
- 1链表重排--双向链表
- 2【论文指导】计算机毕业设计,摘要如何写?15篇案例把你安排明白_计算机毕业论文大全csdn
- 3【系统实验】Windows搭建IIS web服务_windows搭建网页
- 4Linux基础篇-搭建一台Linux服务器_哪里搞台linux服务器来学习啊
- 5java自动生成代码_guava jpeot 生成代码
- 6Python爬虫:搭建本地IP池
- 7详解Linux查看系统时间_linux查询主机时间
- 8WARN Session 0x0 for server null, unexpected error, closing socket connection and attempting reconne...
- 9mysql数据库安装目录没有my.ini的问题_mysql80没有my.ini
- 10云计算:掌控未来,一触即发!
多目标进化算法——NSGA-II(python实现)_nsga python
赞
踩
前言
由于NSGA-II是基于遗传算法的,所以在讲解NSGA-II之前,我们先对遗传算法有一些基本的了解——遗传算法经常用于单目标优化问题,所进行操作的基本流程如下
- 通过解的二进制值进行交叉变异产生不同的解
- 依据适应度函数,得到每个解的适应值
- 根据适应值的大小来对当前解集合,进行排序筛选。
- 再对筛选出的个体进行新一轮的交叉变异,循环往复使得解集合越来越逼近真实的优化目标。
NSGA-II所做的其实就是把排序的依据改变——就是“如何评判一个解的优劣”,在传统遗传算法中,使用的是适应度函数值,这也是因为传统遗传算法多用在单目标的优化问题中,使用能够使用这一个指标来判断。
下面是遗传算法中一些名词的对应关系:
| 数学概念 | 生物概念 |
|---|---|
| 当前的解集合 | 当前的种群 |
| 解集合中的每个解 | 种群中的个体 |
NSGA-II
但对于一个多目标优化问题来说,它的最优解不再是一个值,而是在多维空间中的一个pareto前沿:一个最优解的集合。因此对于迭代过程中未到达pareto前沿的解来说,评判其优劣应当从两个方面来入手——
收敛性——解靠近pareto前沿的程度(或速度)
分布性——当前解集是否尽可能地覆盖到了pareto前沿。
所以NSGA-II的作者Deb提出了评价当前解集合优劣的两个指标:
- 非支配排序
- 拥挤度距离排序
下面为了方便讲解,我们以双目标的最小化优化问题举例说明,因为这样能够在几何意义上,放在二维平面图中帮助我们去理解。
m
i
n
F
(
x
)
=
{
f
1
(
x
)
,
f
2
(
x
)
}
T
s
t
.
x
∈
X
X
⊂
R
2
min \quad F(x)=\{f_1(x),f_2(x)\}^T\\ st. \quad x\in X \\ \quad \quad X \subset\mathbb R^2
minF(x)={f1(x),f2(x)}Tst.x∈XX⊂R2
非支配排序
支配关系
首先,需要了解两个解的支配关系。我们举例来说明,如果两个目标都是最小化目标的话,说明目标函数值越小,越好。则假设
给定个体
x
0
x_0
x0,
目标函数值
F
(
x
0
)
=
(
f
1
(
x
0
)
,
f
2
(
x
0
)
)
=
(
1
,
1
)
F(x_0) =(f_1(x_0),f_2(x_0))=(1,1)
F(x0)=(f1(x0),f2(x0))=(1,1)
再给定另外的个体
x
1
x_1
x1,
目标函数值
F
(
x
1
)
=
(
f
1
(
x
1
)
,
f
2
(
x
1
)
)
=
(
2
,
2
)
F(x_1) =(f_1(x_1),f_2(x_1))=(2,2)
F(x1)=(f1(x1),f2(x1))=(2,2)
我们可以发现, 在两个目标函数方向(objective),
x
0
x_0
