
热门标签
热门文章
- 12022计算机保研经历_计算所保研
- 2JAVA IO流学习
- 3AI剪辑软件:智能剪辑,轻松高效
- 4C++优先队列priority_queue_template argument for template type parameter must
- 52024-04-04 问AI: 在深度学习中,微调是什么?
- 6iclr是什么会议_用 ICLR 论文求婚,除了撒“高级狗粮”,还能缓解「过拟合」与「过平滑」...
- 7PaddleOCR使用笔记之配置文件的详细解释_python paddleocr 详细参数
- 8文本聚类(一)—— LDA 主题模型_lda模型文本分类
- 9基于Django在线鲜花水果购物商城系统设计与实现(Pycharm+Python+Mysql)
- 10【Claude3 最新注册教程】Claude Pro 付费订阅教程,Claude Pro多5倍使用量_claude3注册
当前位置: article > 正文
机械臂Matlab仿真——路径规划之三阶多项式路径点规划以及五阶多项式路径点规划_机械臂五次轨迹规划函数matlab
作者:weixin_40725706 | 2024-03-26 04:47:56
赞
踩
机械臂五次轨迹规划函数matlab
仿真平台:Matlab 2019b 实时编辑器(旧的版本好像没有这几个路径规划函数)
机械臂路径点跟踪有几个基本方法:三阶多项式拟合,五阶多项式拟合以及抛物线拟合(理论来自于《机器人学导论》作者:Jhon J.Craig,这里不再赘述)
原理都不难,编程难度应该也不大,但是刚好新版本的matlab更新了这几个函数(能拿来用为什么要自己写)因此本节简单介绍这两个路径规划函数的使用:
- 三阶路径规划:cubicpolytraj
- 五阶路径规划:quinticpolytraj
1.三阶多项式规划函数
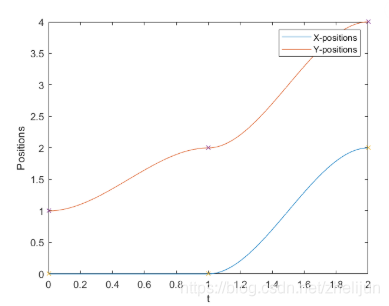
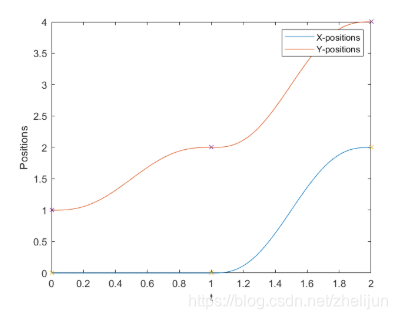
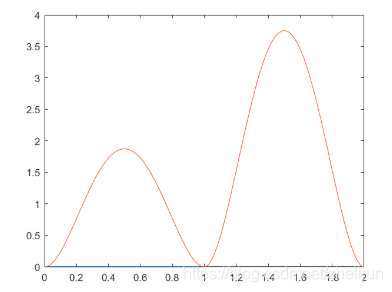
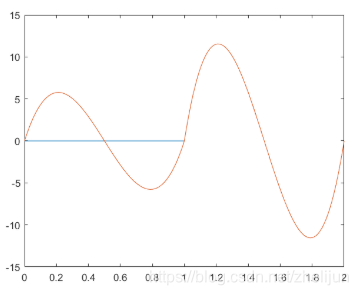
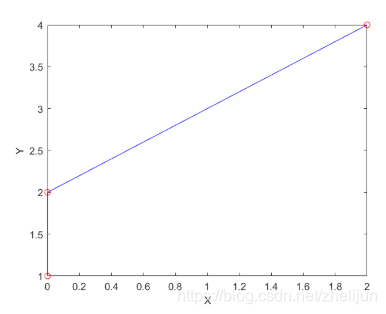
%假设是个二维机器人,关节空间下,关节(q1,q2)从(0,1)运动到(0,2),再到(2,4) wpts = [0 0 2;1 2 4]; %初始时间是0s,终点时间是2s tpts = [0:2]; %仿真所用的时长为2s,仿真时间间隔为0.01s tvec = 0:0.01:2; %利用三阶多项式进行路径规划,得到的结果是规划出来的路径q,速度qd,加速度qdd,已经三阶多项式的全部系数pp [q, qd, qdd, pp] = cubicpolytraj(wpts, tpts, tvec); %看看规划出来的路径q1 与q2 plot(tvec, q) hold all %看三个waypoints,用小叉表示,不是字母x plot(tpts, wpts, 'x') xlabel('t') ylabel('Positions') legend('X-positions','Y-positions') hold off %看q的速度 plot(tvec, qd) %q的加速度 plot(tvec, qdd) %用2D图看关节空间的整个变化情况 figure plot(q(1,:),q(2,:),'-b',wpts(1,:),wpts(2,:),'or') xlabel('X') ylabel('Y')

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
仿真结果
q的变化以及各个路径点
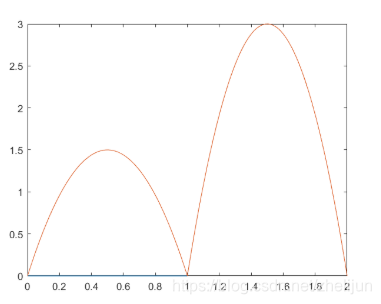
q的速度
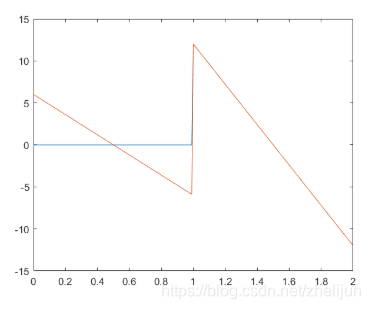
q的加速度
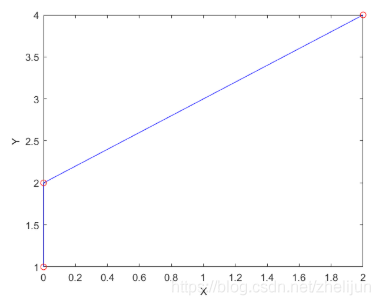
x y 二维图
2.五阶多项式路径规划函数
代码跟上面完全一样,只需要改一下路径规划语句对应的函数名
%假设是个二维机器人,关节空间下,关节(q1,q2)从(0,1)运动到(0,2),再到(2,4) wpts = [0 0 2;1 2 4]; %初始时间是0s,终点时间是2s tpts = [0:2]; %仿真所用的时长为2s,仿真时间间隔为0.01s tvec = 0:0.01:2; %利用三阶多项式进行路径规划,得到的结果是规划出来的路径q,速度qd,加速度qdd,已经三阶多项式的全部系数pp [q, qd, qdd, pp] = quinticpolytraj(wpts, tpts, tvec); %看看规划出来的路径q1 与q2 plot(tvec, q) hold all %看三个waypoints,用小叉表示,不是字母x plot(tpts, wpts, 'x') xlabel('t') ylabel('Positions') legend('X-positions','Y-positions') hold off %看q的速度 plot(tvec, qd) %q的加速度 plot(tvec, qdd) %用2D图看关节空间的整个变化情况 figure plot(q(1,:),q(2,:),'-b',wpts(1,:),wpts(2,:),'or') xlabel('X') ylabel('Y')
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
仿真结果
q1,q2的变化以及各个路径点
q的速度
q的加速度
q1,q2的二维图像
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/weixin_40725706/article/detail/314719
推荐阅读
相关标签

