
转载:https://blog.csdn.net/lingyunxianhe/article/details/79063547怕时间久了失效,转载以供后续使用和在上面做批注。里边添加了自己对部分的理解,红字标识。
一、SIFT算法
1.算法简介
尺度不变特征转换即SIFT (Scale-invariant feature transform)是一种计算机视觉的算法。它用来侦测与描述影像中的局部性特征,它在空间尺度中寻找极值点,并提取出其位置、尺度、旋转不变量,此算法由 David Lowe在1999年所发表,2004年完善总结。
局部影像特征的描述与侦测可以帮助辨识物体,SIFT特征是基于物体上的一些局部外观的兴趣点而与影像的大小和旋转无关。对于光线、噪声、些微视角改变的容忍度也相当高。基于这些特性,它们是高度显著而且相对容易撷取,在母数庞大的特征数据库中,很容易辨识物体而且鲜有误认。使用 SIFT特征描述对于部分物体遮蔽的侦测率也相当高,甚至只需要3个以上的SIFT物体特征就足以计算出位置与方位。在现今的电脑硬件速度下和小型的特征数据库条件下,辨识速度可接近即时运算。SIFT特征的信息量大,适合在海量数据库中快速准确匹配。
SIFT算法的实质是在不同的尺度空间上查找关键点(特征点),并计算出关键点的方向。SIFT所查找到的关键点是一些十分突出,不会因光照,仿射变换和噪音等因素而变化的点,如角点、边缘点、暗区的亮点及亮区的暗点等。
1.1哪些是SIFT要查找的关键点
