
热门标签
热门文章
- 1十六进制转十进制JAVA(蓝桥杯练习)_java十六进制转十进制 蓝桥杯
- 2java学习之道 --- 如何学习java?
- 3python-----跳转语句_python怎么跳转到某一句代码
- 4【惊喜福利】Docker容器化部署nextcloud网盘,享受高速稳定的文件共享体验!_nextcloud docker优化速度
- 5pycharm安装pyLDAvis出现错误_pyldavis安装失败
- 6MySQL的redo log 、binlog和undolog_mysql binlog redolog undolog
- 7深入理解Java虚拟机(三)_深入java虚拟机 第3版
- 8Centos7安装Mysql5.7(超详细版)
- 9重装虚拟机后MobaXterm无法连接虚拟机,本机网络适配器中不显示虚拟网卡的解决办法_mobaxterm链接虚拟机
- 10cocos creator android 穿山甲 激励视频 java 调用 js_穿山甲 js
当前位置: article > 正文
基于深度强化学习的路径规划笔记_深度学习路径规划
作者:Monodyee | 2024-03-23 03:54:23
赞
踩
深度学习路径规划
MazePathFinder using deep Q Networks
声明:首先感谢知乎周思雨博主;此方法同源借鉴于ICIA一篇强化学习paper,本博主于2019年元月还原了此方法,由于近期在撰写毕业论文,结合本人的理解创作了此篇博客!感兴趣者欢迎随时留言与我讨论
邮箱adamlouisky@gmail.com(1584622065@qq.com)
感谢!
该程序将由几个封锁(由块颜色表示)组成的图像作为输入,起始点由蓝色表示,目的地由绿色表示。 它输出一个由输入到输出的可能路径之一组成的图像。 下面显示的是程序的输入和输出。
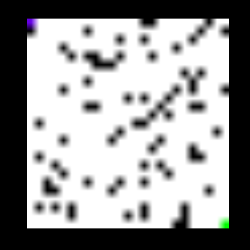
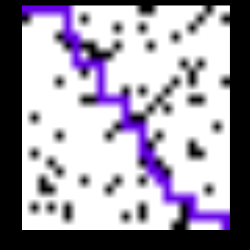
输入图像被馈送到由2个conv和2个fc层组成的模型,其输出对应于底部和右侧动作的Q值。 代理根据哪个Q值更大而向右或向下移动,并且使用代理的新位置生成的相应新图像再次被馈送到模型。获得输出状态并反馈新图像的过程保持重复 直到代理到达到达目的地的终端阶段。
总体思路:
获取image(map)
Agent处理image
Mobile Robot得到向前还是向右的指令
实现
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/Monodyee/article/detail/293010
推荐阅读
相关标签

