
- 1RabbitMQ配置文件_修改RabbitMQ MQTT的1883端口_rabbitmq 1883
- 2RabbitMQ学习(八):死信队列_rabbitmq死信队列实战
- 3微信小程序 form-data传参_微信小程序formdata传参
- 4【C++进阶:哈希--unordered系列的容器及封装】
- 5直接生成16秒高清视频 我国自研视频大模型Vidu在京发布
- 6【史上最强】还原你的声音,GPT-SoVITS在windows下安装使用技巧_gpt-sovits下戴
- 7ubuntu部署fastgpt+oneApi_one-api 配置
- 8改变世界-生成式人工智能
- 9day05 类型转换 循环分支结构
- 10LM Studio:一个桌面应用程序,旨在本地计算机上运行大型语言模型(LLM),它允许用户发现、下载并运行本地LLMs_lmstudio 运行什么模型
L298N 直流电机驱动模块与 Arduino_nema17步进电机 l298n
赞
踩
L298N 直流电机驱动模块与 Arduino
L298N 电机驱动器可以控制两个直流电机的速度和旋转方向。
此外,它还可以控制双极步进电机,例如NEMA 17。如果您想了解更多信息,请查看本教程。

L298N电机驱动器和Arduino控制步进电机:Control Stepper Motor with L298N Motor Driver & Arduino (lastminuteengineers.com)
控制直流电机
只有当我们可以控制直流电机的速度和旋转方向时,我们才能完全控制它。
- PWM – 控制速度
- H桥 – 控制车轮方向
让我们进一步了解这些技术。
直流电机的速度可以通过改变其输入电压来控制。实现此目的的一种广泛使用的技术是脉宽调制(PWM)。
PWM是一种通过发送一系列ON-OFF脉冲来调整输入电压平均值的技术。该平均电压与脉冲的宽度成正比,称为占空比。
占空比越高,施加到直流电机的平均电压就越高,从而导致电机速度增加。占空比越短,施加到直流电机的平均电压越低,导致电机速度降低。
下图显示了具有各种占空比和平均电压的PWM技术。
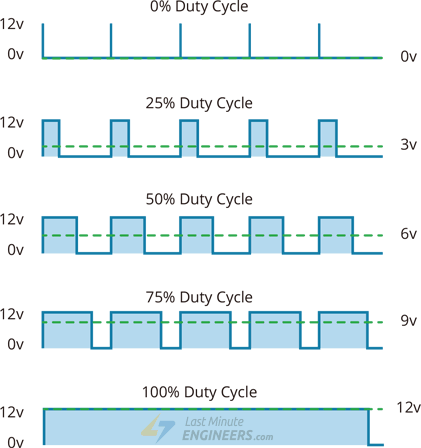 脉宽调制(PWM)技术
脉宽调制(PWM)技术
H桥 – 控制车轮方向
直流电机的旋转方向可以通过改变其输入电压的极性来控制。实现此目的的一种广泛使用的技术是使用 H 桥。
H桥电路由四个排列成H形的开关组成,电机位于中心。
同时关闭两个特定开关可反转施加到电机的电压的极性。这会导致电机旋转方向发生变化。
以下动画显示了 H 桥电路的工作原理。
 H桥工作
H桥工作
L298N 电机驱动芯片
模块的中心是一个大的黑色芯片,带有一个厚实的散热器 - L298N。
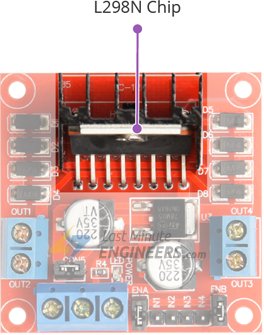
L298N芯片包含两个标准H桥,能够驱动一对直流电机,非常适合构建两轮机器人平台。
L298N 电机驱动器的电源范围为 5V 至 35V,每通道能够提供 2A 的连续电流,因此它与我们的大多数直流电机配合得很好。
技术规格
以下是规格:
| 电机输出电压 | 5V – 35V |
|---|---|
| 电机输出电压(推荐) | 7V – 12V |
| 逻辑输入电压 | 5V – 7V |
| 每通道连续电流 | 2一 |
| 最大功耗 | 25 |
有关更多详细信息,请参阅下面的数据表。
L298N 电机驱动器模块引脚排列
L298N 模块有 11 个引脚,允许它与外界通信。引脚排列如下:
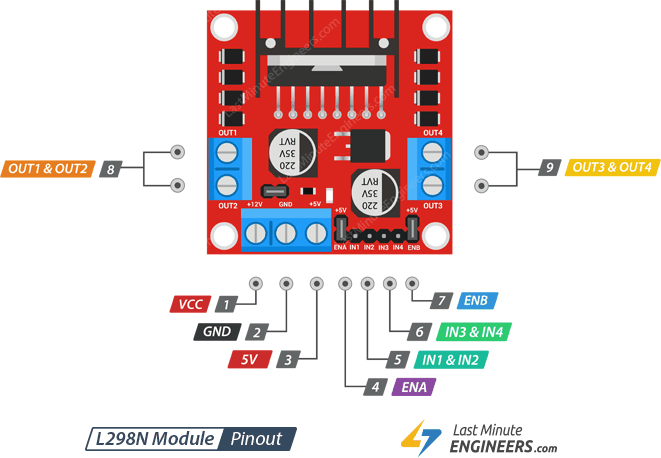

电源引脚
L298N 电机驱动器模块从 3 针 间距3.5mm螺丝端子接收电源。
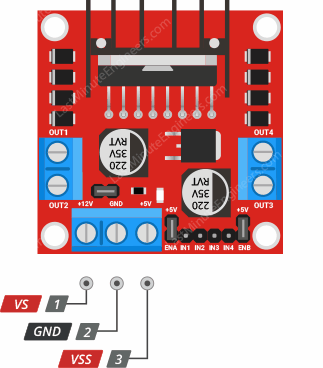
L298N 电机驱动器有两个输入电源引脚:VS 和 VSS。
VS引脚为 IC 的内部 H 桥供电,该桥驱动电机。该引脚接受 5V 至 12V 的输入电压。
VSS用于为 L298N IC 内的逻辑电路供电,范围为 5V 至 7V。
接地是公共接地引脚。
输出引脚
L298N电机驱动器的输出通道,输出 1 和输出 2用于电机 A 和输出 3 和输出 4对于电机 B,用两个 3.5mm 间距的螺丝端子断开到模块的边缘。您可以将两个 5-12V 直流电机连接到这些端子。
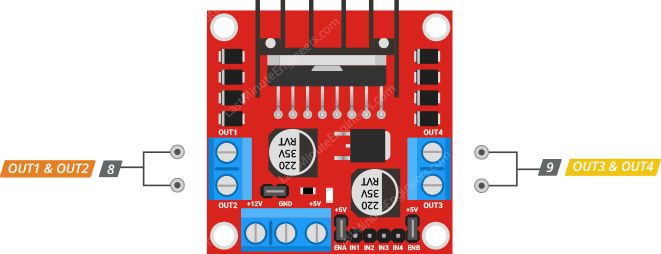
模块上的每个通道可为直流电机提供高达 2A 的电流。然而,提供给电机的电流量取决于电机电源的容量。
方向控制引脚
方向控制引脚允许您控制电机是向前还是向后旋转。这些引脚实际上控制着L298N芯片内H桥电路的开关。
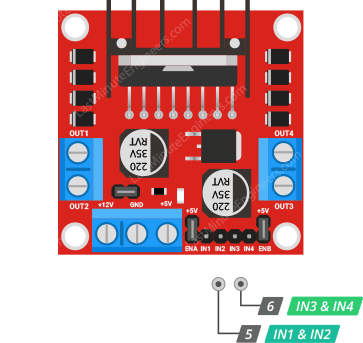
该模块有两个方向控制引脚。这IN1 和 IN2销控制电机A的旋转方向;而IN3 和 IN4控制电机B的旋转方向。
电机的旋转方向可以通过对这些输入施加逻辑高电平(5V)或逻辑低电平(接地)来控制。下图显示了各种组合及其结果。
| 输入1 | 输入2 | 车轮方向 |
|---|---|---|
| 低(0) | 低(0) | 电机关闭 |
| 高(1) | 低(0) | 向前 |
| 低(0) | 高(1) | 向后 |
| 高(1) | 高(1) | 电机关闭 |
速度控制引脚
速度控制引脚ENA和ENB用于打开/关闭电机并控制其速度。
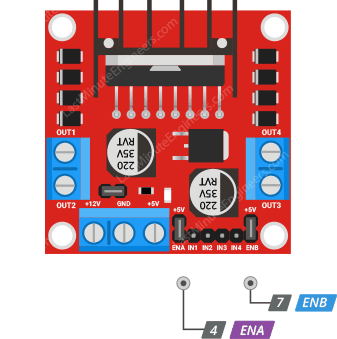
将这些引脚拉高会导致电机旋转,而将它们拉低将停止它们。通过脉宽调制(PWM),可以控制电机的速度。
该模块通常在这些引脚上带有跳线。当此跳线就位时,电机全速旋转。如果要以编程方式控制电机的速度,请卸下跳线并将它们连接到Arduino的PWM引脚。
板载 5V 稳压器和跳线
该模块包括一个 78M05 5V 稳压器,可通过跳线使能或禁用。
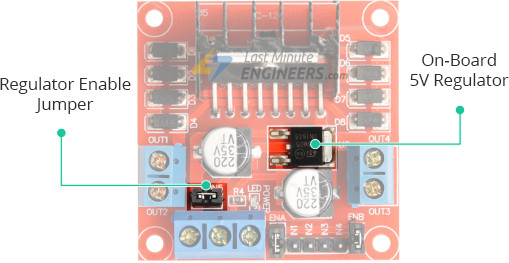
当此跳线就位时,5V稳压器使能,逻辑电源(VSS)从电机电源(VS)派生。在这种情况下,5V输入端子充当输出引脚,提供5V 0.5A电流。您可以使用它为 Arduino 或其他需要 5V 电源的电路供电。
当跳线被移除时,5V稳压器被禁用,我们必须通过VSS引脚单独提供5V。
警告:
如果电机电源小于 12V,则可以将跳线保持在原位。如果大于12V,则必须拆下跳线,以防止损坏板载5V稳压器。
此外,当跳线就位时,请勿同时为 VSS 和 VS 引脚供电。
L298N的压降
L298N 的压降约为 2V。这是因为内部开关晶体管在正向偏置时的压降约为1V,并且由于H桥需要电流通过两个晶体管,因此总压降为2V。
因此,如果将 12V 连接到电机电源端子,电机将接收大约 10V。这意味着 12V 直流电机永远不会全速旋转。
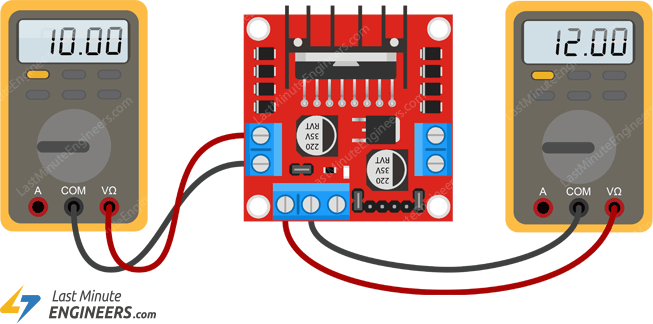
为了使电机以最大速度运行,电机电源的电压应略高于电机的实际电压要求(+2V)。
考虑到2V的压降,如果使用5V电机,则需要在电机电源端子提供7V。如果您有 12V 电机,那么您的电机电源电压应为 14V。
这种过大的压降会导致热量耗散。这就是为什么基于 L298N 的电机驱动器需要一个大散热器的原因。
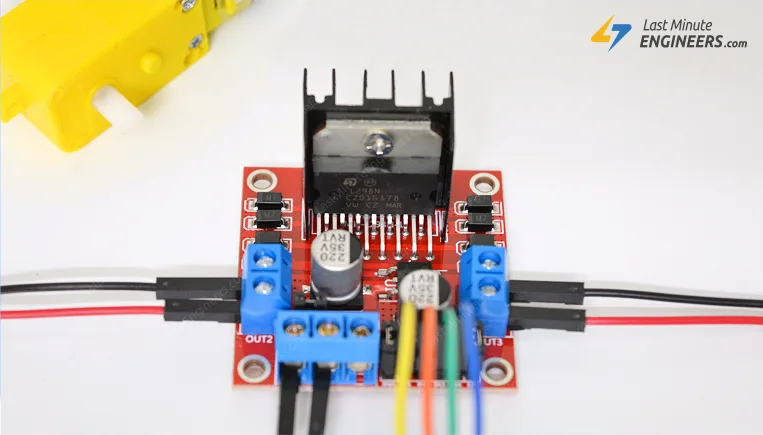
将 L298N 电机驱动器模块连接到 Arduino
现在我们已经了解了有关该模块的所有信息,我们可以开始将其连接到我们的Arduino!
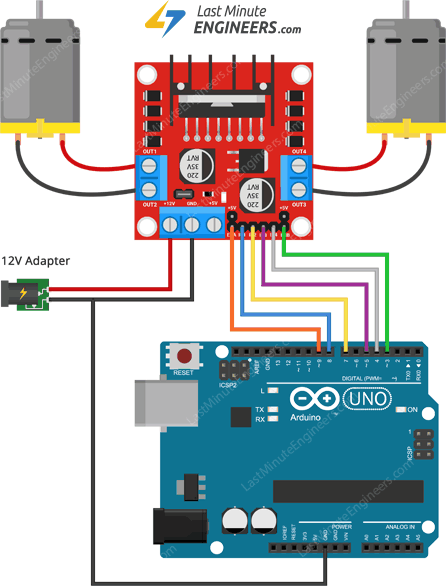
让我们从连接电机电源开始。在我们的实验中,我们使用直流变速箱电机,也称为“TT”电机,常见于两轮驱动机器人中。它们的额定电压为 3 至 12V。因此,我们将外部 12V 电源连接到 VS 端子。由于L298N的压降约为2V,因此电机将接收10V并以略低的RPM旋转。不过没关系。
