
- 1PHP实现URL长连接转短连接方法总结_php 长链接转为短连接
- 22022年NOC大赛编程马拉松赛道Python决赛初中组A卷真题,包含答案解析_编程马拉松python组题目
- 3vue 滚动到指定位置scrollIntoView
- 4华为云开发者学堂——学习笔记_华为开发者学堂课程材料咋下载
- 5python抓取网站88titienmae88中的“图片区”所有图片
- 6SDWebUI:AI绘图本地部署及绘图效率实验_sd webui aki
- 7八)Stable Diffussion使用教程:MultiDiffusion
- 8android为什么要打包(签名)?及 apk 打包(签名)流程_apk 打包key
- 9proc/sys/net/ipv4/下各项的意义
- 10如何用加密技术守护你的数字世界(5):单向散列函数
yolov8目标检测 部署瑞芯微rk3588记录
赞
踩
1. 前置条件
本地电脑系统,ubuntu20.04
训练代码:
训练代码下载的ultralytics官方代码
SHA:6a2fddfb46aea45dd26cb060157d22cf14cd8c64
训练代码仅做数据修改,类别修改,代码结构未做任何修改
需要准备的代码:
pt转onnx :
- git clone https://github.com/airockchip/ultralytics_yolov8.git
- cd ultralytics_yolov8
- git checkout 5b7ddd8f821c8f6edb389aa30cfbc88bd903867b
onnx转rknn:
- #环境所需要的包
- https://github.com/airockchip/rknn-toolkit2/releases/tag/v1.6.0
-
- #转换所需要的代码
- https://github.com/airockchip/rknn_model_zoo/releases/tag/v2.0.0
rknn仿真和板卡上所需要的代码
- #和onnx转rknn是一个代码
- https://github.com/airockchip/rknn_model_zoo/releases/tag/v2.0.0
2. pt转onnx
这里参照这位大佬的方案,rk3588's yolov8 model conversion from pt to rknn | Memories,这里只取他pt转onnx的部分,如下图部分

步骤跟他的一模一样,使用他制作的镜像环境,我本地试过,不使用他的环境也行,可以使用训练代码的环境进行导出,我本地用conda创建的一个python=3.9的环境,安装的最新的pytorch和ultralytics。
使用他给的链接拉取的转换代码后,需要修改的地方只有一处,如图所示,改成自己模型的名字,mode:export

然后将自己的pt模型放到下载的ultralytics_yolov8根目录下,如图所示

按照他的教程执行,主要这一句export 一定要执行!!!,执行完后会在pt文件同级目录下会生成的onnx文件,如上图所示,我执行完之后,生成了drone.onnx

3. onnx转rknn
3.1. rknn环境安装
- 我的本地电脑系统为ubuntu20.04,下载rknn_toolkit2的1.6.0版本(这里和板卡上使用的toolkit2-2.0.0 版本不一致,但是可以正常推理,一致的版本我还没试过),下载地址
Release v1.6.0 · airockchip/rknn-toolkit2 · GitHub
- rknn环境安装
- #下载toolkit2代码后解压,使用conda创建一个python=3.9的环境
- conda create -n npu-test python=3.9
-
- #激活环境,安装必要的库
- conda activate npu-test
-
- #进入到1.6版本的rknn-toolkit2文件夹下
- cd rknn-toolkits-1.6.0/rknn-toolkits/packages
-
- #依赖库安装
- pip install -r requirements_cp39-1.6.0.txt -i https://pypi.tuna.tsinghua.edu.cn/simple
-
- #这里使用清华源安装会比较快,但是一般情况会报一个错误,有一个库下载不下来,如下图

继续在这里输入以下内容进行安装,tf-es那一坨从终端里面进行复制,避免敲错了
pip install tf-estimator-nightly==2.8.0.dev2021122109 -i https://pypi.org/simple
执行完后,如图所示,tf-es就安装成功了

