
- 1NLP与AI会议期刊详细整理「CCF, SCI」_ai比较好中的trans期刊
- 2自然语言处理(2)——文档相似度计算_vsm矩阵
- 3我与ChatGPT的对话_chatgpt3.5对话
- 4Linux命令 - less命令_linux中less用法
- 5ResNeXt网络详解并使用pytorch搭建模型_resnetxt
- 6ESP Flash downloadtool 工具下载 bin 文件时的报错原因总结_esp8266 chip efuse check error esp_check_mac_and_e
- 7python3安装-mac python3 轻松安装教程
- 8算法导论 第18章 B 树_添b的叙述
- 9程序员:在这技术更新如此快的时代,注意别因学太多而被压垮了_程序员 学习量太大
- 10【论文阅读】Transformer 论文逐段精读
基于SLAM的规划算法仿真复现|SLAM|智能规划_slam与机器学习结合
赞
踩
前言
那么这里博主先安利一些干货满满的专栏了!
首先是博主的高质量博客的汇总,这个专栏里面的博客,都是博主最最用心写的一部分,干货满满,希望对大家有帮助。
高质量博客汇总![]() https://blog.csdn.net/yu_cblog/category_12379430.html?spm=1001.2014.3001.5482
https://blog.csdn.net/yu_cblog/category_12379430.html?spm=1001.2014.3001.5482
项目代码
摘要
本实验报告旨在介绍一个基于认知科学原理的实验项目,该项目结合了视语言、语音识别、机器人平台以及开源仿 真环境,复现了一个单/多智能体的认知导航、认知规划和认知控制的仿真算例。本报告涵盖了对 ekfslam、FastSLAM1 和 FastSLAM2 等三种 SLAM 算法的复现实验,以及利用 Python 绘制图表和对实验结果进行分析的过程。在本实验中,智能 体的智能表现体现在多个方面。首先,通过应用 SLAM 算法,智能体能够自主定位和构建环境地图,展示了其对环境的感 知能力。其次,结合视语言和语音识别技术,智能体可以感知和理解视觉和语义信息,实现了跨模态的感知与交互能力。 最后,通过机器人平台的应用,智能体可以控制自身的行动,包括导航、路径规划和避障等。同时,本实验还突出了认知 科学的重要性。