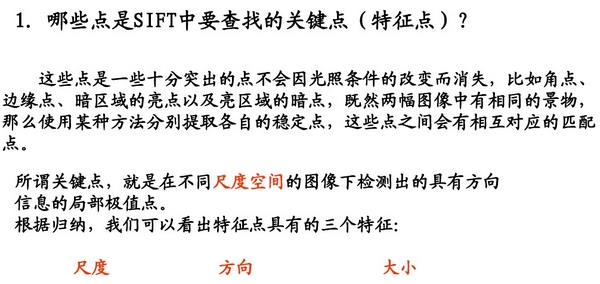
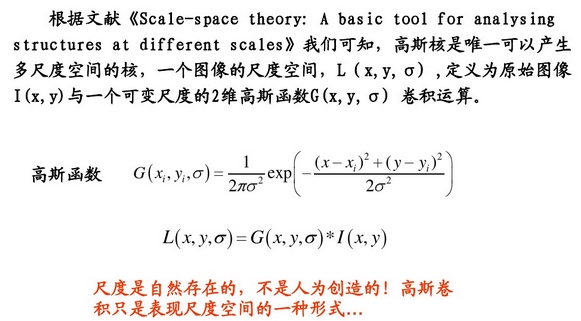
1.2什么是尺度空间
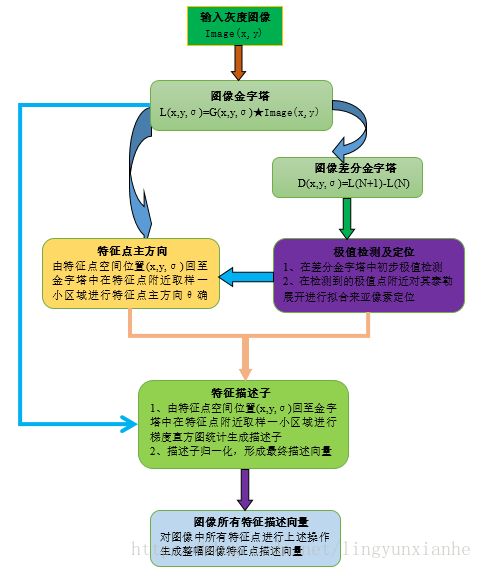
2.算法流程
二、SIFT算法操作步骤
1.图像金字塔
1.1高斯金字塔
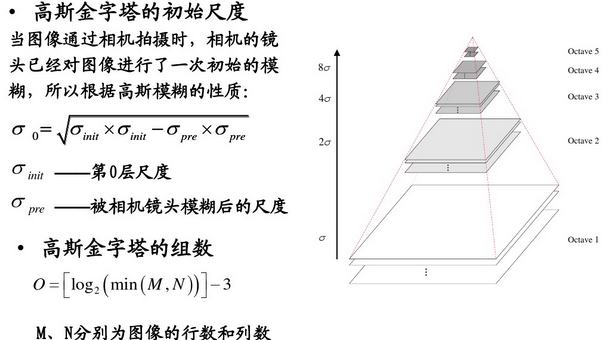
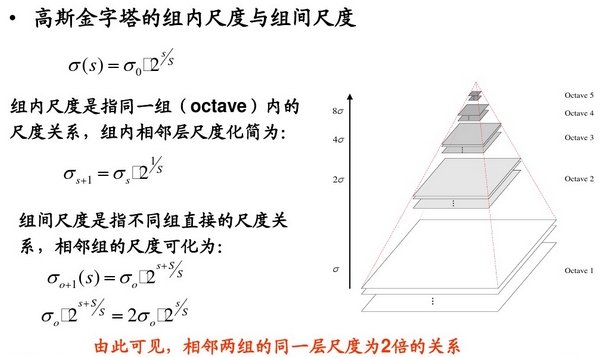
图像高斯金字塔(Gaussian Pyramid)是采用高斯函数对图像进行模糊以及降采样处理得到。其形成过程可如下图所示:
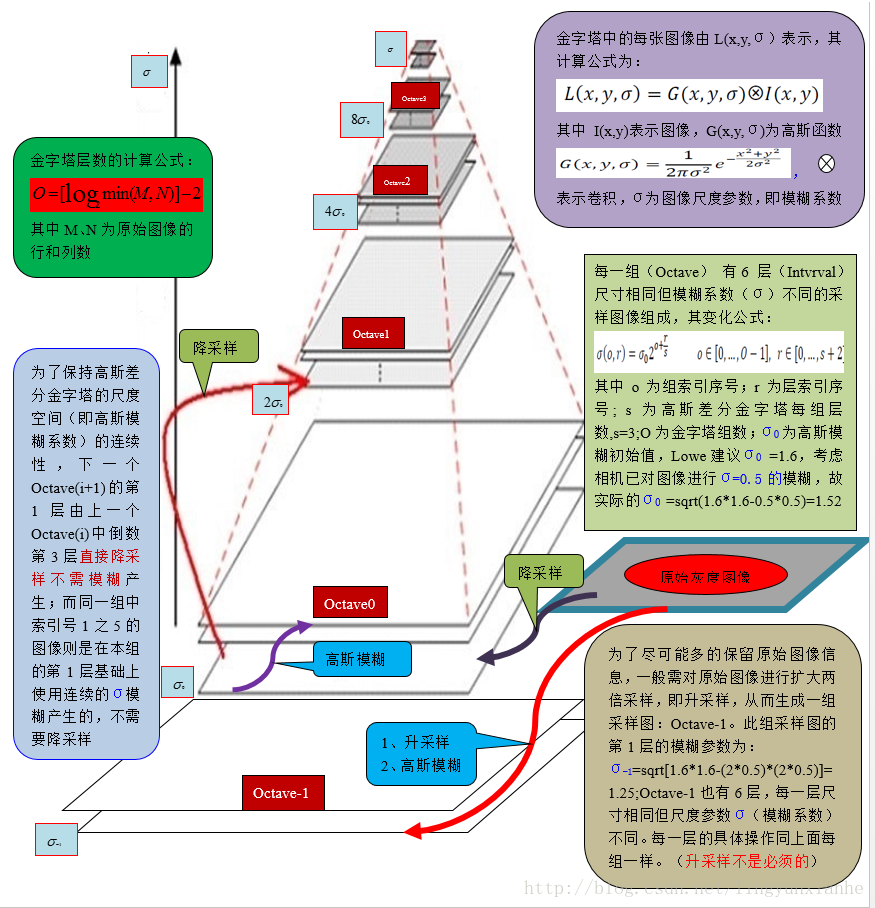
其中高斯模糊系数计算公式如下:

sigma0为基准层尺度(图像的初始尺度),o为组坐标(组数的索引值),r为每组层数的索引值,s为寻找极值点的尺度空间的组数,默认值为3(Lowe推荐为3)
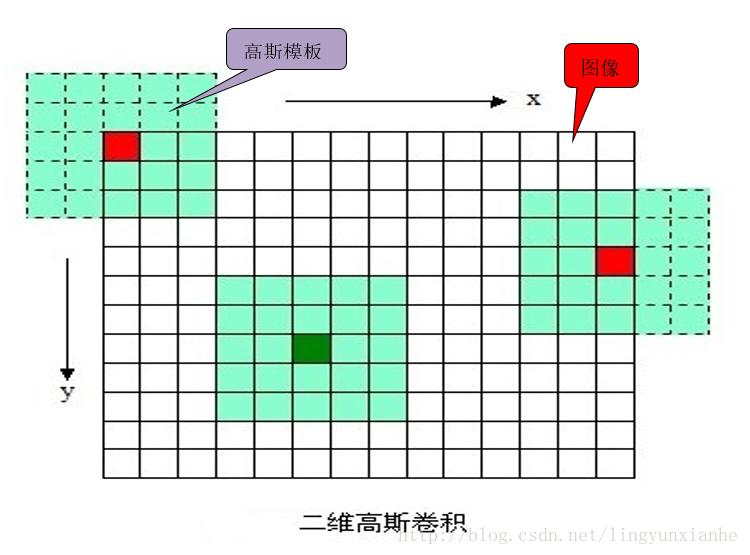
1.1.1高斯函数与图像卷积
根据3σ原则,使用NxN的模板在图像每一个像素点处操作,其中N=[(6σ+1)]且向上取最邻近奇数。
其操作如下图:
1.1.2分离高斯卷积
