
热门标签
热门文章
- 1IntelliJ IDEA Maven加载超时问题_connect to repo.maven.apache.org:443 [repo.maven.a
- 2【数据结构】初识数据结构与复杂度总结
- 3github项目的JAVA项目Ratel,基于Netty实现_github上java项目
- 4【华为机试】2024年真题C卷(java)-按身高和体重排队_按身高和体重排队java面试题
- 5L2_042老板的作息表:字符串排序的力量_7-6 老板的作息表 新浪微博上有人发了某老板的作息时间表,表示其每天 4:30 就起床
- 6RabbitMq(四) -- 交换机(rabbitmq的工作模式)_rabbitmq 交换机
- 7乐趣无限:10款基于Pygame的经典游戏合集_pygame小游戏
- 8Go语言的100个错误使用场景(61-68)|并发实践
- 9android tf卡及u盘_在Android中读写U盘
- 10RabbitMQ之延迟队列_rabbitmq延迟队列插件
当前位置: article > 正文
Ubuntu 20.04 + Livox mid 70 运行Livox mapping_ubuntu mid-70
作者:weixin_40725706 | 2024-04-24 21:02:43
赞
踩
ubuntu mid-70
一. 环境配置
参考官方文档: https://github.com/Livox-SDK/livox_mapping
1. 安装 PCL 1.8.1 与VTK 7.1.1 版本(版本不对应可能报错),参考Linux 下 OpenCV-3.4.1+VTK7.1.1+PCL1.8.1编译安装教程(Ubuntu16.04,Ubuntu18.04系统,ARM/X86架构都适用)_编译 opencv vtk_xiaohai@Linux的博客-CSDN博客
pcl编译报错解决参考: Ubuntu20.04安装PCL1.8.0编译错误(全网最全~)_小方只会百度的博客-CSDN博客
2. 20.04自带opencv4,没有额外安装opencv。
3. 编译livox_mapping,遇到找不到头文件等问题,跟Loam中的一样的方法解决。
LeGO-LOAM编译错误 #include<opencv/cv.h> 找不到_#include opencv/cv,h_勇敢凡凡的博客-CSDN博客
二. 设备连接
Livox_view , Livox_SDK , Livox_ros_driver 安装使用参考:
大疆Livox Mid-70雷达的使用_LacyExsale的博客-CSDN博客
三:结果显示
运行中Rivz不显示地图数据,参考ROS调试问题记录Fixed Frame [map] does not exist_libenfan的博客-CSDN博客
运行的结果:

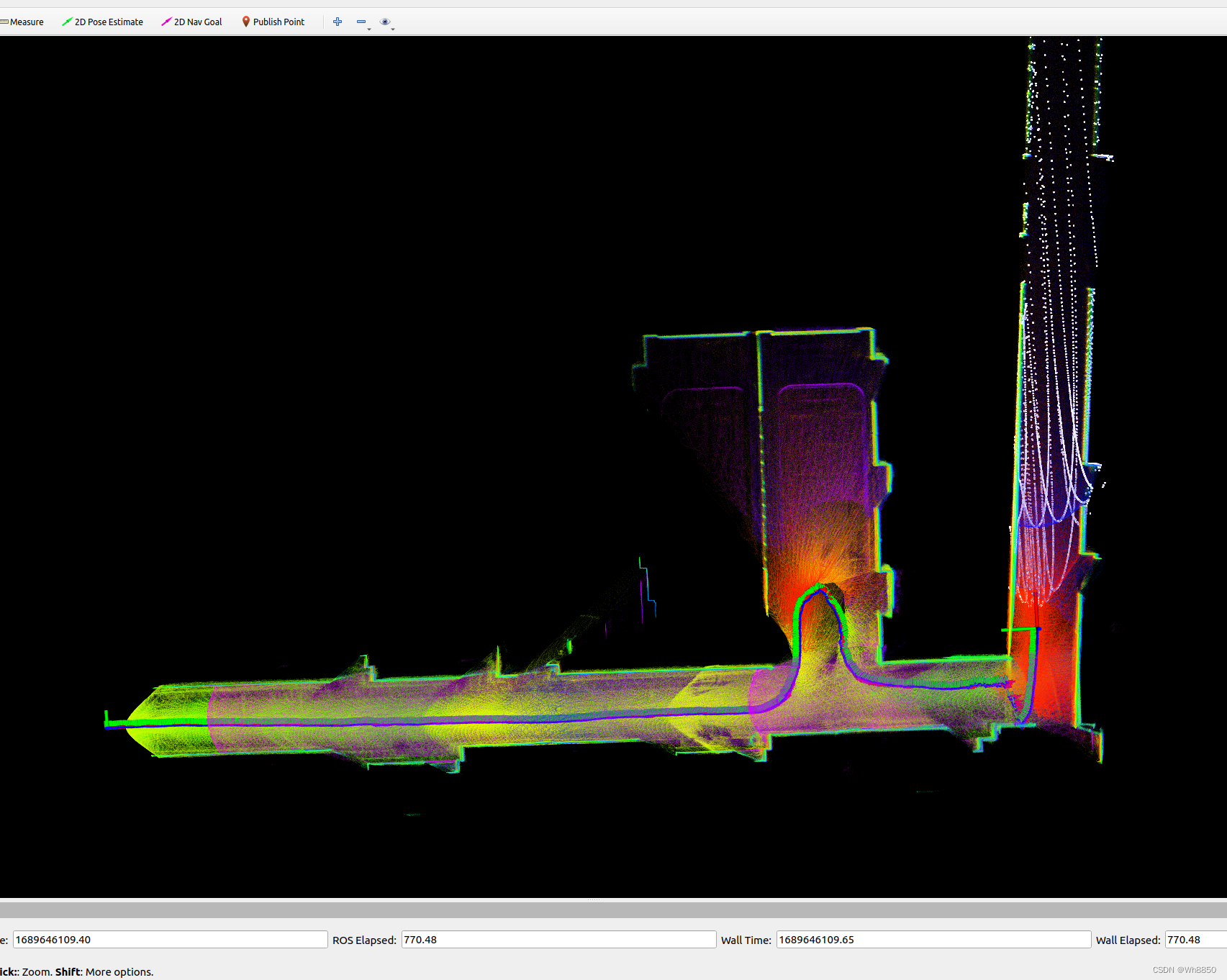
mid70 点云还是比较稀疏,转弯快容易漂移
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/weixin_40725706/article/detail/481525
推荐阅读
相关标签