紧接着再继续安装requirements中的剩余的依赖库,重新执行
pip install -r requirements_cp39-1.6.0.txt -i https://pypi.tuna.tsinghua.edu.cn./simple
所有库都安装好以后,开始安装rknn包,进入到下载的1.6.0版本的rknn-toolkit2文件夹下
- cd rknn-toolkits-1.6.0/rknn-toolkits/packages
-
- pip install rknn_(按Tab自动弹出来)-cp39(按Tab补充完整) .whl
安装完成后,如下图所示,则表示rknn环境已经安装好了

3.2. rknn模型转换
- 下载rknn_model_zoo,我使用的是2.0.0的版本
Release v2.0.0: Support RK3576 and RKNPU1 · airockchip/rknn_model_zoo · GitHub
- 下载完成后解压,进入目录rknn_model_zoo/examples/yolov8/model,修改coco_80_labels_list.txt内容,修改为自己模型对应的类别

因为我只有2类别,人和车,所以我把文件修改为以下内容 (一定要和训练的时候训练集名字对应)

- 开始转换
激活rknn虚拟环境
conda activate npu-test
进入到下载的rknn_model_zoo中yolov8的示例中
cd rknn_model_zoo/examples/yolov8/python
如图所示

此时拷贝第2步中转换的onnx模型路径,我是把转换得到的onnx拷贝到该路径下的,
rknn_model_zoo/examples/yolov8/model
然后执行以下命令开始转换,
python convert.py ../model/drone.onnx rk3588
如下图开始转换

等待片刻,导出完成,如图所示

转换完成后会在onnx文件同目录下得到一个名为yolov8.rknn模型
4. 板卡环境配置
3.1 rk3588板卡环境
rk3588的系统为Linux系统,版本为 ubuntu20.04
3.2 npu2 驱动版本
连接上板卡输入 dmesg | grep -i rknpu,如图所示,npu驱动版本为 0.8.8
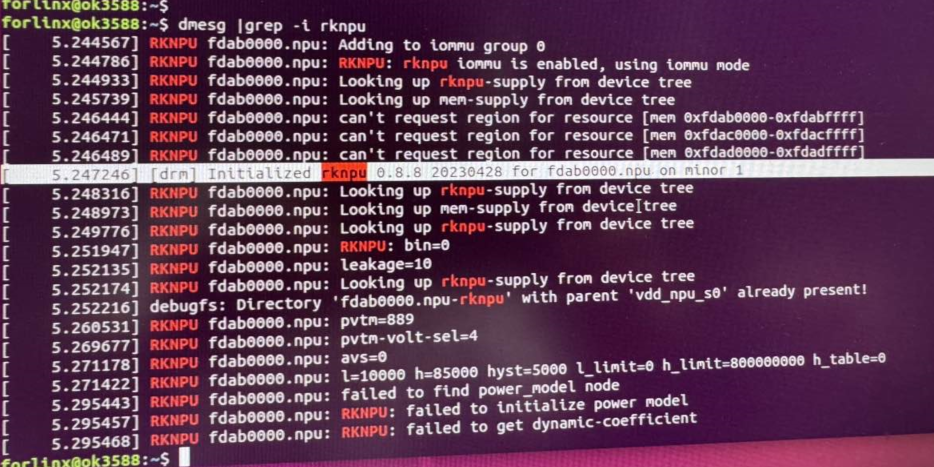
在rknn_toolkit2 doc的官方文档中01_Rockchip_RKNPU_Quick_Start_RKNN_SDK_V2.0.0beta0_CN.pdf
中建议驱动版本大于 0.9.2,但是由于没找到对应的驱动版本,手里的版本驱动只有 0.7.2和 0.8.8两个版本, 都测试过,均可完成正常推理。

3.3 npu环境
进入板卡系统,输入以下指令
查询 rknn server版本
strings /usr/bin/rknn_server | grep -i "rknn_server version"
查询 librknnrt.so库版本
string /usr/lib/librknnrt.so | grep -i "librknnrt version"

