
热门标签
热门文章
- 1MindSpore大模型并行需要在对应的yaml里面做哪些配置_mindformer数据并行
- 2202105110111王宇骐_服务端会自动url解码吗
- 3Hadoop中jps有,但是http://hadoop01:50070/出现不了界面怎么解决?hadoop集群启动但不能访问50070?_jps五项正常启动,hadoop01:50070打不开如何解决
- 4NLPIR+Hadoop_nlpir的hadoop
- 5无人机航拍数据集整理_飞机图片数据集
- 6Java进阶学习之路_java进阶之路
- 7使用Ollama和Open WebUI 部署AI聊天机器人_open-webui 自定义模型名称
- 8pynuput模块 控制和监视鼠标键盘操作
- 9openmv图像识别(形状篇)_openmv识别圆形
- 10一步步带你解锁Stable Diffusion:老外都眼馋的 SD 中文提示词插件分享_sd中文提示词插件
当前位置: article > 正文
嵌入式PID算法理论+实践分析
作者:Li_阴宅 | 2024-07-24 11:12:54
赞
踩
嵌入式pid
1.1 概述
比例(Proportion)积分(Integral)微分(Differential)控制器(PID控制器或三项控制器)是一种采用反馈的控制回路机制,广泛应用于工业控制系统和需要连续调制控制的各种其他应用。
PID控制器连续计算误差值 e(t) 作为所需设定点(SP) 和测量过程变量(PV)之间的差值,并应用基于比例、积分和导数项(分别表示为P、I和D)的校正,因此得名。
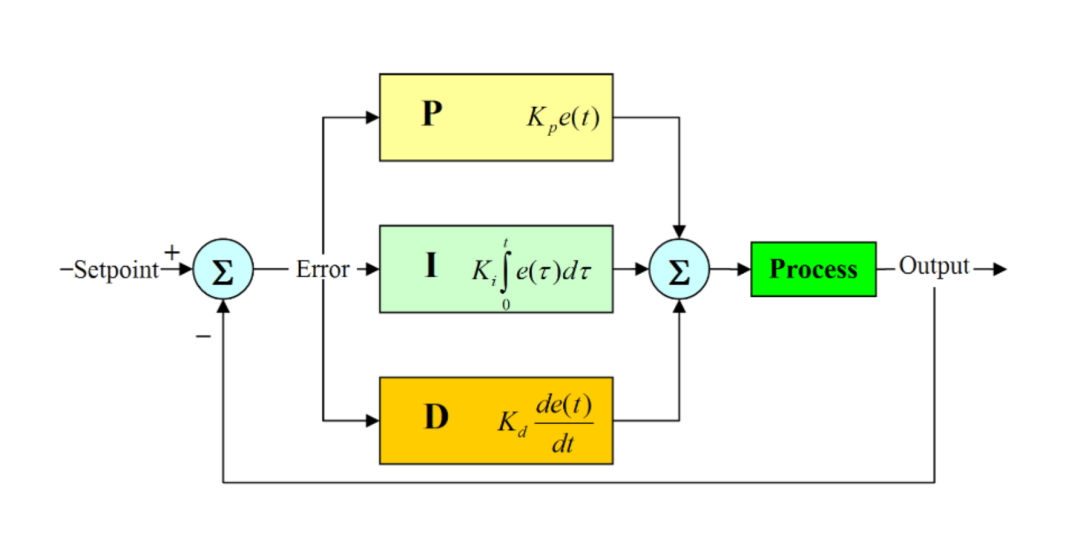
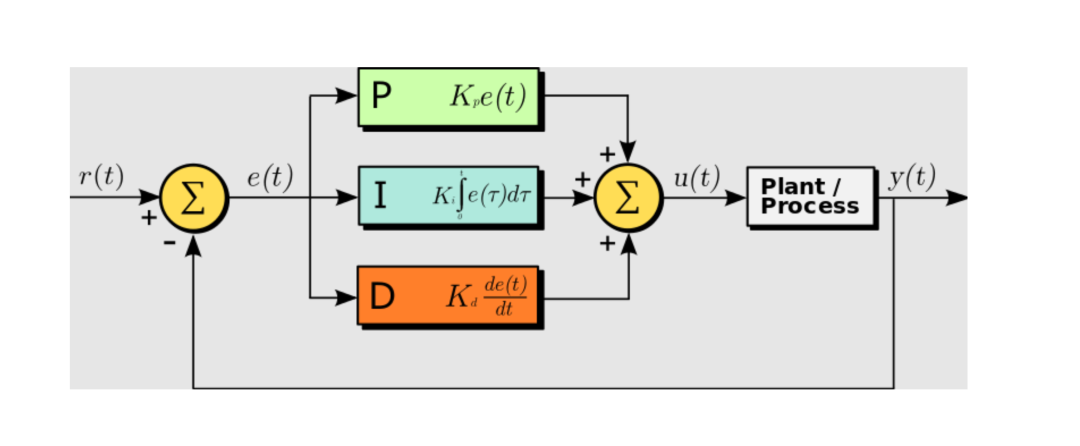
r(t) 是期望的过程值或设定点(SP),y(t) 是测量的过程值(PV)。
1.2 历史发展
1911年,第一个PID控制器是由Elmer Sperry开发的。
1922 年,俄裔美国工程师尼古拉斯·米诺斯基 ( Nicolas Minorsky)才首次利用理论分析制定了我们现在所说的 PID 或三项控制的正式控制律。米诺斯基当时正在为美国海军研究和设计自动船舶转向系统,他的分析基于对舵手的观察。
他指出,舵手不仅根据当前航向误差
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/Li_阴宅/article/detail/874333
推荐阅读
相关标签