通过 SLAM 算法的应用,我们实现了智能体的自主定位和地图构建,为智能体的认知环境提供了基础。在 认知规划方面,我利用 SLAM 算法提供的地图信息,结合智能体的感知能力,进行路径规划和决策,实现了认知导航。此 外,我们还利用 SLAM 算法的结果进行认知控制,实现了智能体对环境的自主感知和行动。
关键词:
视语言、语音识别、机器人平台、开源仿真环境、认知导航、认知规划、认知控制、SLAM 算法、ekfslam、 FastSLAM1、FastSLAM2、智能体、认知科学
概述
本实验报告旨在介绍一个基于认知科学原理的项目,通 过结合视语言、语音识别、机器人平台和开源仿真环境,构 建了一个单/多智能体的认知导航、认知规划和认知控制的 仿真算例。在该项目中,我们复现了 ekfslam、FastSLAM1 和 FastSLAM2 等三种 SLAM 算法,并通过实验结果的分析 和可视化展示,对这些算法的性能和表现进行评估。 在现代科技的快速发展中,智能导航和机器人系统的研 究已成为热点领域。在这个背景下,认知科学提供了一种理 论和方法框架,以增强智能体在环境中的感知、决策和行动 能力。视语言和语音识别技术为智能体提供了对环境的视觉 和语义信息的感知能力,机器人平台则为智能体的控制和执行提供了实现手段。
SLAM 算法作为一种基础技术,在智能导航和机器人系 统中起着重要的作用。它允许智能体在未知环境中进行自主 定位和地图构建,为导航、规划和控制提供了必要的环境信 息。本实验报告将着重研究和评估 ekfslam、FastSLAM1 和 FastSLAM2三种SLAM算法在认知导航、规划和控制方面 的性能,从而探索其在认知科学中的应用潜力。如图1所示。
通过实验结果的分析和对比,我们将深入探讨每个算法 的优势和局限性,从而为智能导航和机器人系统的发展提供 有价值的见解。此外,我们还将重点讨论本实验中的视语言、 语音识别和机器人平台的应用,以及其对认知导航、规划和控制的贡献。
SLAM的优势
定位问题:“我需要有地图,才能定位”
建图问题:“我需要有定位,才能建图”
SLAM:“定位和图我都不需要,我可以边建图边定位”
实验原理
本实验主要包含以下三种 SLAM 算法:
- EKF-SLAM
- FastSLAM 1.0
- FastSLAM 2.0
EKF-SLAM
