并没有对已入closed表的节点再处理并重新放回opened表中的部分,也没有搞懂A算法和A*算法的区别。
这一次先到这里,先准备下一场答辩,我还会再回来继续探索的!
四、应用领域
- 经典的路径规划算法
- 自动驾驶领域
- 游戏中的寻路,比如《星际争霸》、《帝国时代》等
声明:本文内容由网友自发贡献,转载请注明出处:【wpsshop】
推荐阅读


相关标签

