
热门标签
热门文章
- 1LangChain实现AgentExecutor调用tools_langchain agentexecutor
- 2Nodejs 第八十章(Kafka高级)
- 3MATLAB仿真UR5机器人simulink simscape 自制建模 正向运动学,逆向运动学关节空间轨迹规划 五次多项式轨迹规划_采用五次多项式进行轨迹规划,采用逆动力学进行两自由度机器人的控制
- 42021回顾 | AI 领域十大研究趋势及必读论文
- 5Python PyQt5对象类型的判定对象删除操作详细介绍
- 6前端开发者的酷炫数据可视化大屏秘籍:亲手打造视觉盛宴
- 7Vue学习笔记2——MvVM模式和第一个Vue程序_html 运用mvvm模式实现vue data 和method
- 8防御跨站请求伪造(CSRF)攻击:前端开发者的安全指南_跨站请求伪造怎么解决
- 9ubantu20.04下配置hadoop环境详细教程(包含可能遇到的问题以及解决方法)_ubuntu解压hadoop后不显示版本信息
- 10NodeManager启动错误_error nodemanager.nodemanager: error starting node
当前位置: article > 正文
智能车摄像头算法——圆环元素_智能车摄像头圆环
作者:Li_阴宅 | 2024-07-14 23:16:12
赞
踩
智能车摄像头圆环
1.入环的函数
(1)搜上下边线
搜上下边线,处理圆环的时,可以利用上下边线的特点。
uint8_t UpdownSideGet(uint8_t imageInput[OV7725_UART_H][OV7725_UART_W], uint8_t imageOut[2][OV7725_UART_W]) { uint8_t i = 0, j = 0; uint8_t last = OV7725_UART_H/2; imageOut[0][OV7725_UART_W-1] = 0; imageOut[1][OV7725_UART_W-1] = OV7725_UART_H-1; //从图像中间行 从中到下 从中到上 扫描 //处理中间单独那一列的上下边线 for(i = last; i >= 0; i--) { if(!imageInput[i][OV7725_UART_W/2]) { imageOut[up][OV7725_UART_W/2] = i; break; } } for(i = last; i < OV7725_UART_H; i++) { if(!imageInput[i][OV7725_UART_W/2]) { imageOut[down][OV7725_UART_W/2] = i; break; } } //其他列的上下边线 //从中到左 for(i = OV7725_UART_W/2-1; i > 0; i--)//遍历每一列 { imageOut[up][i] = 0; imageOut[down][i] = OV7725_UART_H-1; for(j = imageOut[0][i+1] + 5; j > 0; j--)//一列中的扫描每行 从上列的行数+10开始向上扫描 { if(!imageInput[j][i]) { imageOut[up][i] = j; break; } } for(j = imageOut[1][i+1] - 5; j < OV7725_UART_H; j++) { if(!imageInput[j][i]) { imageOut[down][i] = j; break; } } } //从中到右 for(i = OV7725_UART_W/2+1; i < OV7725_UART_W-1; i++) { imageOut[up][i] = 0; imageOut[down][i] = OV7725_UART_H-1; for(j = imageOut[0][i-1] + 5; j > 0; j--) { if(!imageInput[j][i]) { imageOut[up][i] = j; break; } } for(j = imageOut[1][i-1] - 5; j < OV7725_UART_H; j++) { if(!imageInput[j][i]) { imageOut[down][i] = j; break; } } } return 0; }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
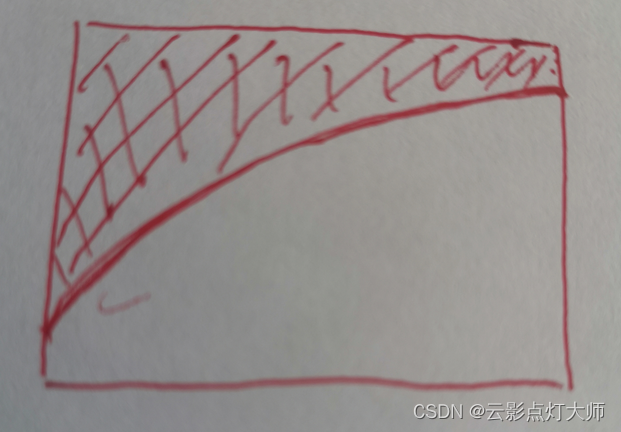
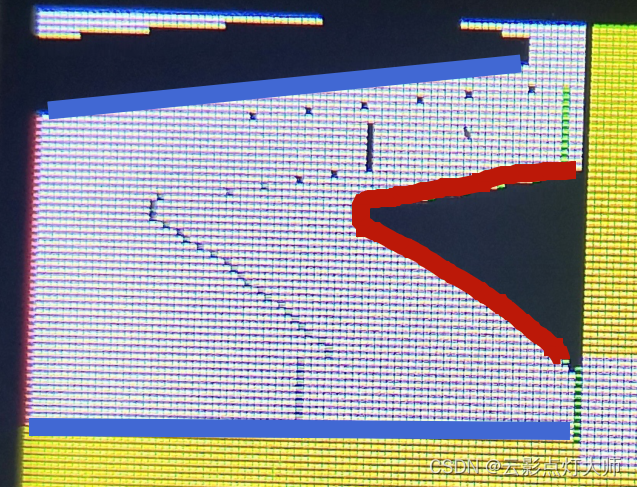
(2)找凸起的弧
找凸起的弧,用于圆环的检测。如下图红色的线。
RoundaboutGetArc函数中传入的num代表着,要检测的这个圆弧大小,要求这个圆弧包含多少个点。