接下来,我们需要为 L298N 的逻辑电路提供5V。我们将使用板载 5V 稳压器从电机电源吸收 5V,因此请将 5V-EN 跳线固定到位。
现在,将 L298N 模块的输入和使能引脚(ENA、IN1、IN2、IN3、IN4 和 ENB)连接到六个 Arduino 数字输出引脚(9、8、7、5、4 和 3)。请注意,Arduino 输出引脚 9 和 3 均支持 PWM。
最后,将一个电机连接到端子 A(OUT1 和 OUT2),另一个连接到端子 B(OUT3 和 OUT4)。您可以更换电机的连接。从技术上讲,没有正确或错误的方法。
Arduino示例代码
下面的代码将向您展示如何使用 L298N 电机驱动器控制直流电机的速度和旋转方向,并可作为更多实际实验和项目的基础。
代码将电机沿一个方向移动一圈,然后沿相反方向移动。还涉及一些加速和减速。
加速或减速电机时,您可能会听到它发出嗡嗡声,尤其是在较低的 PWM 值下。这是正常的;没有什么可担心的。发生这种情况是因为直流电机需要最低的电压才能运行。
// Motor A connections int enA = 9; int in1 = 8; int in2 = 7; // Motor B connections int enB = 3; int in3 = 5; int in4 = 4; void setup() { // Set all the motor control pins to outputs pinMode(enA, OUTPUT); pinMode(enB, OUTPUT); pinMode(in1, OUTPUT); pinMode(in2, OUTPUT); pinMode(in3, OUTPUT); pinMode(in4, OUTPUT); // Turn off motors - Initial state digitalWrite(in1, LOW); digitalWrite(in2, LOW); digitalWrite(in3, LOW); digitalWrite(in4, LOW); } void loop() { directionControl(); delay(1000); speedControl(); delay(1000); } // This function lets you control spinning direction of motors void directionControl() { // Set motors to maximum speed // For PWM maximum possible values are 0 to 255 analogWrite(enA, 255); analogWrite(enB, 255); // Turn on motor A & B digitalWrite(in1, HIGH); digitalWrite(in2, LOW); digitalWrite(in3, HIGH); digitalWrite(in4, LOW); delay(2000); // Now change motor directions digitalWrite(in1, LOW); digitalWrite(in2, HIGH); digitalWrite(in3, LOW); digitalWrite(in4, HIGH); delay(2000); // Turn off motors digitalWrite(in1, LOW); digitalWrite(in2, LOW); digitalWrite(in3, LOW); digitalWrite(in4, LOW); } // This function lets you control speed of the motors void speedControl() { // Turn on motors digitalWrite(in1, LOW); digitalWrite(in2, HIGH); digitalWrite(in3, LOW); digitalWrite(in4, HIGH); // Accelerate from zero to maximum speed for (int i = 0; i < 256; i++) { analogWrite(enA, i); analogWrite(enB, i); delay(20); } // Decelerate from maximum speed to zero for (int i = 255; i >= 0; --i) { analogWrite(enA, i); analogWrite(enB, i); delay(20); } // Now turn off motors digitalWrite(in1, LOW); digitalWrite(in2, LOW); digitalWrite(in3, LOW); digitalWrite(in4, LOW); }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
代码说明:
Arduino代码相当简单。它不需要任何库即可工作。代码首先声明连接到 L298N 控制引脚的 Arduino 引脚。
// Motor A connections
int enA = 9;
int in1 = 8;
int in2 = 7;
// Motor B connections
int enB = 3;
int in3 = 5;
int in4 = 4;
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
在代码的设置部分,所有电机控制引脚(包括方向和速度控制引脚)都配置为数字输出。方向控制引脚被拉低以最初禁用两个电机。
void setup() {
// Set all the motor control pins to outputs
pinMode(enA, OUTPUT);
pinMode(enB, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
// Turn off motors - Initial state
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
在代码的循环部分,我们调用两个用户定义的函数,延迟一秒。
void loop() {
directionControl();
delay(1000);
speedControl();
delay(1000);
}
- 1
- 2
- 3
- 4
- 5
- 6
这些函数是:
-
directionControl()– 此功能使两个电机全速旋转两秒钟。然后,它反转电机的旋转方向并旋转两秒钟。最后,它停止电机。void directionControl() { // Set motors to maximum speed // For PWM maximum possible values are 0 to 255 analogWrite(enA, 255); analogWrite(enB, 255); // Turn on motor A & B digitalWrite(in1, HIGH); digitalWrite(in2, LOW); digitalWrite(in3, HIGH); digitalWrite(in4, LOW); delay(2000); // Now change motor directions digitalWrite(in1, LOW); digitalWrite(in2, HIGH); digitalWrite(in3, LOW); digitalWrite(in4, HIGH); delay(2000); // Turn off motors digitalWrite(in1, LOW); digitalWrite(in2, LOW); digitalWrite(in3, LOW); digitalWrite(in4, LOW); }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
