
- 1Unable to find method'com.android.build.gradle.api.BaseVariant.getOutputs()Ljava/util/List' 构建错误解决办法_unable to find method ''void com.android.build.api
- 2selenium携带cookies启动,请求
- 3Erlang、RabbitMQ下载与安装教程(windows超详细)_windows环境下载和安装erlang
- 4极狐GitLab 15.7 版本发布,更多代码托管、CI/CD、安全合规更新【八】
- 5【C++】GoogleTest入门指南_google test 比较double
- 6前端开发入门:包管理工具bower_前端 bower是什么
- 7第十四届蓝桥杯大赛软件赛省赛Java 大学 C 组_2.分糖果 两种糖果分别有9个和16个,要全部分给7个小朋友,每个小朋友得到的糖果总p
- 8自然语言处理(NLP)的开发框架_自然语言处理 开源技术
- 9自动化运维|云原生架构下的产品自动化发布、快速部署和持续交付实战之路_运维自动化应用发布
- 10100个python算法超详细讲解:汉诺塔问题_汉诺塔递归算法及详解python
自动驾驶系统概述
赞
踩
自动驾驶车辆作为一个复杂的软硬件结合系统,其安全可靠运行需要车载硬件、传感器集成、感知规控等多个模块配合工作。在一定程度上而言,自动驾驶的核心技术可分为:感知定位、决策规划、控制执行3个层次(类似于人的感知器官、大脑以及四肢),对应不同的工作层级。
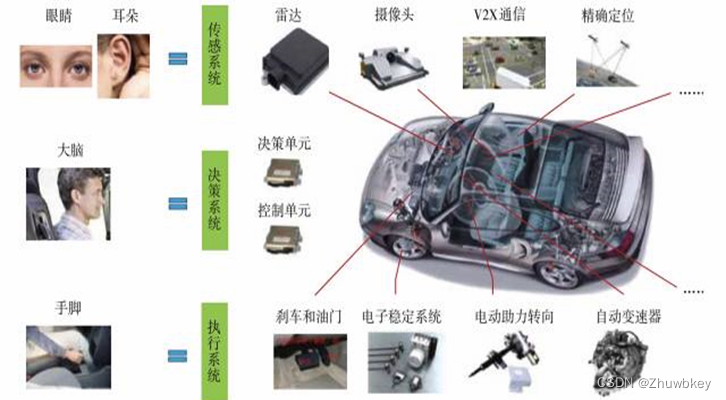
(图片来源网络,如有侵权,联系删除)
1.感知定位
利用各种主动、被动传感器获取周围环境信息,对传感器数据进行处理、融合、理解,实现车辆对行驶环境中的障碍物、车道线及道路交通标志的检测以及自车相对于环境的位置信息,给车辆路径规划提供依据。是自动驾驶车辆安全、自主、可靠行驶的前提和基础。包括图像识别技术,障碍物检测技术,多元信息融合技术,传感器冗余设计技术等。(如下图泊车过程为例)
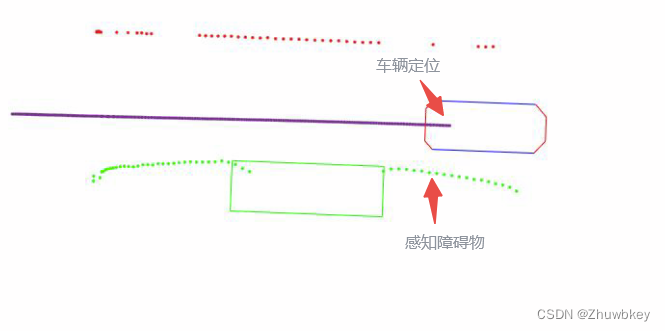
Fig1. 泊车过程中的感知定位示意图
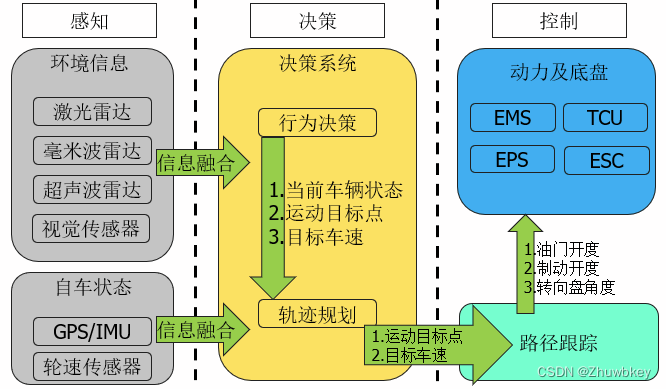
2.决策规划
依据感知定位提供的车辆定位和周边环境数据,在平台上根据适当的算法模型进行路径规划等决策实现车辆从出发地安全到达目的地;在广义上可分为路由寻径、行为决策、动作规划三个部分。包括危险事态建模技术、危险预警于控制优先级换份,群体决策和协同技术,局部轨迹规划,驾驶员多样性影响分析等。(如下图泊车过程示意图)
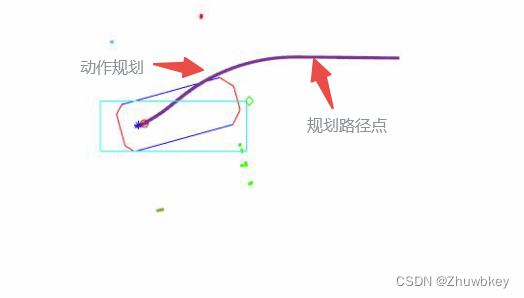
Fig2. 泊车过程中决策规划示意图
路由寻径:负责相对顶层的路径规划,实现车辆软件系统内部的导航功能,在宏观层面指导无人车软件系统的规划控制模块按照什么样的道路行驶。
行为决策:接受路由寻径的结果,同时接收感知预测和地图信息,在宏观上决定车辆如何行驶,包括正常跟车、遇交通灯和行人时等待避让,路口交替通行等。
动作规划:根据行为决策结果和车辆运动学限制,规划出车辆行驶方向、速度等一系列动作以达到目标位置。
3.控制执行
控制执行作为自动驾驶系统的最底层,直接和车辆底层控制接口CAN BUS对接。核心任务是接受上层动作规划的输出轨迹点,通过一系列结合车身属性和外界物理因素的动力学计算,转换成对车辆油门、刹车及方向盘的控制信号,尽可能保证车辆去执行这些轨迹点。包括面向驱动/制动的纵向运动控制、面向转向的横向运动控制、基于驱动/制动/转向/悬架的底盘一体化控制、融合车路协同通信及车载传感器的多车队列系统和车路系统控制等。