以左圆环为例:
先判断边线丢不丢线,不丢线再进行下一步。由于是遍历一幅图像左边线数组的每一行,我们就找这样一个特征:它下面连续递减点的个数+它上面连续递减点的个数+跟它横坐标一样大的点的个数 >=我们设定的值。这个就是我们认为的圆弧
/*! * @brief 判断左右边线是否存在弧形 * 输出的 index 圆弧的顶点位置 * @param imageInput : 二值图像信息 * @param imageOut : 边线数组 * @param status : 1:左边线 2:右边线 * @param num : 圆弧的大小 用点数表示 (连续N个增 连续N个减) * @return 1 有弧线 0 没弧线 */ uint8_t RoundaboutGetArc(uint8_t imageSide[OV7725_UART_H][2], uint8_t status, uint8_t num,uint8_t* index) { int i = 0; uint8_t inc = 0, dec = 0, n = 0; switch(status) { case 1: for(i = START_H-2; i > END_H; i--) { //没有丢线 if(imageSide[i][0] != 1 && imageSide[i+1][0] != 1) { if(imageSide[i][0] == imageSide[i+1][0]) { n++; continue; } if(imageSide[i][0] > imageSide[i+1][0]) { inc++; inc+=n; n=0; } else { dec++; dec+=n; n=0; } /* 有弧线 */ if(inc > num && dec > num) { *index = i + num; return 1; } } else { inc = 0; dec = 0;n=0; } } break; case 2: for(i = START_H-2; i > END_H; i--) { if(imageSide[i][1] != OV7725_UART_W-1 && imageSide[i+1][1] != OV7725_UART_W-1) { if(imageSide[i][1] == imageSide[i+1][1]) { n++; continue; } if(imageSide[i][1] > imageSide[i+1][1]) { inc++; inc+=n; n = 0; } else { dec++; dec+=n; n=0; } /* 有弧线 */ if(inc > num && dec > num) { *index = i + num; return 1; } } else { inc = 0; dec = 0;n=0; } } break; } return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
(3)两点之间补线
/*! * @brief 补线处理 * * @param imageSide : 边线 * @param status : 1:左边线补线 2:右边线补线 * @param startX : 起始点 列数 * @param startY : 起始点 行数 * @param endX : 结束点 列数 * @param endY : 结束点 行数 * * @return * * @note endY 一定要大于 startY * */ void ImageAddingLine(uint8_t imageSide[OV7725_UART_H][2], uint8_t status, uint8_t startX, uint8_t startY, uint8_t endX, uint8_t endY) { int i = 0; // 直线 x = ky + b float k = 0.0f, b = 0.0f; switch(status) { case 1://左补线 { k = (float)((float)endX - (float)startX) / (float)((float)endY - (float)startY); b = (float)startX - (float)startY * k; for(i = startY; i < endY; i++) { imageSide[i][0] = (uint8_t)(k * i + b); } break; } case 2://右补线 { k = (float)((float)endX - (float)startX) / (float)((float)endY - (float)startY); b = (float)startX - (float)startY * k; for(i = startY; i < endY; i++) { imageSide[i][1] = (uint8_t)(k * i + b); } break; } } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