-
speedControl()– 此函数使用 analogWrite() 函数生成 PWM 信号,该信号将两个电机从零加速到最大速度,然后再将它们减速回零。最后,它停止电机。void speedControl() { // Turn on motors digitalWrite(in1, LOW); digitalWrite(in2, HIGH); digitalWrite(in3, LOW); digitalWrite(in4, HIGH); // Accelerate from zero to maximum speed for (int i = 0; i < 256; i++) { analogWrite(enA, i); analogWrite(enB, i); delay(20); } // Decelerate from maximum speed to zero for (int i = 255; i >= 0; --i) { analogWrite(enA, i); analogWrite(enB, i); delay(20); } // Now turn off motors digitalWrite(in1, LOW); digitalWrite(in2, LOW); digitalWrite(in3, LOW); digitalWrite(in4, LOW); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
蓝牙控制机器人项目描述:
使用 L298N 电机驱动程序和 Android 手机应用程序制作 Arduino 蓝牙控制机器人汽车。
蓝牙 Arduino
蓝牙模块的 VCC 与 5 V连接.
地线,与Arduino的接地相连。
TX线,与Arduino的引脚2连接。
Rx 线,与 Arduino 的引脚编号 3 连接。
#include <SoftwareSerial.h> SoftwareSerial Blue(2, 3); int ena = 5; int enb = 6; int in1 = 8; int in2 = 9; int in3 = 10; int in4 = 11; long int data; long int command1 = 92; // forward long int command2 = 79; // left long int command3 = 71; // right long int command4 = 91; // Reverse long int command5 = 10; // stop char state = 0; void setup() { Serial.begin(9600); Blue.begin(9600); pinMode(ena, OUTPUT); pinMode(enb, OUTPUT); pinMode(in1, OUTPUT); pinMode(in2, OUTPUT); pinMode(in3, OUTPUT); pinMode(in4, OUTPUT); analogWrite(ena, 255); analogWrite(enb, 255); delay(1000); } void loop() { while (Blue.available() == 0) ; if (Blue.available() > 0) { data = Blue.parseInt(); } delay(100); //Serial.print(data); if (data == command1) // Forward { digitalWrite(in1, HIGH); digitalWrite(in2, LOW); digitalWrite(in3, LOW); digitalWrite(in4, HIGH); //delay(100); } if (data == command2) // left { digitalWrite(in1, LOW); digitalWrite(in2, LOW); digitalWrite(in3, LOW); digitalWrite(in4, HIGH); delay(100); } if (data == command3) // Right { digitalWrite(in1, HIGH); digitalWrite(in2, LOW); digitalWrite(in3, LOW); digitalWrite(in4, LOW); delay(100); } if (data == command4) // Reverse { digitalWrite(in1, LOW); digitalWrite(in2, HIGH); digitalWrite(in3, HIGH); digitalWrite(in4, LOW); delay(100); } if (data == command5) // Stop { digitalWrite(in1, LOW); digitalWrite(in2, LOW); digitalWrite(in3, LOW); digitalWrite(in4, LOW); // delay(100); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
使用L298N电机驱动器的Arduino避障机器人
作者:Paul Vertor in CircuitsArduino
简介:

在我们开始之前,您是否想过是为您的项目选择 Arduino 电机扩展板还是 L298N 电机驱动器?我个人更喜欢 L298N 电机驱动器,因为可以使用更多 Arduino 的引脚为我们的机器人添加更多功能!
1. 何时使用 Arduino 电机扩展板 L293D?
优势
首先,我们可以在机器人底盘上节省一些空间,而且与 L298N 电机驱动器相比,使用电机扩展板时用于接线的跳线要少得多。
其次,我们还可以使用 Adafruit 电机扩展板库通过软件设置电机速度并定义最大速度。
最后,Arduino和电机可以使用单个直流电源,之后扩展板将处理其余部分,以确保您的伺服和电机正常运行。
弊端
将引脚接头焊接到扩展板层上需要一些焊接技巧。此外,该扩展板使用 Arduino 计时器进行伺服操作,这可能会导致“AFMotor.h”(即 Adafruit Motor Shield)库和其他库之间的计时器冲突。最后但并非最不重要的一点是,一旦电流超过 1A,你可能希望在电机驱动器上安装一个散热器,否则会出现热故障,可能会烧坏芯片。
规格
您可以在此处查看有关扩展板规格的更多信息。
2. 何时使用L298N电机驱动器?
优势
它只需要一些接线 - 无需焊接。虽然这个模块没有预先构建的库,但可以使用Arduino的PWM(脉宽调制)引脚和一些简单的代码行来设置电机的速度。
这里对烧坏芯片的担忧要少得多,因为模块上的每个通道都可以向直流电机提供高达 2A 的电流,再加上一个大块的散热器可以保护模块免受可能的热故障的影响(顺便说一下,散热器使驱动器看起来更酷)。
由于我们可以使用所有Arduino的引脚(在电机扩展板上,可以使用的引脚数量减少了一半以上),因此有更多的引脚可用于更多功能!
弊
Arduino和电机驱动器分开放置将在机器人底盘上占用更多空间。电源和接地连接也可能需要额外的面包板。此外,在大多数情况下,Arduino和电机需要两个独立的直流电源。
如果电池电源无法提供恒定功率,您还可能会遇到一些奇怪的伺服操作,从而导致 Arduino 重置问题并导致伺服抖动或不工作。但不要担心 - 稍后我将介绍一种解决此问题的简单方法!