x0 所求的目标函数值
(
1
,
1
)
(1,1)
(1,1) 都比
x
1
x_1
x1 的目标函数值
(
2
,
2
)
(2,2)
(2,2) 小,而同时两个优化方向都是最小化。所以
x
0
x_0
x0 所得解的效果要要好于
x
1
x_1
x1 ,即
x
0
x_0
x0 支配
x
1
x_1
x1。
同样的,当一个方向上相等,支配关系又另一个方向目标函数值的大小来决定,例如:
(
1
,
2
)
(1,2)
(1,2) 支配
(
2
,
2
)
(2,2)
(2,2)。
如果在二维平面图上用几何意义来理解的话,就是由原点开始向外做同心圆,内侧圆上的点支配外侧圆上的点。(当然仅限于两个目标,且优化方向都是最小化)
非支配关系
但是我们会遇到另外一种情况,例如
(
1
,
2
)
(1,2)
(1,2) 和
(
2
,
1
)
(2,1)
(2,1) ,显然在一个方向上2 > 1,但在另一个方向上1 < 2,对应在几何意义上,就是这两个点在同一个圆上。像这种彼此没有明确的支配关系,即双方无法支配对方的时候,两者的关系就是非支配关系。
综上对于两个个体而言,他们的大小关系便可以对应为两者的支配关系。所以在类定义中,我覆写了小于号的方法,方便在代码中比较两个个体的支配关系。
# 重载小于号“<”
def __lt__(self, other):
v1 = list(self.objective.values())
v2 = list(other.objective.values())
for i in range(len(v1)):
if v1[i] > v2[i]:
return 0 # 但凡有一个位置是 v1大于v2的 直接返回0,如果相等的话比较下一个目标值
return 1
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
非支配排序算法
算法思想
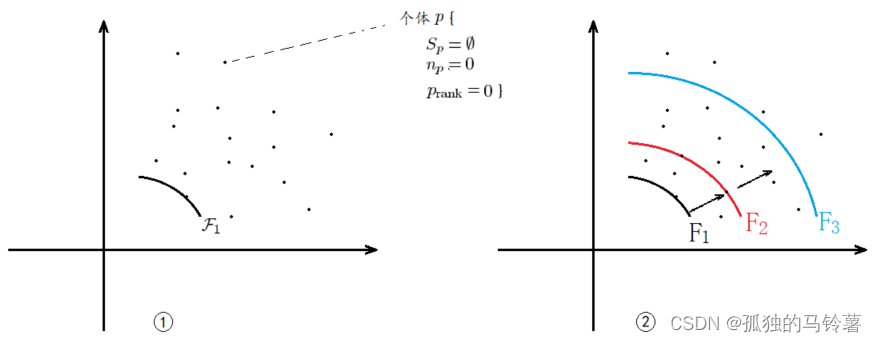
由上,显然支配关系能够作为一个指标来衡量这个解的优劣程度,因此我们利用个体间的支配关系,将现有种群进行分层。最靠近pareto前沿的解它的等级(rank)最高,为第一层。然后依次判断每个个体处在第几层中,给每个个体的rank赋值。几何上来看,类似于画同心圆,看看这个解在第几个同心圆中。然后依据每个个体的rank值来进排序选择。
算法伪代码
下面是原文作者的伪代码:
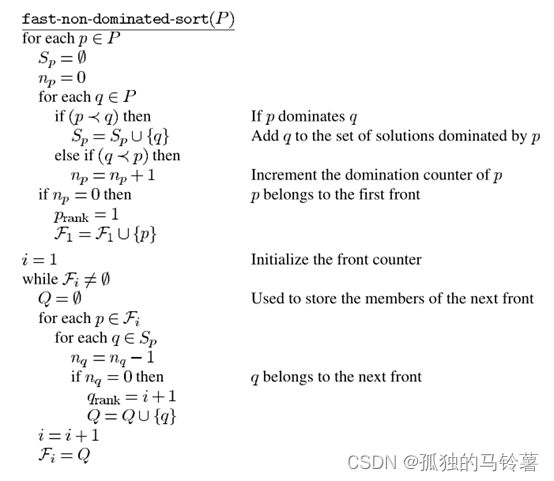
伪代码释义
这里面需要了解其中几个变量的含义——
n
p
n_p
np:解
p
p
p 被几个解所支配,是一个数值(左下部分点的个数)
S
p
S_p
Sp:解
p
p
p 支配哪些解,是一个解集合(右上部分点的内容)
F
i
F_i
Fi:第
i
i
i 层的解集合(显然同一层内的解互相都是非支配解)
p
r
a
n
k
p_{rank}
prank:解
p
p
p 所在层的等级(越小越好)
伪代码主要进行了两步:
- 所有个体的 n p n_p np, S p S_p Sp都算出来了,但只有最前沿的个体 rank确定下来,该层的所有个体的rank值设为1,再将其放入了 F 1 F_1 F1 层中。
- 用 F 1 F_1 F1 中个体 p p p 的 S p S_p Sp(里面放着后面的点),取其中每个个体 q ( ∈ S p ) q(\in S_p) q(∈Sp),该个体每被前一层的p支配过一次,该个体属性 n n n 的值就减 1。则,当该层的 p p p 都支配过 q q q 一次后,若 n p = 0 n_p =0 np=0。说明 q q q 就是紧邻该层的下一层,则把 q q q 放入 F 2 F_2 F2 中 ,个体 q q q 的属性 rank = 2
- 重复 2. 的步骤用于
F
2
F_2
F2 ,得到
F
3