(4)判断上线是否单调
/*! * @brief 判断上边线是否单调 * @param X1 :起始X点 * @param X2 :终止X点 X1 < X2 * @param imageIn : 边线数组 * * @return 0:不单调or错误, 1:单调递增, 2:单调递减 * * @note * * @see * * @date 2021/11/30 星期二 */ uint8_t RoadUpSide_Mono(uint8_t X1, uint8_t X2, uint8_t imageIn[2][OV7725_UART_W]) { uint8_t i = 0, num = 0; for(i = X1; i < X2-1; i++) { if(imageIn[0][i] >= imageIn[0][i+1]) num++; else num = 0; if (num >= (X2-X1)*4/5) return 1; } for(i = X1; i < X2-1; i++) { if(imageIn[0][i] <= imageIn[0][i+1]) num++; else num = 0; if (num >= (X2-X1)*4/5) return 2; } return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
2.找圆环
找圆环的特征,以左圆环为例,要求“左边线有弧,右边线单调”。左边线有弧已经说过了,这里的“右边线单调”:需要右边线在一定的横坐标范围内单调的点数大于我们设定的值,才认为是这里的“右边线单调”。
uint8_t RoadIsRoundabout(uint8_t Upimage[2][OV7725_UART_W], uint8_t imageInput[OV7725_UART_H][OV7725_UART_W], uint8_t image[OV7725_UART_H][2], uint8_t *flag) { uint8_t i = 0; errL=0, errR=0; leftState = 0, rightState = 0; count = 0; uint8_t num = 0, py; // 从车头往前 左边线是否单调 for(i = START_H-2; i > END_H; i--) { if(image[i][0] == 1) continue; if(image[i][0] >= image[i+1][0]) // i是Y坐标值 0 是图像左线X坐标 { if(image[i][0]<OV7725_UART_W/2 - 5) num++; else num = 0 ; if(num == 50) { num = 0; leftState = 1; // 左单调标志 break; } } else { num = 0; } if(i <= END_H+1) // 清0 num = 0; } errL = RoundaboutGetArc(image, 1, round_size, &py); errR = RoundaboutGetArc(image, 2, round_size, &py); // 右边线是否单调 for(i = START_H-2; i > END_H; i--) { if(image[i][1] == OV7725_UART_W-1) continue; if(image[i][1]<= image[i+1][1]) { if(image[i][1]>OV7725_UART_W/2 + 5) num++; else num = 0 ; if(num == 50) { num = 0; rightState = 1; break; } } else { num = 0; } if(i <= END_H+1) num = 0; } // 左边单调, 检测右侧是否是环岛 if(leftState == 1 && rightState == 0 && errL == 0) { count = 0; if(RoundaboutGetArc(image, 2, round_size, &count)) { *flag = 1; return 1; } else { return 0; } } /* 右边单调, 检测左侧是否是环岛 */ if(rightState == 1 && leftState == 0&& errR == 0) { count = 0; if(RoundaboutGetArc(image, 1, round_size, &count)) { *flag = 2; return 2; } } return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