规格
以下是 lastminuteengineers.com 的规范:
“L298N 电机驱动器 IC 实际上有两个输入电源引脚:”Vss“和”Vs”。
从Vs引脚,H桥获得驱动电机的电源,可以是5至35V。Vss用于驱动5至7V的逻辑电路。他们共用一个’GND’。
在此处查看有关如何使用电机驱动器的更多信息。
第 1 步:
步骤 2:准备组件和工具
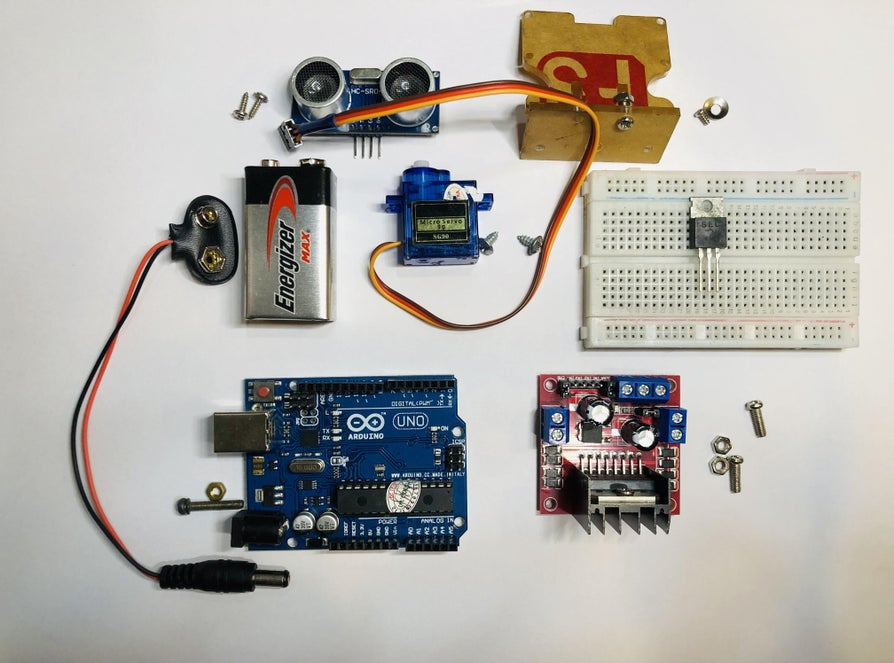

对于此项目,您将需要:
- HC-SR04超声波传感器
- 超声波传感器支架
- 伺服电机(我使用了SG90伺服)
- 三轮机器人底盘
- 小型面包板
- A 7805 稳压器
- 9伏电池(Arduino的电源)
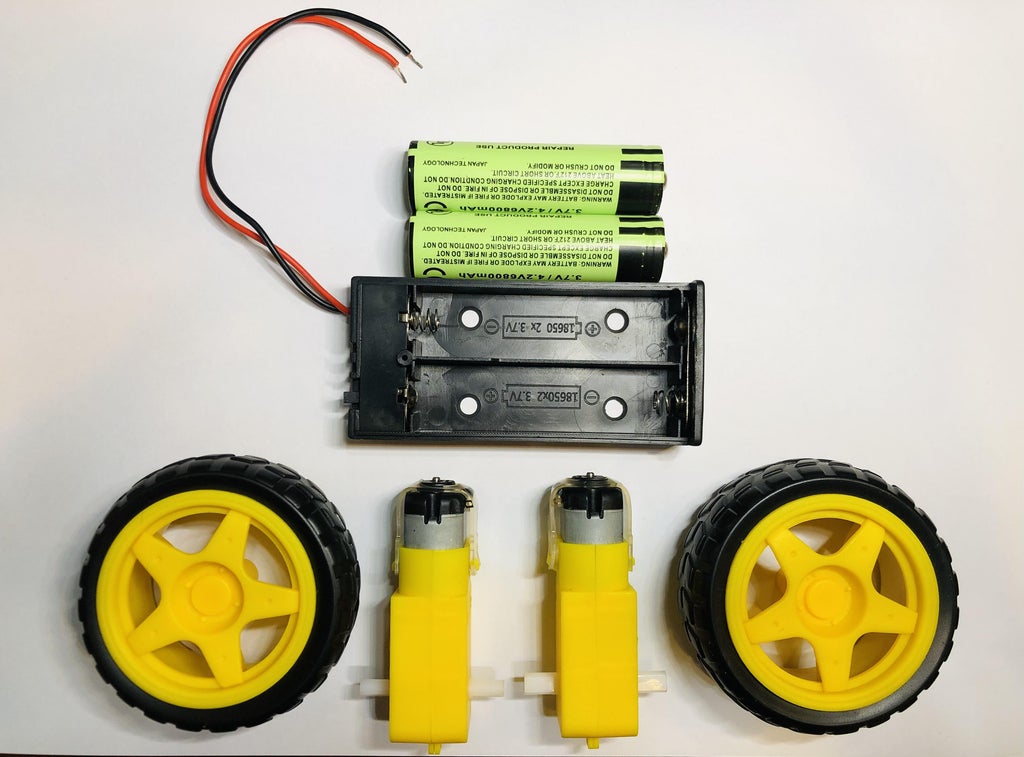
- 一个 9 V 电池直流插孔
- 两节 3.7 V 18650 锂离子电池(电机电源)