EKF-SLAM(Extended Kalman Filter SLAM)是一种基 于扩展卡尔曼滤波器的SLAM算法。它通过使用非线性动 力学模型和非线性观测模型来估计机器人的位置和地图。EKF-SLAM 的核心思想是将机器人的状态表示为一个高斯 分布,通过递归地更新和估计机器人的位置和地图。EKF-SLAM 的算法步骤如图2所示。

卡尔曼滤波器
卡尔曼滤波器是一种用于估计系统状态的滤波器,其原理简单描述如下:
预测(Prediction)
- 状态预测:
![]()
- 先验协方差预测:
![]()
更新(Update)
- 卡尔曼增益:
![]()
- 状态更新:
![]()
- 协方差更新:
![]()
其中,xˆk 是状态估计值,Pk 是状态协方差矩阵,Fk 是 状态转移矩阵,Bk 是控制输入矩阵,uk 是控制输入,Qk 是过程噪声协方差矩阵,zk 是测量值,Hk 是测量模型矩阵, Rk 是测量噪声协方差矩阵,I 是单位矩阵。 卡尔曼滤波器通过预测和更新步骤,利用系统模型和测 量数据递归地估计系统的状态。
FastSLAM 1.0
FastSLAM 1.0 是一种基于粒子滤波器的 SLAM 算法。 它通过使用粒子滤波器来估计机器人的位置和地图。Fast- SLAM 1.0 使用了称为” 分解” 的方法,将机器人的状态估计 分解为对每个粒子进行独立估计的任务,从而提高了算法的 效率和精度。
算法流程如图 3 所示。

FastSLAM 2.0
FastSLAM 2.0 是 FastSLAM 系列算法的改进版本,也是一种基于粒子滤波器的 SLAM 算法。与 FastSLAM 1.0 相比,FastSLAM 2.0 引入了称为” 无向图” 的数据结构来表示地图, 从而进一步提高了算法的效率和精度。

粒子滤波器
粒子滤波器是一种基于蒙特卡洛方法的滤波器,用于对系统状态进行估计。它通过使用一组粒子来表示可能的系统状态,并根据观测数据对这些粒子进行加权更新,以得到对系统状态的估计。
三种 SLAM 算法的对比
EKF-SLAM、FastSLAM 1.0 和 FastSLAM 2.0 是三种不同的SLAM算法。EKF-SLAM使用卡尔曼滤波器来处理机器 人状态和地图的估计,而 FastSLAM 1.0 和 FastSLAM 2.0 使 用粒子滤波器来对机器人路径和地图进行估计。FastSLAM 2.0 在 FastSLAM 1.0 的基础上引入了 Rao-Blackwellized 粒子 滤波器,提高了定位和地图构建的精度。