F_3
F3 ,…
Python代码实现
def fast_non_dominated_sort(P): """ 非支配排序 :param P: 种群 P :return F: F=(F_1, F_2, ...) 将种群 P 分为了不同的层, 返回值类型是dict,键为层号,值为 List 类型,存放着该层的个体 """ F = defaultdict(list) for p in P: p.S = [] p.n = 0 for q in P: if p < q: # if p dominate q p.S.append(q) # Add q to the set of solutions dominated by p elif q < p: p.n += 1 # Increment the domination counter of p if p.n == 0: p.rank = 1 F[1].append(p) i = 1 while F[i]: Q = [] for p in F[i]: for q in p.S: q.n = q.n - 1 if q.n == 0: q.rank = i + 1 Q.append(q) i = i + 1 F[i] = Q return F

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
过渡1
上面描述的非支配排序方法从解的收敛性,或者说靠近pareto的前沿的程度来衡量解的优劣。以此,我们假设现在待选择种群个体有120个,我们的种群规模为100,即要选择前100个作为父代进入下一次迭代。
通过非支配排序,若得到
F
1
F_1
F1 有30个,
F
2
F_2
F2 有60个,
F
3
F_3
F3 有10个,
F
4
F_4
F4 有20个。很显然,我们只选择
F
1
F_1
F1 ,
F
2
F_2
F2 ,
F
3
F_3
F3 中的个体就可以了。但上述情况是刚刚好的,我们需要考虑比较一般的情况——
如果划分的线切在了
F
i
F_i
Fi 层中,即如果
F
3
F_3
F3 有30个,要从中选择10个,剔除20个,这种情况该如何选择呢?即对于处在同一层中,rank属性值相同的个体,我们应当依据什么来对他们进行排序呢?
拥挤度距离排序
算法思想
由此,作者为了保证种群的多样性,即保留解的分布的稀疏程度,放在图上来看的话就是尽可能得让解分散。在这一原则之下,位于两端的解是必留的,而处于中间的点,则通过定义拥挤度距离来进行判断。形象一些来理解的话,就是“你身边距离比较近的同类太多了,只留下你一个能够代表这一段就行了”。
算法伪代码
下面是原文作者的伪代码:
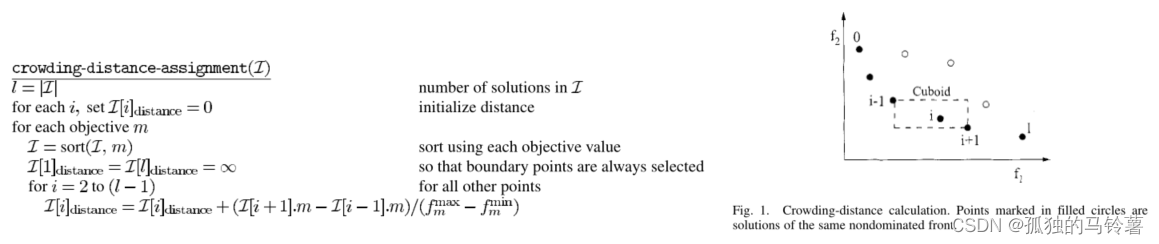 该段代码比较简单,在不同目标方向上,对于两端点(目标值最大和最小的)的拥挤度距离直接设置为正无穷,而对于中间的点遵循一个公式,简单概括为:
该段代码比较简单,在不同目标方向上,对于两端点(目标值最大和最小的)的拥挤度距离直接设置为正无穷,而对于中间的点遵循一个公式,简单概括为:
Python代码实现
def crowding_distance_assignment(L): """ 传进来的参数应该是L = F(i),类型是List""" l = len(L) # number of solution in F for i in range(l): L[i].distance = 0 # initialize distance for m in L[0].objective.keys(): L.sort(key=lambda x: x.objective[m]) # sort using each objective value L[0].distance = float('inf') L[l - 1].distance = float('inf') # so that boundary points are always selected # 排序是由小到大的,所以最大值和最小值分别是 L[l-1] 和 L[0] f_max = L[l - 1].objective[m] f_min = L[0].objective[m] for i in range(1, l - 1): # for all other points L[i].distance = L[i].distance + (L[i + 1].objective[m] - L[i - 1].objective[m]) / (f_max - f_min) # 虽然发生概率较小,但为了防止除0错,当bug发生时请替换为以下代码 # if f_max != f_min: # for i in range(1, l - 1): # for all other points # L[i].distance = L[i].distance + (L[i + 1].objective[m] - L[i - 1].objective[m]) / (f_max - f_min)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
过渡2
由此介绍完“非支配排序”和“拥挤度距离分配”之后,对于一个已有种群的排序选择的基本流程便可以确定下来——
- 给定种群中的两个个体,首先比较其rank,该值越小,说明其越靠近pareto前沿,故选择rank值小的。
- 若两个个体的rank值相同,即两个解是非支配解时,比较其crowding_distance,该值越大,表示其所处的位置更稀疏,更能表现出种群的多样性,故选择crowding_distance值大的。
二元锦标赛
以上流程便是 “二元锦标赛”选择的基本策略。(二元锦标赛:随机选择两个个体,依据某种指标策略进行比较,较优的个体胜出,作为进行交叉的父本中的一个)
其对应代码如下
def binary_tournament(ind1, ind2):
"""
二元锦标赛
:param ind1:个体1号
:param ind2: 个体2号
:return:返回较优的个体
"""
if ind1.rank != ind2.rank: # 如果两个个体有支配关系,即在两个不同的rank中,选择rank小的
return ind1 if ind1.rank < ind2.rank else ind2
elif ind1.distance != ind2.distance: # 如果两个个体rank相同,比较拥挤度距离,选择拥挤读距离大的
return ind1 if ind1.distance > ind2.distance else ind2
else: # 如果rank和拥挤度都相同,返回任意一个都可以
return ind1
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
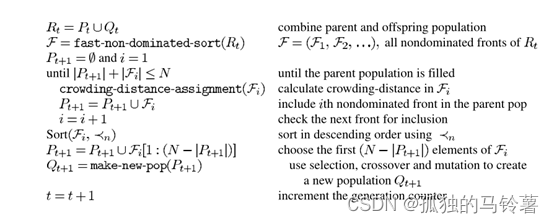
精英选择策略
首先,在传统的遗传算法中,在某一次迭代中,只有该次迭代的父代参与选择交叉变异,从而产生子代,作为下一次迭代的父代。
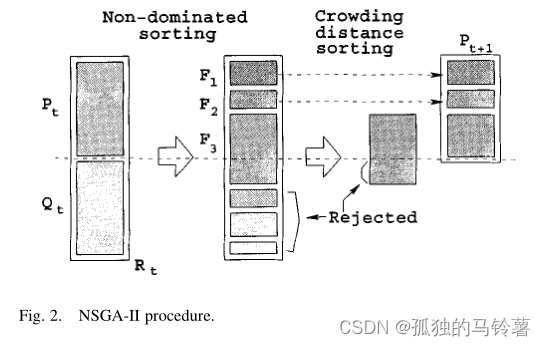
而在NSGA-II中,为了保证最优解的不丢失,提高算法的收敛速度,作者提出了“精英选择策略”,即将父代
P
t
P_t
Pt 和子代
Q
t
Q_t
Qt 种群,合并为一个种群
R
t
R_t
Rt ,对其整体进行非支配排序和拥挤度距离计算,根据上述方法进行排序和选择作为下一届的父代
P
t
+
1
P_{t+1}
Pt+1 。父代再通过一般的方法进行选择交叉排序产生子代
Q
t
+
1
Q_{t+1}
Qt+1 。
这里同样也是循环的主流程所在!