- 带开关的双插槽 18650 电池座
- 一个 Arduino Uno R3
- A / B 型USB电缆(用于将代码上传到Arduino)
- L298N 电机驱动器
- 两个橡胶轮
- 旋转脚轮/滚珠脚轮
- 两个 3-6 V DC 塑料电机(又名“TT”电机)
- 一些公-公和公-母跳线连接组件
将组件安装在机器人底盘上有许多选择,包括使用热胶、双面胶带或螺钉。
以下是您可能需要的一些额外工具:
- 热胶枪
- 剪刀
- 一把螺丝刀
- 万用表(如果您想精确测量电池的电压 - 我稍后会谈到这一点)
- 焊料、烙铁和传统海绵
- 18650 3.7 V 锂离子电池充电器(长期使用需要)
上面提到的焊接工具只是焊接的最低要求。可以在此处查看焊接的基本工具和材料以及如何焊接。
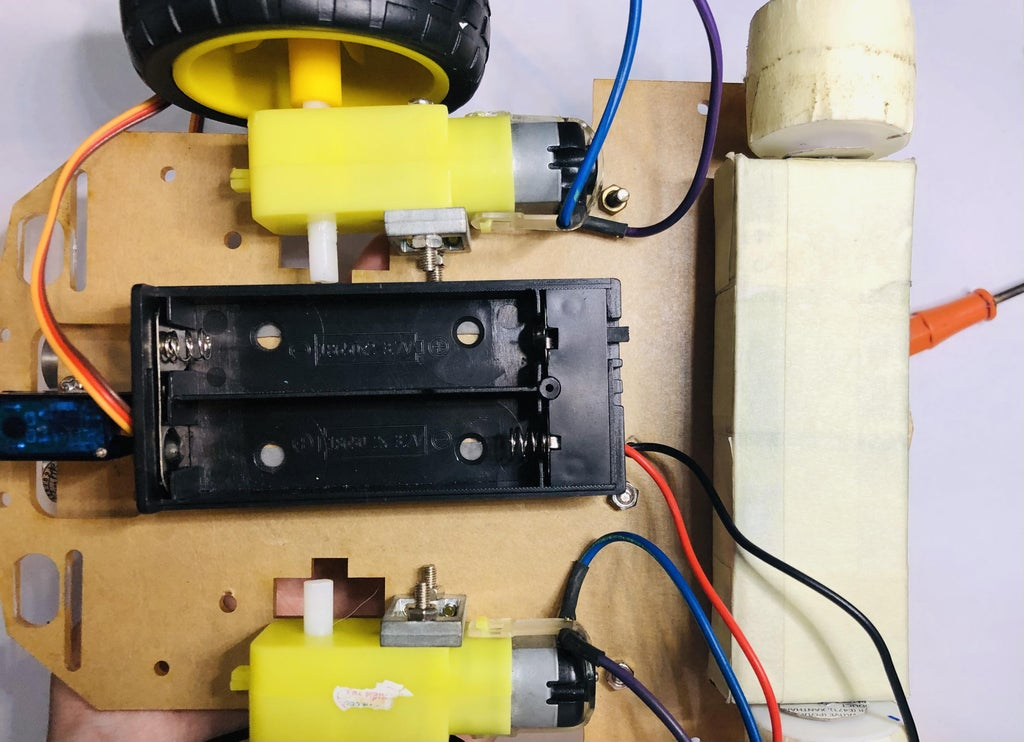
第 3 步:将跳线焊接到每个电机的端子 A&B