传感器模型:传递函数如公式所示。
实验过程和结果分析
对于三种算法:
- EKF-SLAM
- FastSLAM 1.0
- FastSLAM 2.0
我都对结果进行了仿真的复现。
EKF-SLAM
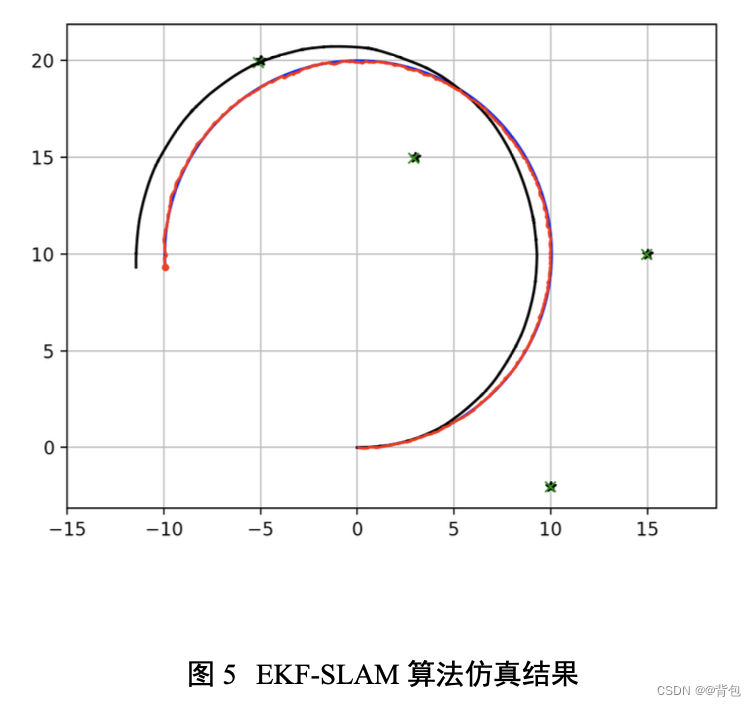
这是一个基于扩展卡尔曼滤波(EKF) 的 SLAM 示例。 蓝线代表真实轨迹,黑线代表航位推算轨迹,红线代表使用 EKF SLAM 估计的轨迹。绿色的十字表示估计的地标点。仿 真结果如图 5 所示。
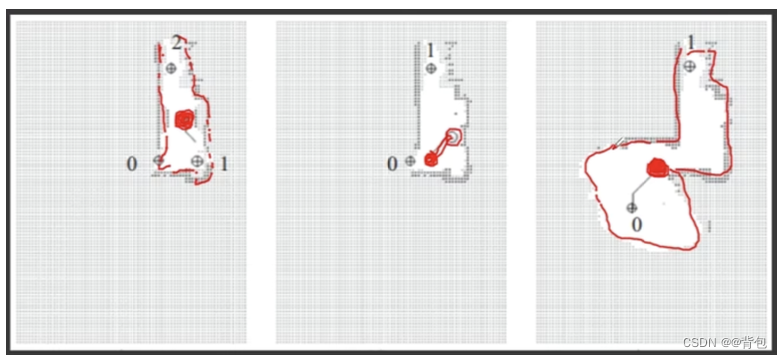
FastSLAM 1.0
FastSLAM 算法的实现基于粒子滤波器,属于概率 SLAM方法的一种。它可用于基于特征的地图或占据栅格地图,如 图6所示。如图 6 所示,粒子滤波器通过一组粒子表示机器人的估 计。每个单独的粒子具有独立的置信度,它包含姿态 (x, y, θ) 和一组地标位置 [(x1 , y1 ), (x2 , y2 ), ...(xn , yn )](n 个地标)。
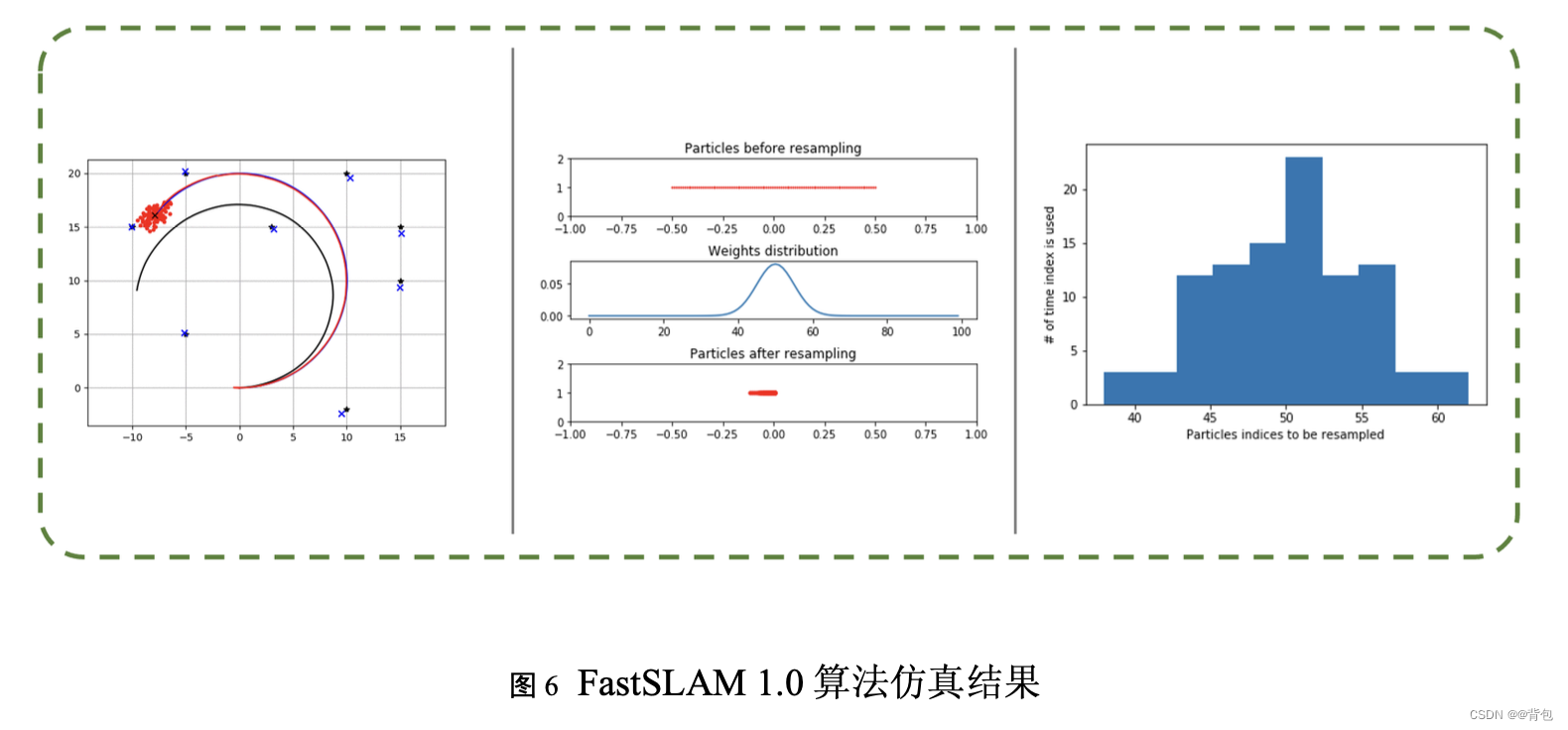
蓝线是真实轨迹;红线是估计轨迹;红点表示粒子的分布;黑线表示航位推算轨迹;蓝叉表示观测和估计的地标;黑叉表示真实地标;换句话说,每个粒子维护一个确定性的 姿态和n个地标的扩展卡尔曼滤波器,并在每次测量时更新它们。
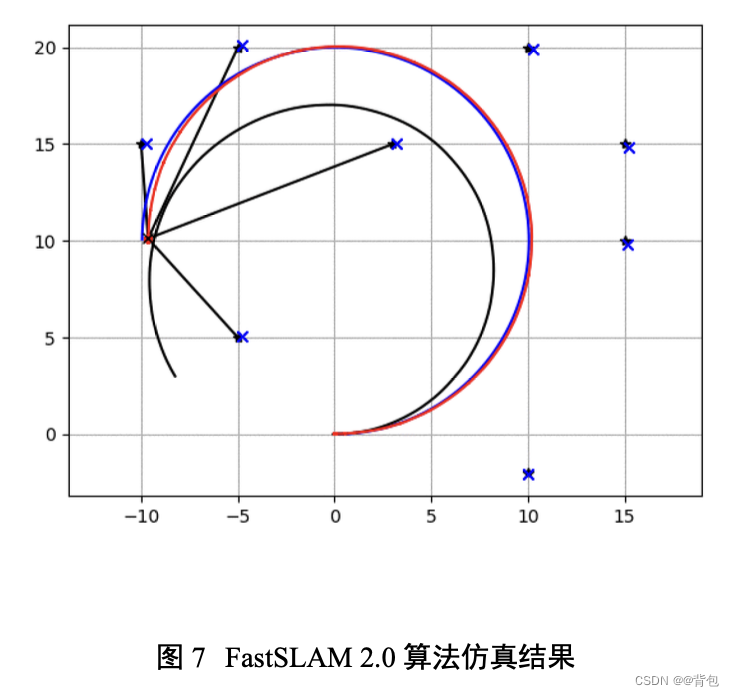
FastSLAM 2.0
仿真结果如图 7 所示。
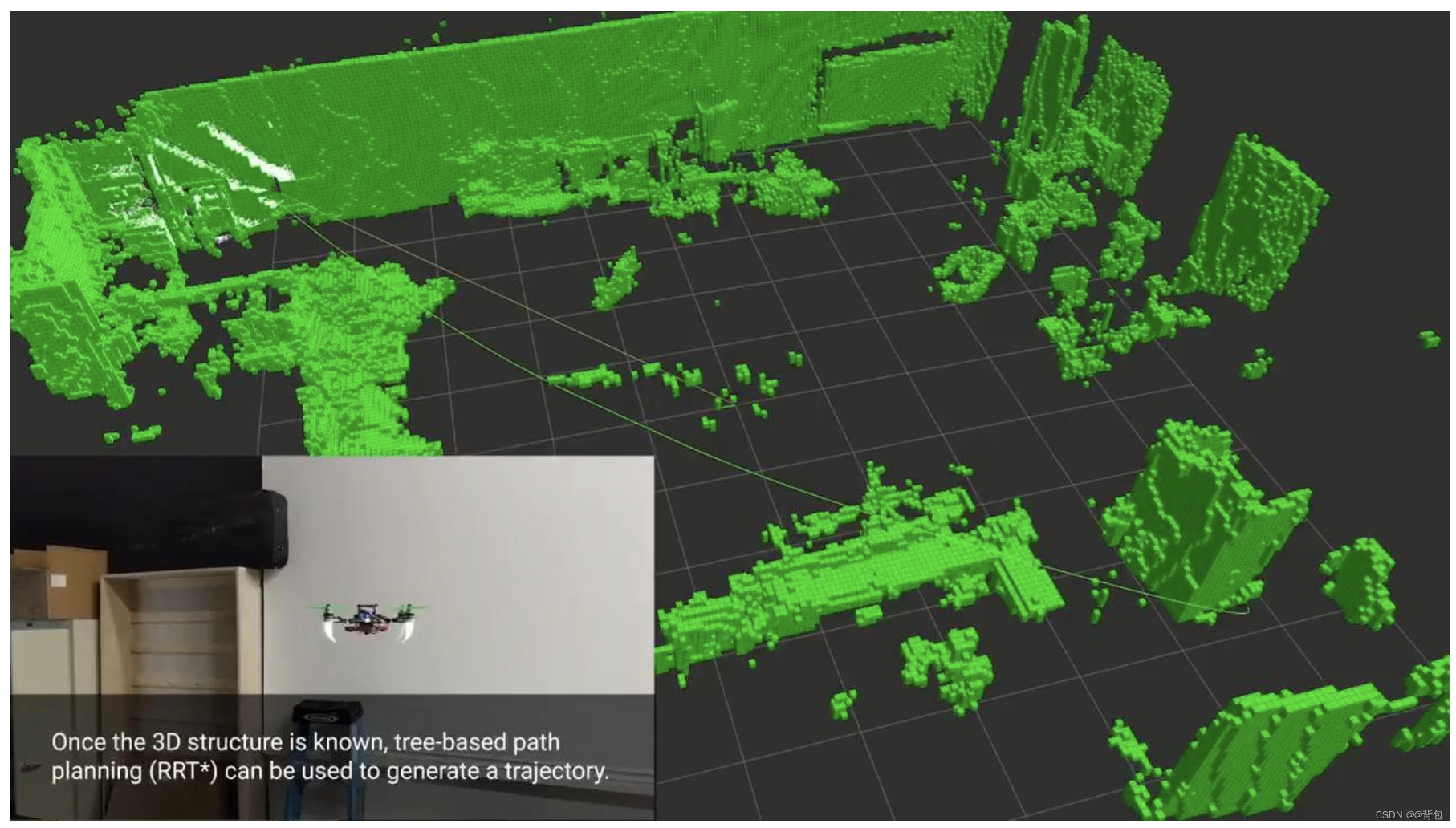
基于 SLAM 的仿真规划实例
实验结果
我在代码中构建OccupancyGridMapping,一个用于处 理里程计和激光数据,并使用占据栅格图绘制结果的 Python 应用程序。该应用程序从config.yaml文件中读取输入数据集,处 理数据,并绘制一个占据栅格地图。如下图8所示。gif动画文件可见附件。
主要原理是基于占据栅格地图建图算法中的逆传感器模型(inversesensormodel),根据机器人的姿态和激光扫描结 果来更新地图的占据概率。逆传感器模型通过计算每个单元 格被占据的对数概率来表示单元格的占据状态,然后将计算得到的对数概率加到对应单元格的当前对数概率上,实现对 单元格占据概率的贝叶斯更新。通过对激光扫描结果进行处 理和转换,确定被占据的单元格和自由单元格,并更新地图 的对数概率。