注意:二者的版本必须一致
若输出不一致,需要做以下处理,下载rknn_toolkit2,我使用的是rknn_toolkit2-v2.0.0版本
- 将下载下来的文件拷贝到板卡上,将下面对应文件拷贝对板卡的对应位置
- sudo cp rknn-toolkit2/rknpu/runtime/Linux/rknn_server/aarch64/usr/bin/* /usr/bin/
- sudo cp rknn-toolkit2/rknpu/runtime/Linux/librnkk_api/aarch64//* /usr/lib/
- 给rknn_server赋予可执行权限
- sudo chmod +x /usr/bin/rknn_server
- sudo chmod +x /usr/bin/start_rknn.sh
- sudo chmod +x /usr/bin/restart_rknn.sh
- 紧接着重启服务
- cd /usr/bin
- ./restart_rknn.sh
如图所示,打印出版本后,就可以用ctrl+c关闭掉

若开始使用strings查询版本不一致,或者没有打印或者版本过低,此时再查询板卡npu版本,二者版本一致才行

5. adb仿真
adb仿真就是使用在电脑上配置上rk环境,然后使用typeC连接电脑和板卡,使用电脑环境仿真rk板卡的推理,目的是验证rknn模型是否正常,如果能正常推理,说明rknn的整个转换过程是正常的,否则就是找rknn转换问题了,如果上述步骤都是正常进行的,这adb仿真可以略过
心得:踩坑半个月,一直没找到无法正常推理的原因,也不知道是模型转换问题还是c++代码问题,所以找到rknn_model_zoo说明文档,尝试使用adb连接仿真,最后发现官方download下来的onnx转换rknn后可以推理,但是自己的模型转换rknn就不行,才发现是自己转换的onnx模型不对,这样才一步一步找原因,最后才找到正确的转换方法。
- 本地电脑安装adb
sudo apt install adb- 查询板卡device id
adb devices执行完后,如果连接正常,如下图会打印设备的device id,复制该id,下面会使用
adb仿真还是使用第3步骤中的rknn_model_zoo,进入目录rknn_model_zoo/examples/yolov8/python,修改yolov8.py代码,CLASSES修改为自己模型的类别, coco_id_list修改为自己模型对应的序号,我这里就是二分类,我的修改内容如图所示

搜索main函数,还需要修改以下内容

--model_path那一行 default修改为 自己导出的rknn模型的绝对路径
--target那一行 default修改为 rk588
--device_id那一行, default修改为上一步中复制下来的device id
--img_show那一行, default修改为 True, 仿真时候会显示仿真的推理结果
将待测试的图片放到py文件的上一级的model路径下,如图所示