[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-WxcPt8RT-1678264694735)(null)]

3-6 V DC TT 电机上有两个端子。从现在开始,让我们称它们为终端 A 和 B。棘手的是,每个端子可以是A或B,具体取决于您将电机放置在机器人底盘上的方式。但规则很简单:将电机连接到机箱后,无论顶部的哪个端子是A,下面的另一个端子都是B.识别电机侧是A还是B是一个重要的过程,它将确保将电机的电线正确连接到L298N电机驱动器, 确保它将机器人的轮子沿所需方向旋转(向前方向或向后方向)。
现在,您只需要记住项目中两个电机的每个电机的端子 A 在哪里以及端子 B 的位置。
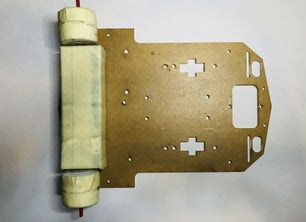
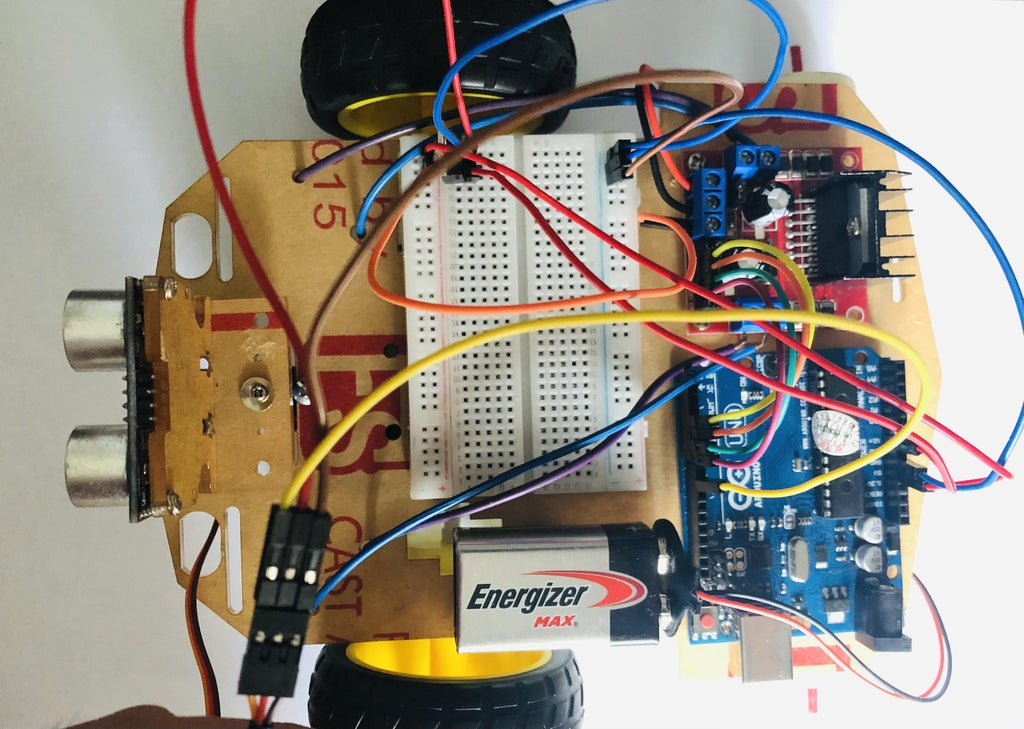