这种占据栅格地图的建图方法常用于移动机器人的环境 感知和自主导航中,通过激光传感器获取环境信息,将其映 射到栅格地图上,用于机器人的路径规划和避障等任务。
主要包括了以下几个部分:
数据处理: 该算法能够处理来自机器人激光传感器的数 据,并将其转换为占据栅格地图的形式。通过对传感器数据 进行解析、处理和映射,提取环境信息并生成地图。
自主决策: 算法通过逆传感器模型将机器人的姿态和激 光扫描结果转化为地图上的占据概率,实现对地图的贝叶斯更新。机器人可以根据更新后的地图,进行路径规划、避障 和导航等决策,以实现自主移动和环境感知。
移动机器人导航: 占据栅格地图算法为移动机器人提供 了环境感知和导航的能力。机器人可以利用生成的地图进行 路径规划,避免障碍物,达到目标位置。
环境建模和监测: 占据栅格地图算法可以用于环境建模 和监测任务,如室内定位、三维地图重建等。机器人可以通 过扫描环境,生成地图并实时更新,从而对环境进行建模和 监测。
自主避障: 利用占据栅格地图,机器人可以识别和避免 障碍物。通过实时更新地图,机器人可以检测到新出现的障 碍物并规避,保证机器人的安全和导航效果。

占据栅格地图算法在机器人感知和决策中具有广泛的应用价值,为机器人提供了环境感知、路径规划和决策等功能,使机器人能够在复杂和未知的环境中自主地进行移动和任务 执行。它在自动驾驶、室内导航、环境监测和机器人控制等 领域有着重要的应用。
三种算法的性能分析
这三种算法的复杂度包括环境条件、传感器质量、算法实现和参数设置等。此外,不同的算法可能在不同的场景和 任务上表现更好。
然而,就整体而言,FastSLAM 2.0 通常被认为是比 EKF- SLAM和FastSLAM1.0更准确的算法,尤其是在具有大量 特征点(地标)的复杂环境中。这是因为 FastSLAM 2.0 使用 了一种粒子滤波器的变种,它能够更好地处理非线性和非高 斯的系统和测量模型。
相比之下,EKF-SLAM和FastSLAM1.0都使用了扩展 卡尔曼滤波器(EKF),该滤波器对非线性和非高斯的模型的 逼近可能会引入估计误差。尤其是在高度非线性的情况下, 如机器人在大幅度旋转或存在非线性传感器失真的情况下, EKF-SLAM 和 FastSLAM 1.0 可能会产生较大的估计误差。