上面这样直接与图像卷积,速度比较慢,同时图像边缘信息也会损失严重。后来,后来,不知哪位学者发现,可以使用分离的高斯卷积(即先用1xN的模板沿着X方向对图像卷积一次,然后用Nx1的模板沿着Y方向对图像再卷积一次,其中N=[(6σ+1)]且向上取最邻近奇数),这样既省时也减小了直接卷积对图像边缘信息的严重损失。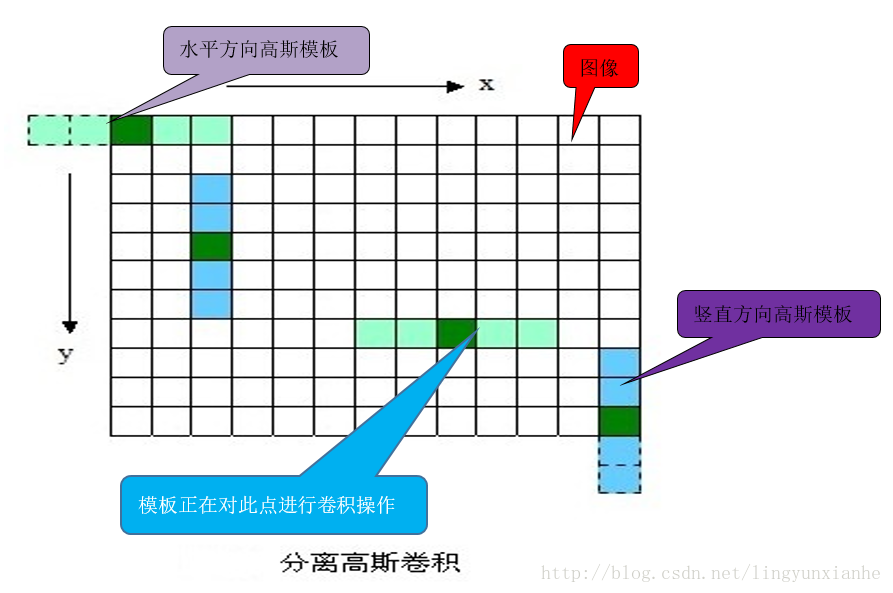
1.1.3高斯金字塔源码分析
1.2高斯差分金字塔
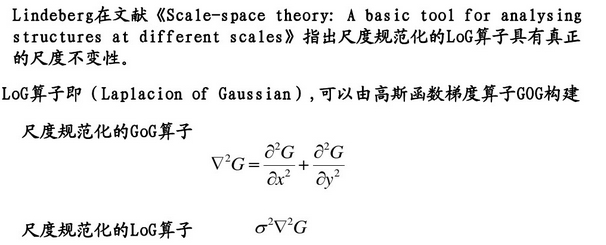
2002年Mikolajczyk在详细的实验比较中发现尺度归一化的高斯拉普拉斯函数的极大值和极小值同其它的特征提取函数,例如:梯度,Hessian或Harris角特征比较,能够产生最稳定的图像特征。而Lindeberg早在1994年就发现高斯差分函数(简称DOG算子)与尺度归一化的高斯拉普拉斯函数非常近似。如下式:

其中k-1是个常数,并不影响极值点位置的求取。
证明:
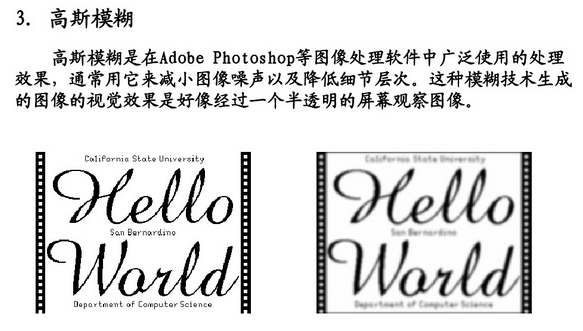
高斯模糊是一种图像滤波器,它使用正态分布(高斯函数)计算模糊模板,并使用该模板与原图像做卷积运算,达到模糊图像的目的。

N维空间正态分布方程为:

其中, 是正态分布的标准差,值越大,图像越模糊(平滑)。r为模糊半径,模糊半径是指模板元素到模板中心的距离。如二维模板大小为m*n,则模板上的元素
是正态分布的标准差,值越大,图像越模糊(平滑)。r为模糊半径,模糊半径是指模板元素到模板中心的距离。如二维模板大小为m*n,则模板上的元素