选择交叉变异生成新种群
选择
随机从种群中选择两个个体,让其进行过渡2所说的“二元锦标赛”,获胜的作为父本1;同样操作,再得到一个父本2。之后,为了避免遗传算法中的早熟现象,多增加一步判断,使得父本1和父本2不相同。
交叉
对得到的两个父本进行交叉,产生两个子代。这里选择的交叉算子是“模拟二进制交叉(SBX)”

变异
对于得到的两个子代,其中一个进行变异操作,另一个不变(千万不要两个都变,会引起一种早熟现象——所有的个体都过早的陷于某几个极值而停止变化,具体原因未明,待解决),这里选择的变异算子是“多项式变异”(PM)
x
j
=
x
j
+
Δ
j
Δ
j
=
{
(
2
μ
i
)
1
η
+
1
μ
i
<
0.5
1
−
[
2
(
1
−
μ
i
)
]
1
η
+
1
μ
i
≥
0.5
x_j=x_j+ \Delta_j \\ ~\\ ~\\ \Delta_j =
μ
i
\mu_i
μi 是满足(0,1)均匀分布的随机数,
η
\eta
η 是变异分布参数。
Python代码实现
def make_new_pop(P, eta, bound_min, bound_max, objective_fun): """ use select,crossover and mutation to create a new population Q :param P: 父代种群 :param eta: 变异分布参数,该值越大则产生的后代个体逼近父代的概率越大。Deb建议设为 1 :param bound_min: 定义域下限 :param bound_max: 定义域上限 :param objective_fun: 目标函数 :return Q : 子代种群 """ popnum = len(P) Q = [] # binary tournament selection for i in range(int(popnum / 2)): # 从种群中随机选择两个个体,进行二元锦标赛,选择出一个 parent1 i = random.randint(0, popnum - 1) j = random.randint(0, popnum - 1) parent1 = binary_tournament(P[i], P[j]) # 从种群中随机选择两个个体,进行二元锦标赛,选择出一个 parent2 i = random.randint(0, popnum - 1) j = random.randint(0, popnum - 1) parent2 = binary_tournament(P[i], P[j]) while (parent1.solution == parent2.solution).all(): # 如果选择到的两个父代完全一样,则重选另一个 i = random.randint(0, popnum - 1) j = random.randint(0, popnum - 1) parent2 = binary_tournament(P[i], P[j]) # parent1 和 parent1 进行交叉,变异 产生 2 个子代 Two_offspring = crossover_mutation(parent1, parent2, eta, bound_min, bound_max, objective_fun) # 产生的子代进入子代种群 Q.append(Two_offspring[0]) Q.append(Two_offspring[1]) return Q def crossover_mutation(parent1, parent2, eta, bound_min, bound_max, objective_fun): """ 交叉方式使用二进制交叉算子(SBX),变异方式采用多项式变异(PM) :param parent1: 父代1 :param parent2: 父代2 :param eta: 变异分布参数,该值越大则产生的后代个体逼近父代的概率越大。Deb建议设为 1 :param bound_min: 定义域下限 :param bound_max: 定义域上限 :param objective_fun: 目标函数 :return: 2 个子代 """ poplength = len(parent1.solution) offspring1 = Individual() offspring2 = Individual() offspring1.solution = np.empty(poplength) offspring2.solution = np.empty(poplength) # 二进制交叉 for i in range(poplength): rand = random.random() beta = (rand * 2) ** (1 / (eta + 1)) if rand < 0.5 else (1 / (2 * (1 - rand))) ** (1.0 / (eta + 1)) offspring1.solution[i] = 0.5 * ((1 + beta) * parent1.solution[i] + (1 - beta) * parent2.solution[i]) offspring2.solution[i] = 0.5 * ((1 - beta) * parent1.solution[i] + (1 + beta) * parent2.solution[i]) # 多项式变异 # TODO 变异的时候只变异一个,不要两个都变,不然要么出现早熟现象,要么收敛速度巨慢 why? for i in