
热门标签
热门文章
- 1C语言数据结构——二叉树_二叉树结构体定义c语言
- 2操作系统进程调度实验报告_操作系统进程调度实验报告 系统要求用户先输入进程的数量,然后依次输入每个进程的
- 3YoloV5的学习与使用
- 4专业创新实践报告--YOLO v3算法详解以及和Faster-RCNN的比较_yolo算法流程图
- 5点击劫持漏洞原理和复现_点击劫持漏洞复现
- 6轻松搭建分布式对象存储:Spring Boot整合MinIO的快速指南_开源 对象存储搭建
- 7前端代码规范常见错误 一
- 8git clone时出现的两种报错及解决办法_autodl 不能git_git无法 clone
- 9开源大模型Llama 3来了:Meta才是真正的“OpenAI“_meta-llama-3 只是文本模型,不支持多模态
- 10虚拟机配置yum源_虚拟机sr0
当前位置: article > 正文
89、基于STM32单片机自动跟随小车 红外遥控控制小车避障模式 跟随模式设计 (程序+原理图+PCB源文件+流程图+硬件设计资料+元器件清单等)_小车自动与摇控转换
作者:Monodyee | 2024-04-28 07:10:33
赞
踩
小车自动与摇控转换
一、设计简介:
本设计是基于STM32单片机自动跟随小车 红外遥控控制小车避障模式 跟随模式设计,主要实现以下功能:
1、以STM32F103RBT6为主控芯片,实现对小车的控制,使小车能够做出前进、后退、左转、右转等基本行驶动作,通过红外遥控控制小车工作模式的转换(自由行走避障模式、跟随模式);
2、利用压力传感器测重,放在小车上物品的重量在500g范围以内可以跟随,如果超过范围,就停止不动,蜂鸣器响提示超重
主要硬件组成:
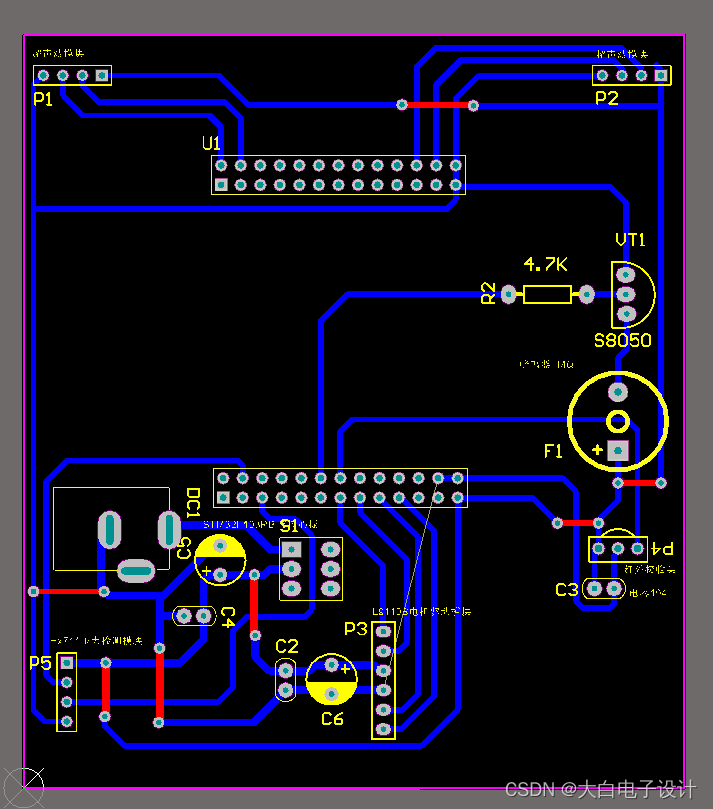
STM32单片机+时钟晶振电路+复位电路(上电自复位,手动复位)+超声波模块+Hx711检测模块+L9110S电机驱动模块+蜂鸣器+红外接收头遥控+电源供电电路
二、原理图

三、PCB图
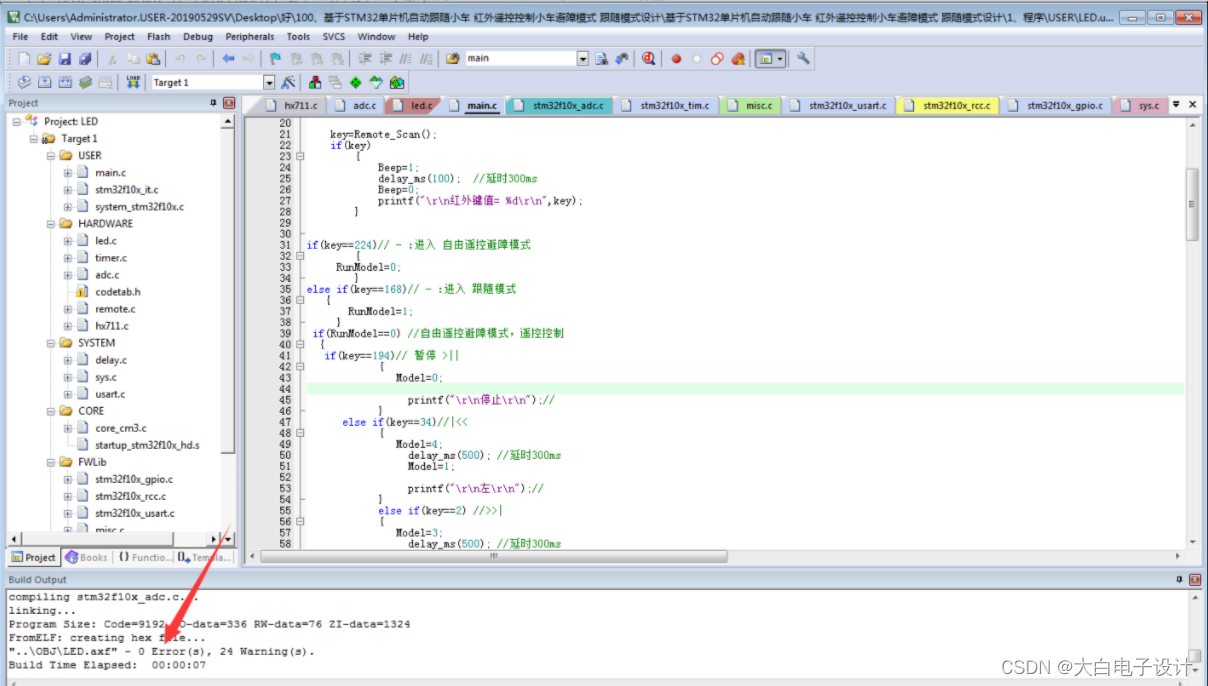
四、程序源码
五、资源获取

本项目包含的所有文件都可以点击下面的名片,发送 “ 89、基于STM32单片机自动跟随小车 红外遥控控制小车避障模式 跟随模式设计 ” 获取!
项目纯手打,不是免费的哦~
希望可以帮到你哈!
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/Monodyee/article/detail/500987
推荐阅读

相关标签