然后在电脑端,conda进入第3步创建rknn虚拟环境中,执行python yolov8.py,如果顺利的话,执行完就会在电脑上显示推理结果,能正常推理的话,表示rknn模型无误,可以进行下一步的c++板卡部署。
注意:如果这里报错了,进入板卡终端,进入/usr/bin目录下,执行./restart_rknn.sh 不关闭,然后再在电脑端进入rknn虚拟环境,再执行python yolov8.py进行仿真推理
6. 板卡c++部署
- 修改源码
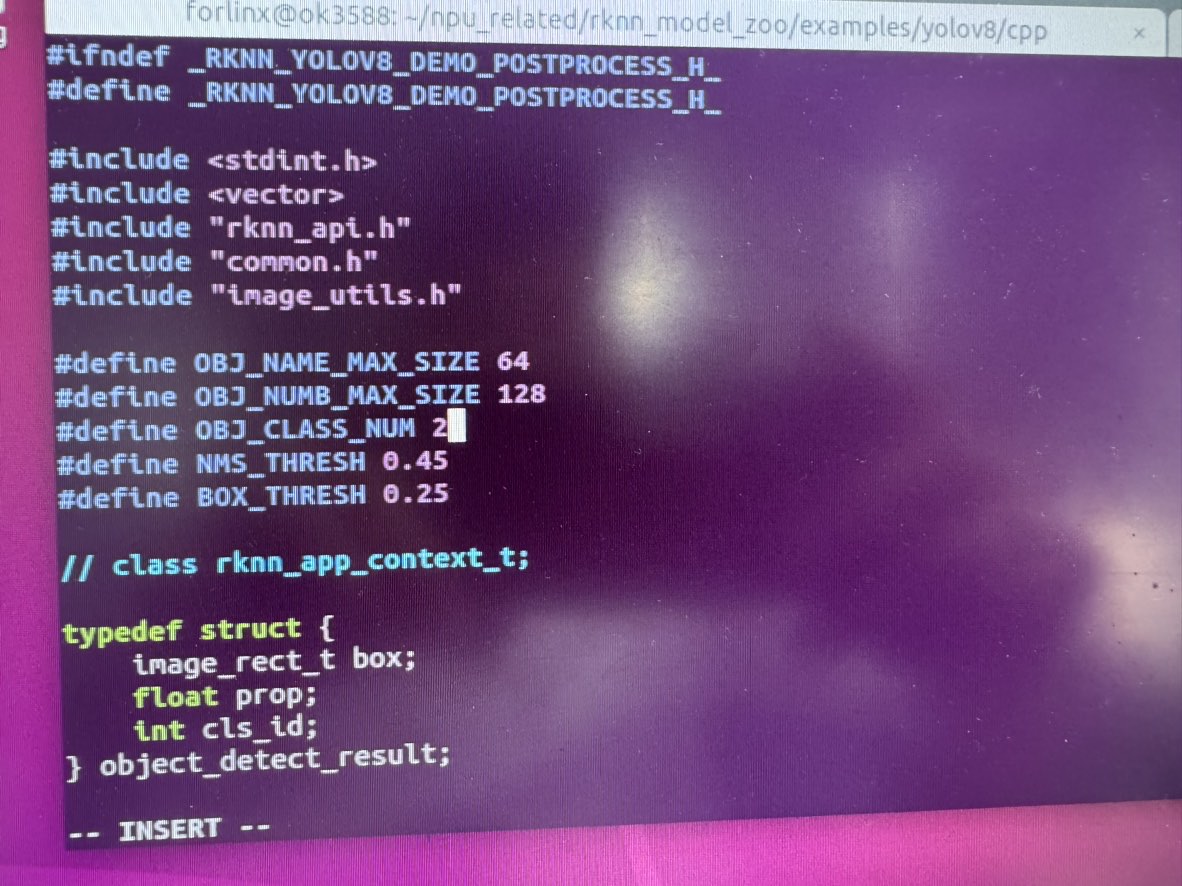
现将第3步中用到的rknn_model_zoo推送到板卡中,修改rknn_model_zoo中关于yolov8的代码,修改代码的路径为: /rknn_model_zoo/examples/yolov8/cpp/postprocess.h
第12行代码,#define OBJ_CLASS_NUM 修改为自己需要检测的目标类别数量
我自己需要检测两类,所以这里我修改为 #define OBJ_CLASS_NUM 2,如图所示
- 开始编译
进入rknn_model_zoo根目录下,执行以下命令开始编译
先给脚本权限
chmod 777 build-linux.sh再编译
./build-linux.sh -t rk3588 -a aarch64 -d yolov8- 编译完成后会在跟目录下生成install文件夹
一直按Tab直到进入最里面文件夹,我本地的路径为:
rknn_model_zoo/install/rk3588_linux_aarch64/rknn_yolov8_demo
该路径下,有一个可执行文件rknn_yolov8_demo以及一个model和一个lib文件夹内,修改model下的coco文本文件,修改为自己需要检测目标类别
- 开始推理
./rknn_yolov8_demo [rknn路径] [图片路径]执行完成后,会在rknn_yolov8_demo下生成out.png文件,将该图片导出到电脑可以验证推理是否正确