range(poplength): mu = random.random() delta = (2 * mu) ** (1 / (eta + 1)) if mu < 0.5 else (1 - (2 * (1 - mu)) ** (1 / (eta + 1))) offspring1.solution[i] = offspring1.solution[i] + delta # 定义域越界处理 offspring1.bound_process(bound_min, bound_max) offspring2.bound_process(bound_min, bound_max) # 计算目标函数值 offspring1.calculate_objective(objective_fun) offspring2.calculate_objective(objective_fun) return [offspring1, offspring2]
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
整体流程图
以上,便是所有需要的零件了,下面就是写主函数了,写程序嘛,还是得看具体的流程图:

由此,主函数部分的Python代码实现如下:
def main(): # 初始化/参数设置 generations = 250 # 迭代次数 popnum = 100 # 种群大小 eta = 1 # 变异分布参数,该值越大则产生的后代个体逼近父代的概率越大。Deb建议设为 1 poplength = 30 # 单个个体解向量的维数 bound_min = 0 # 定义域 bound_max = 1 objective_fun = ZDT2 # poplength = 3 # 单个个体解向量的维数 # bound_min = -5 # 定义域 # bound_max = 5 # objective_fun = KUR # 生成第一代种群 P = [] for i in range(popnum): P.append(Individual()) P[i].solution = np.random.rand(poplength) * (bound_max - bound_min) + bound_min # 随机生成个体可行解 P[i].bound_process(bound_min, bound_max) # 定义域越界处理 P[i].calculate_objective(objective_fun) # 计算目标函数值 # 否 -> 非支配排序 fast_non_dominated_sort(P) Q = make_new_pop(P, eta, bound_min, bound_max, objective_fun) P_t = P # 当前这一届的父代种群 Q_t = Q # 当前这一届的子代种群 for gen_cur in range(generations): R_t = P_t + Q_t # combine parent and offspring population F = fast_non_dominated_sort(R_t) P_n = [] # 即为P_t+1,表示下一届的父代 i = 1 while len(P_n) + len(F[i]) < popnum: # until the parent population is filled crowding_distance_assignment(F[i]) # calculate crowding-distance in F_i P_n = P_n + F[i] # include ith non dominated front in the parent pop i = i + 1 # check the next front for inclusion F[i].sort(key=lambda x: x.distance) # sort in descending order using <n,因为本身就在同一层,所以相当于直接比拥挤距离 P_n = P_n + F[i][:popnum - len(P_n)] Q_n = make_new_pop(P_n, eta, bound_min, bound_max, objective_fun) # use selection,crossover and mutation to create a new population Q_n # 求得下一届的父代和子代成为当前届的父代和子代,,进入下一次迭代 《=》 t = t + 1 P_t = P_n Q_t = Q_n # 绘图 plt.clf() plt.title('current generation:' + str(gen_cur + 1)) plot_P(P_t) plt.pause(0.1) plt.show() return 0
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
测试函数与结果
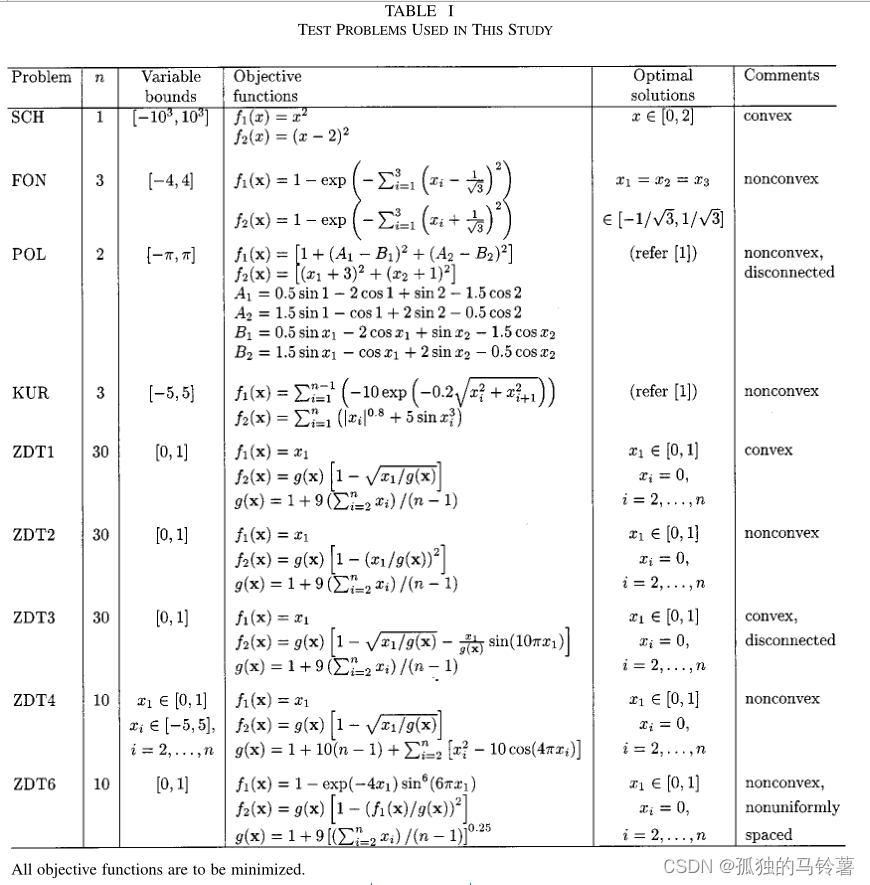
在此,测试函数使用ZDT1(论文还给出了很多其他的测试函数,具体可以看原论文的TABLE1):
得到的结果如下:

其他
源代码地址:
https://github.com/Jiangtao-Hao/NSGA-II.git
参考:
https://blog.csdn.net/Ryze666/article/details/123826212
https://www.docin.com/p-567112189.html