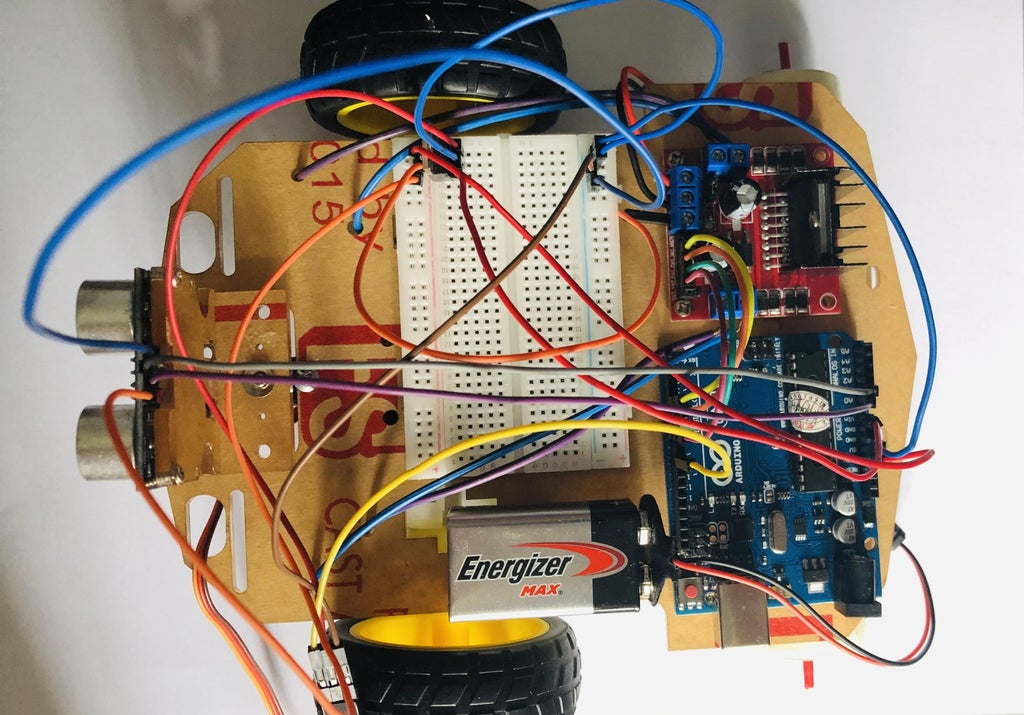
第 4 步:组装机器人的零件
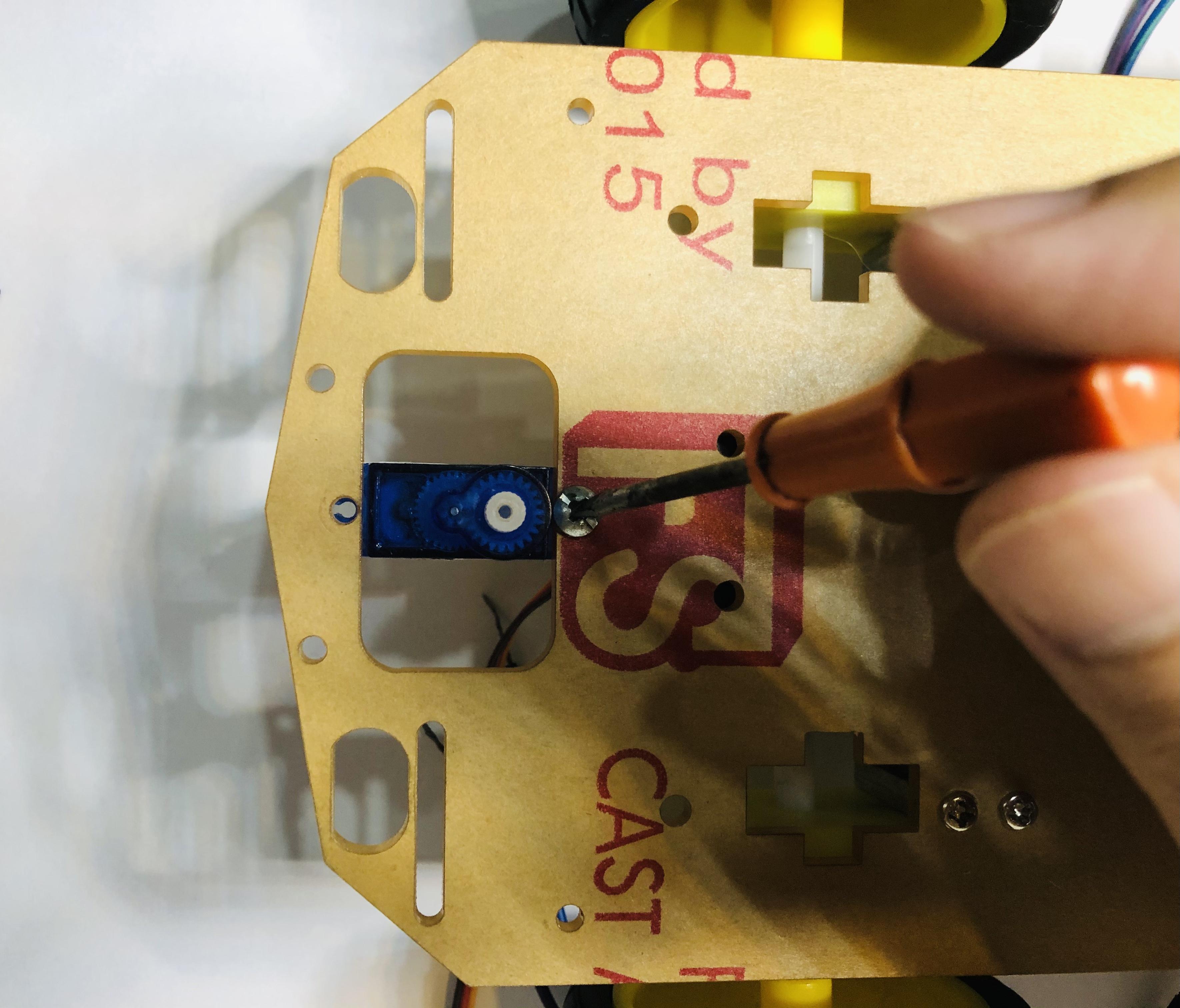
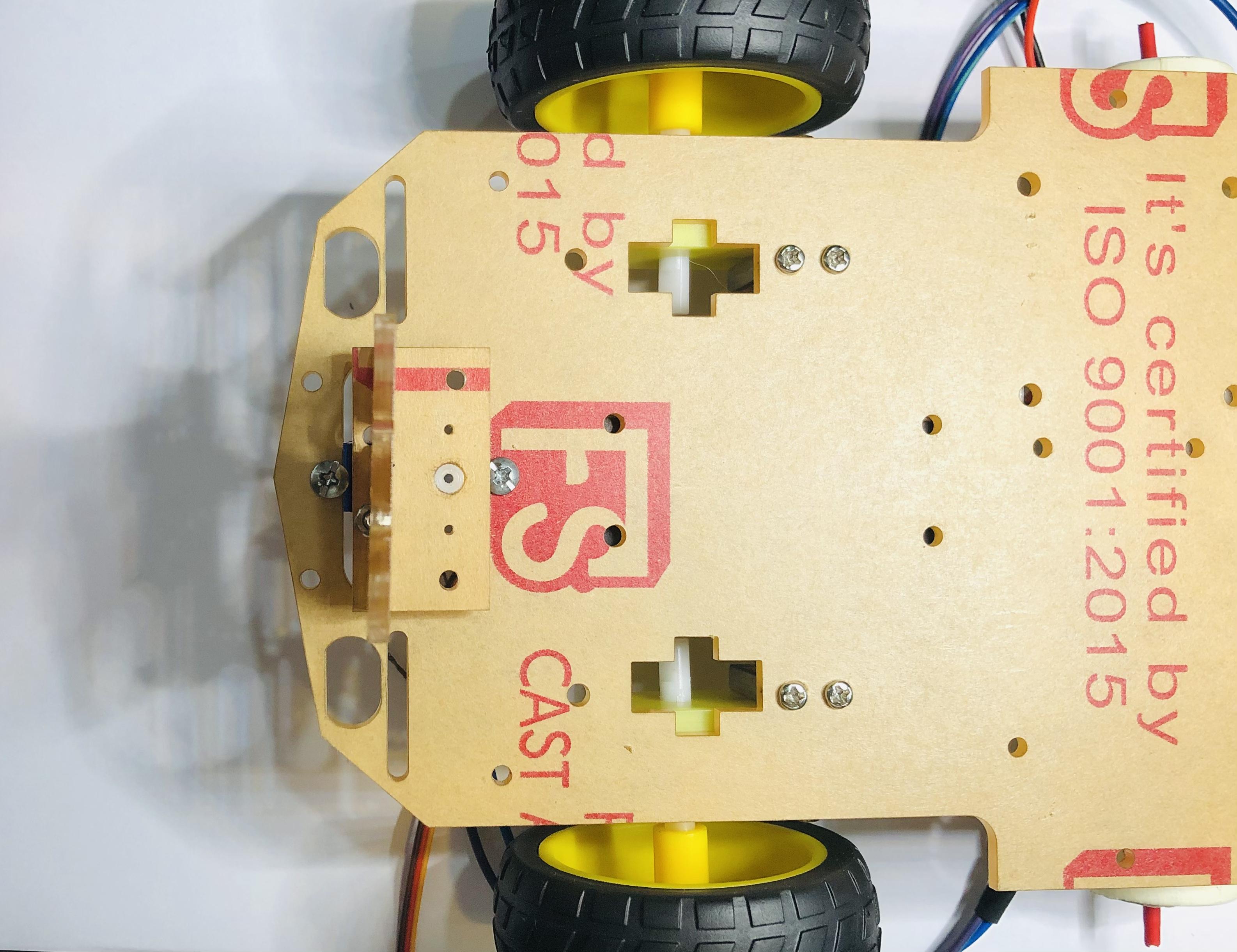


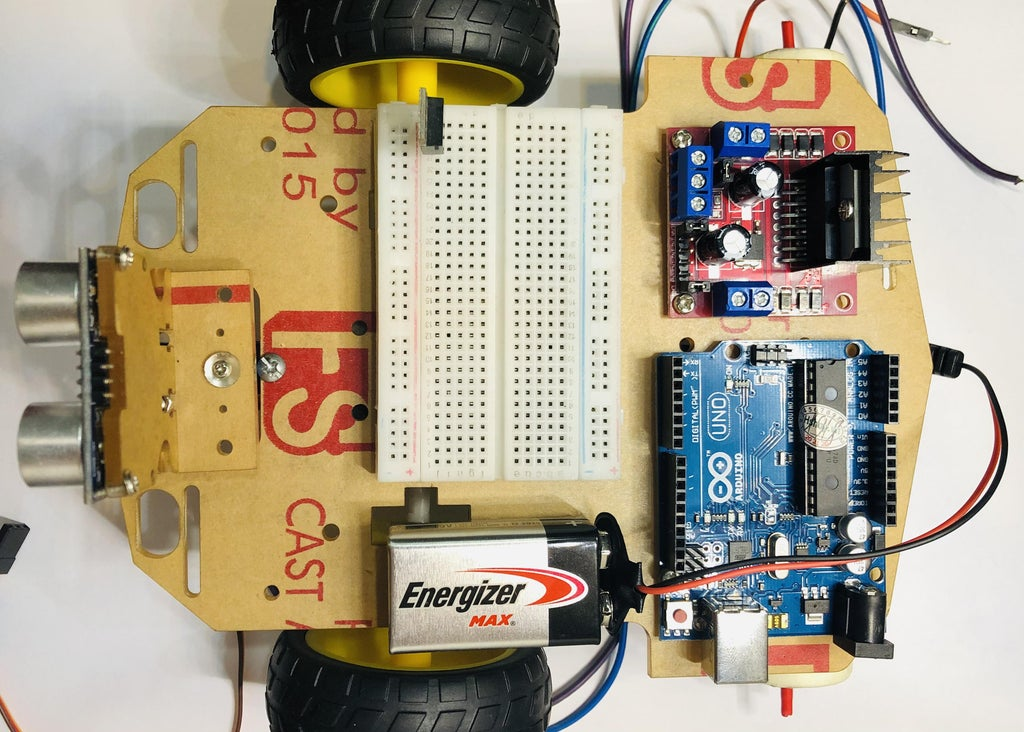
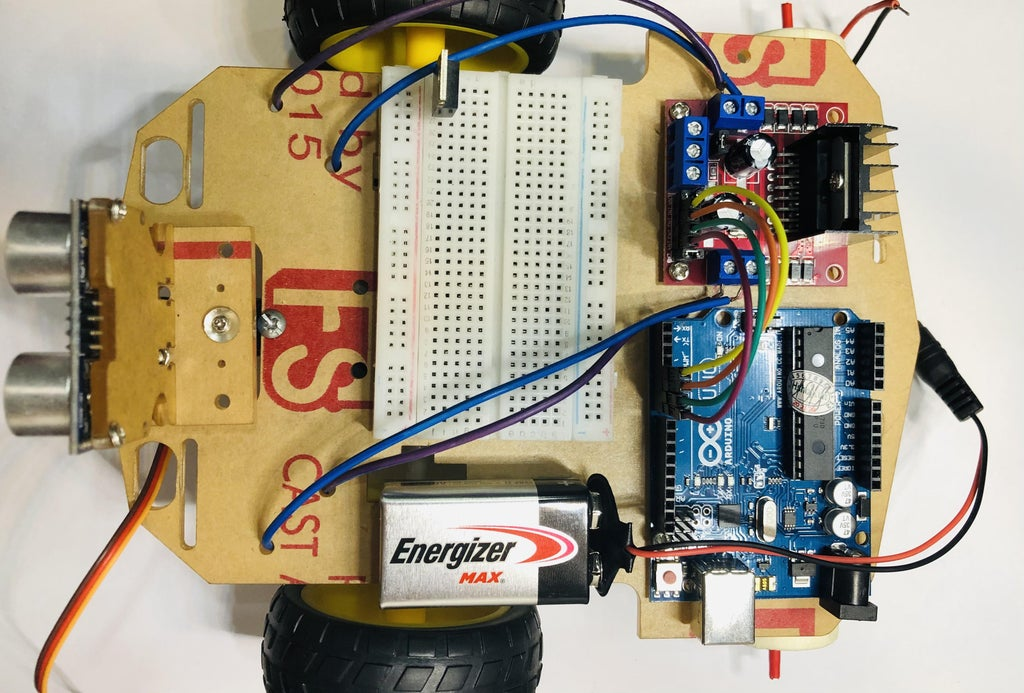
在连接所有组件之前,我们将固定底盘上的每个组件以形成机器人的形状。
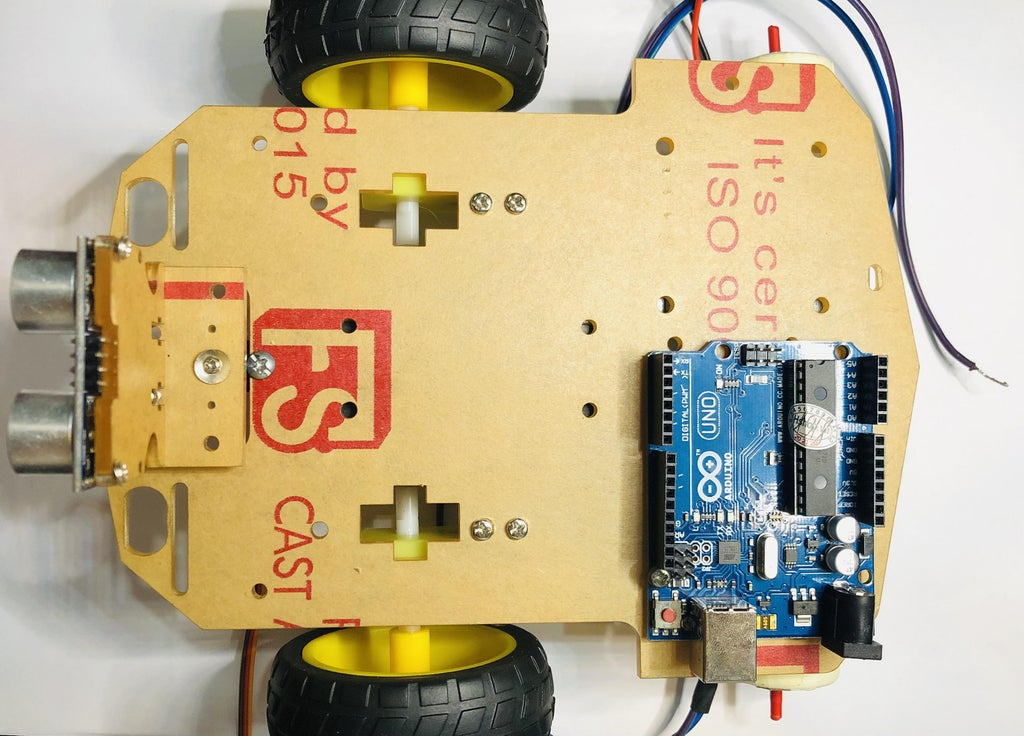
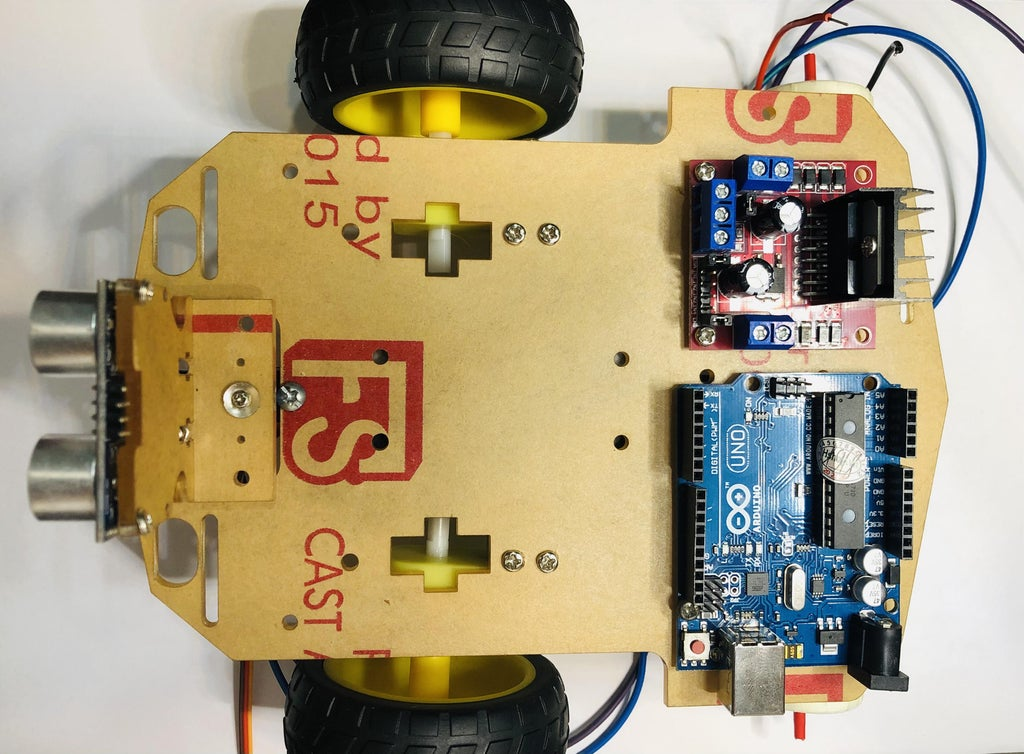
由于我在顶面使用了空间有限的单层底盘,因此已经放入了两个带轮子的电机,脚轮,电池座和伺服器固定在底面上。超声波传感器连接到传感器支架上,然后拧到伺服电机上。