然而,值得强调的是,算法的准确性还受到实际应用中 其他因素的影响。例如,传感器噪声、地标检测和数据关联的准确性、初始化质量以及算法参数的选择都会对准确性产生影响。因此,在具体的应用中,对于特定的问题和环境,综合考虑各种因素,选择适合的SLAM算法是必要的。
SLAM 在认知科学领域的发展前景和改进
经过一个学期的课堂学习和资料的查阅,我对 SLAM 这个算法,总结了一些可以改进的方面。
SLAM 算法在认知科学领域有着广阔的发展前景。随着传感器技术和计算能力的不断提高,SLAM算法可以在实 时、高精度的环境感知和自主导航中发挥越来越重要的作 用。以下是 SLAM 算法在认知科学领域的发展前景和一些 改进的替代方法:
1. 多传感器融合:将多种传感器数据(如激光雷达、摄 像头、惯性测量单元)融合在一起,可以提高SLAM算法的 鲁棒性和准确性。例如,将视觉 SLAM 与激光 SLAM 相结 合,可以在不同的环境条件下实现更好的感知和建图。
2. 深度学习与 SLAM 的结合:深度学习技术在图像处 理和感知任务中取得了重大突破,将其与 SLAM 算法结合 可以提高环境感知和地图构建的准确性。例如,通过深度学 习方法实现语义分割、目标检测和姿态估计,可以提供更丰 富的地图信息和语义理解。
3. 视觉惯性 SLAM(Visual-Inertial SLAM):结合视觉
和惯性传感器的信息可以提供更准确和鲁棒的位置和姿态估 计。视觉惯性 SLAM 在自主导航、增强现实和虚拟现实等领 域具有潜在的应用价值。
4. 非线性优化方法:改进 SLAM 算法的非线性优化方 法可以提高估计的准确性。例如,基于图优化的方法,如 因子图优化(Factor Graph Optimization)和非线性优化技术
(如 GTSAM),可以更好地处理大规模的 SLAM 问题,提高 估计的稳定性和精度。
5. 实时性和效率:随着实时应用需求的增加,改进 SLAM 算法的实时性和效率是一个重要的方向。例如,基于 快速搜索和并行计算的方法可以提高算法的运行速度,以适 应实时应用的要求。
附件声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/Monodyee/article/detail/390224
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