3.补线入环出环
右环为例,左环也是一样,对称写(右环为奇数状态,左环为偶数状态)。目前已经找到圆环,进入状态1。
状态1:找到圆环后,补一条线,保证车子直走。一直检查圆弧还在不在,直到弧消失了,就进入状态3。
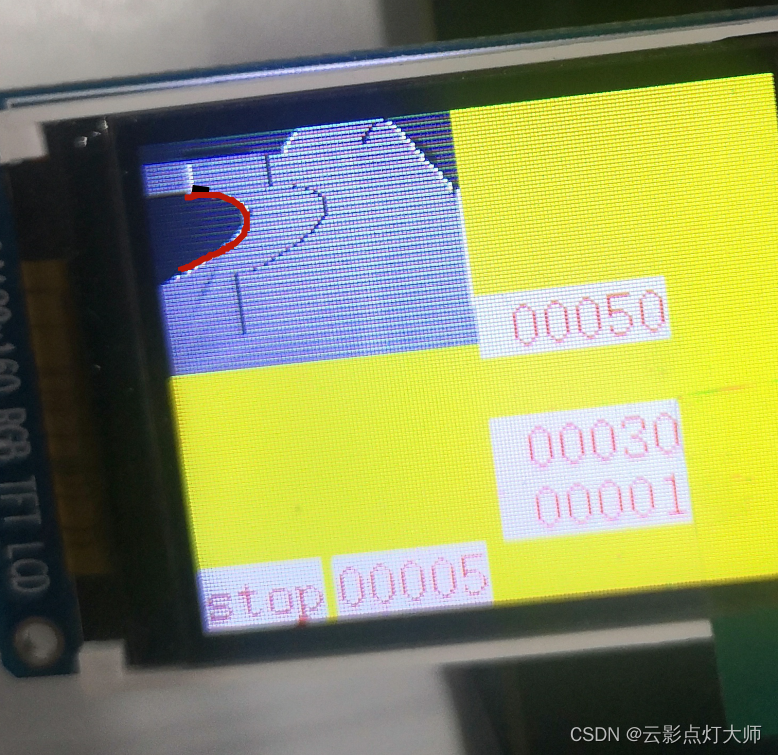
状态3:让车子一直往右拐,一直拐到上线单调的时候。进入状态5
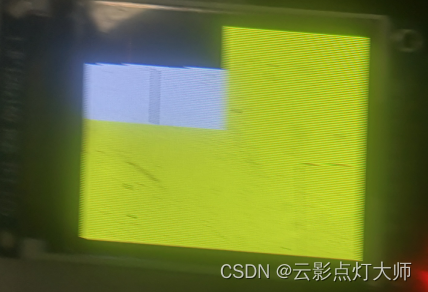
这个还没拐成,要继续拐。
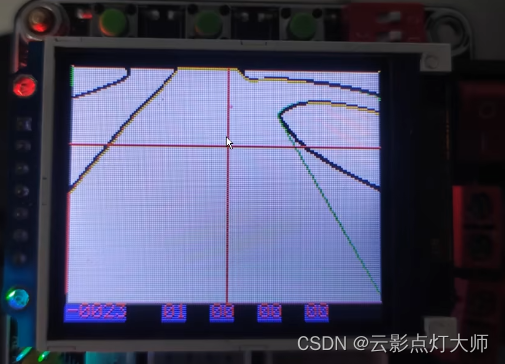
拐到这种时候,就已经进入圆环口了,可以不用拐了。
 在圆环内,都是这种图像,正常走就行了,之后的状态就是出圆环了。
在圆环内,都是这种图像,正常走就行了,之后的状态就是出圆环了。
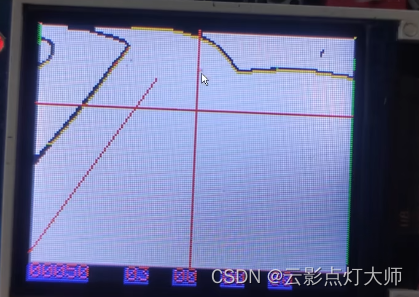
状态5:出圆环,找右边凸起的位置+下线全是最低点这种情况,然后补一条线,让车子向左拐。一直拐到上线单调的时候,进入状态7.
一直拐
 拐到上线单调了,进入状态7。
拐到上线单调了,进入状态7。
状态7:加大力度拐,拐到上线不单调的时候,就出圆环正常行驶了。

参考代码
具体要根据车子的速度和摄像头选择图像的大小来确定里面的参数
void RoundaboutProcess(uint8_t imageInput[OV7725_UART_H][OV7725_UART_W], uint8_t imageSide[OV7725_UART_H][2], uint8_t UpdowmSide[2][OV7725_UART_W], uint8_t* state) { uint8_t i = 0, err5 = 0; uint8_t pointX = 0, pointY = 0, inc = 0, dec = 0; uint8_t flag= 0, Down_flag = 0; static uint8_t finderr = 0; static uint8_t err1 = 0; switch(*state) { //奇数为入右圆环 case 1: // 检查弧线 err1 = RoundaboutGetArc(imageSide, 2, 3, &pointY); // 有弧线 进行补线 连接弧线最右点 和 图像左下角 if(err1) { pointX = imageSide[pointY][1]; ImageAddingLine(imageSide, 2, pointX, pointY, OV7725_UART_W-1, START_H); finderr = 1; } else { if(finderr) *state = 3;//准备进入环岛 } break; /* 发现左环岛 环岛出口处补线 */ case 3: for(i=1;i<OV7725_UART_H-1;i++) { ImageSide[i][0]= ImageSide[i][0]+50; } if(RoadUpSide_Mono(30, OV7725_UART_W-1,UpdowmSide) == 1)//上线单调增进入下一步 *state = 5; break; case 5 : err5 = RoundaboutGetArc(imageSide, 1, 10, &pointY); //检查下线 for(i = OV7725_UART_W-1; i > 0; i--) { if(UpdowmSide[1][i] == 119) inc++; else dec++; if( dec <= 15) { Down_flag = 1; break; } } flag = RoadUpSide_Mono(20, OV7725_UART_W,UpdowmSide); if(flag && err5 && Down_flag) { *state = 7; } break; case 7: ImageAddingLine(imageSide, 1, 80, 10, 0, START_H); flag = RoadUpSide_Mono(50, OV7725_UART_W,UpdowmSide); if(flag==0) { *state = 0; finderr = 0; err1 = 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
有问题可以私聊我咯~
可以加企鹅群 658476482 交流
另外承接各种单片机设计~
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/Li_阴宅/article/detail/826746
推荐阅读

相关标签

