
- 1Github 2024-03-15 开源项目日报 Top10
- 2MySQL字符集及其排序规则_修改mysql 8.0的 默认字符集和排序规则
- 3python open
- 4java.lang.NoClassDefFoundError: org/apache/commons/io/output/UnsynchronizedByteArrayOutputStream
- 5h5中使用微信分享_h5微信分享
- 6Android kotlin 第三方项目开源弹窗库 - XPopup_android xpopup
- 7Mysql数据库的多实例部署
- 8IDS入侵检测系统
- 9【概率论与数理统计】统计学假设检验的原假设H0、备择假设H1怎么确定?_原假设和备择假设怎么设
- 10HarmonyOS NEXT应用开发案例——自定义TabBar_tabbar中间弧形
基于单片机的四旋翼飞行器的设计与实现
赞
踩
摘 要:四旋翼飞行器可以垂直升降,应用于军事和民用领域,在飞行器的设计中,结合单片机进行设计,可以提升整体性能。基于此,本文探究基于单片机的四旋翼飞行器设计与实现,探索飞行器的硬件设计和软件设计方案,并且对系统的角速度算法以及姿态控制算法进行测试,最后对系统的基础功能以及高级融合功能展开测试。经过测试发现,基于单片机的四旋翼飞行器设计具有可行性以及可靠性。希望通过本文的分析,可以为四旋翼飞行器的改进设计提供可行性借鉴。
关键词:单片机;四旋翼飞行器;设计
0 前言
在信息化技术的高速发展环境下,四旋翼飞行器已经逐渐应用于军用和民用领域,包括农业、国防军工以及现代救援等多个领域。并且四旋翼飞行器具有结构简单成本低的特征,在生活中的应用具有重要的价值。另外,在四旋翼飞行器的设计中,结合单片机展开进一步设计,有利于提升系统的性能。基于此,本文主要探究基于单片机的四旋翼飞行器的设计与实现。
1 原理功能及总体设计
1.1 系统原理和功能
四旋翼飞行器的结构相对较为简单,并且符合力学的特征。在设计中,通过不同螺旋桨叶的反向旋转,实现垂直升降和悬停。电机输出功率超过重力时,则呈现上升趋势;输出升力存在偏差时,则呈现飞行姿态。在基于单片机设计的基础上,飞行器具有数据采集、遥控以及自动平衡飞行等功能。
1.2 系统总体设计
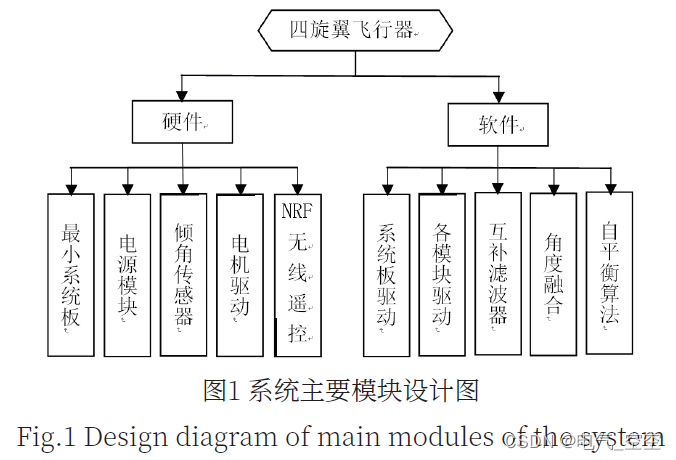
系统总体设计中,包括硬件系统以及软件系统两个部分。硬件系统包括最小系统单元、电源模块、传感器模块、电机模块和遥控模块;软件系统包括驱动程序无线遥控程序以及电机程序等。系统主要模块设计如图1所示。
系统流程设计方面,通过姿态角度、滤波器以及融合计算倾角,确定是否存在偏差,如果不存在偏差,则返回重新计算,反之则进入PID 控制和矢量电机控制阶段。
2 基于单片机的四旋翼飞行器的硬件具体设计
2.1 单片机的选择
单片机的设计中,选择型号为STM32F103 的单片机,是ST 公司生产的单片机芯片,ARM 为32 位的处理芯片,系统带有FLASH 为512K,具有11 个定时器和13个通信接口。在本次设计中,定时器功能主要包括SPI、GPIO 和IIC 三个模块&