此外,Arduino Uno 板和电机驱动器模块放置在机器人的尾部,而面包板和 9 V 电池放置在机器人的中间。在这些组件中,电池座最后安装,以避免重叠在用于将组件连接到顶部的螺钉上。此外,请注意,在这个阶段,我们还没有对18650个细胞做任何事情。我建议我们把这些留在那里,直到你对如何照顾好它们有一些想法。
第 5 步:将所有内容连接起来

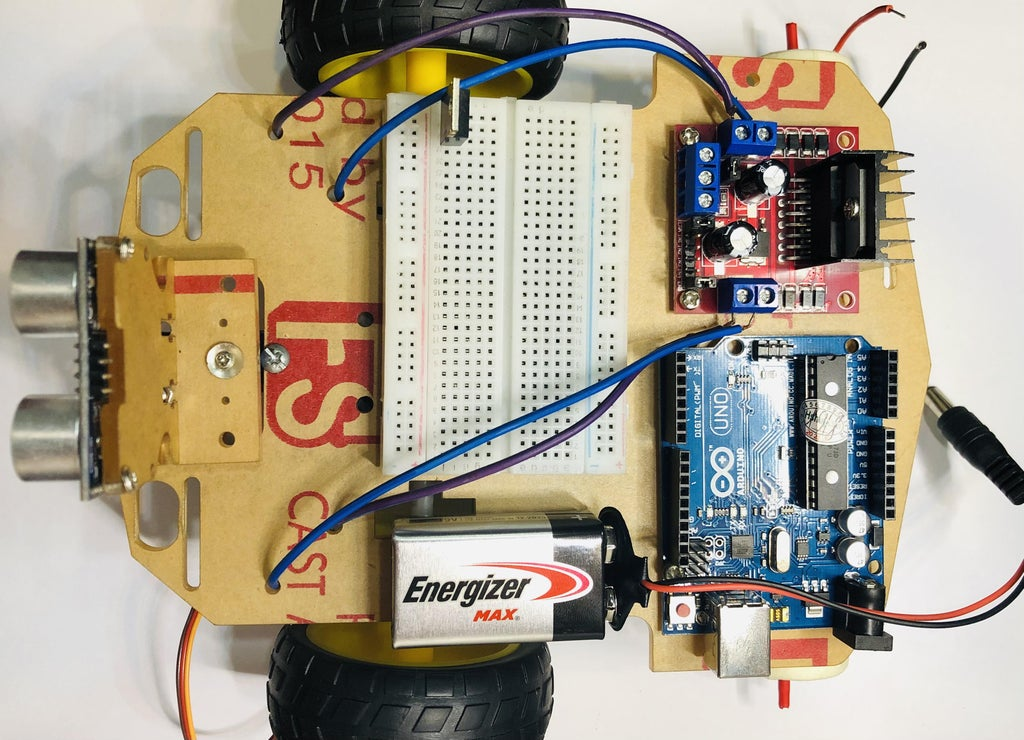
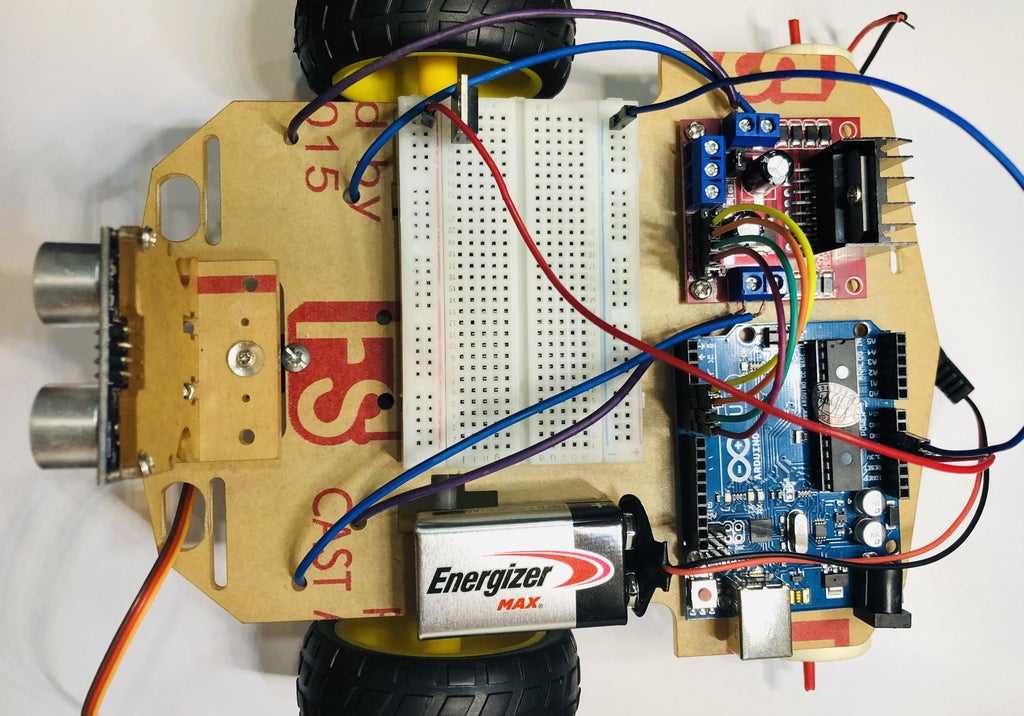
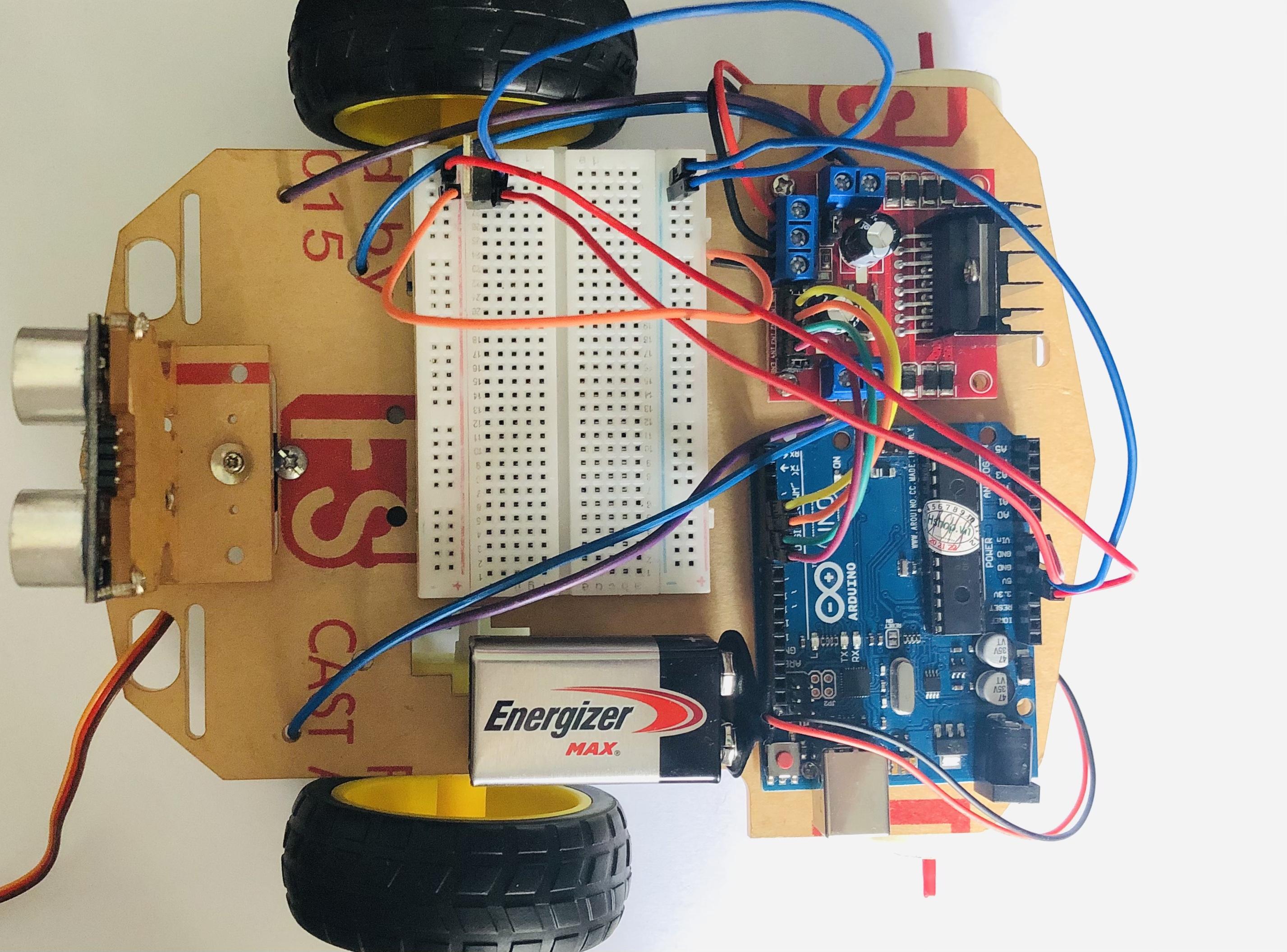
现在我们已经迈出了重要的一步。这些连接允许您的Arduino与机器人中的其他组件进行通信。照片说明中写的注释可能会对您有所帮助。
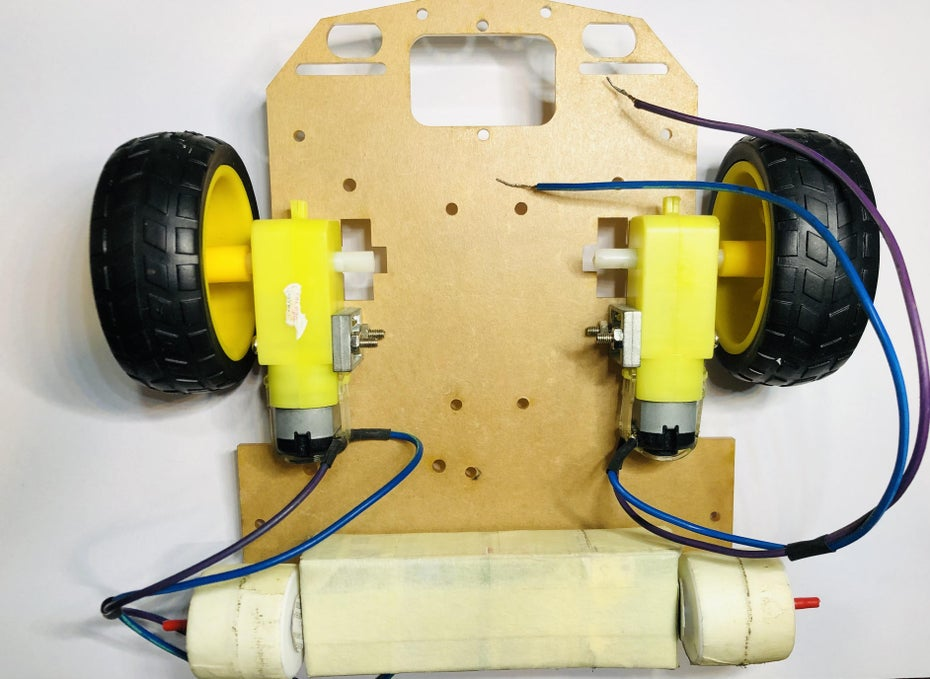
电机与电机驱动器的导线
如果看一下L298N电机驱动器原理图,可以看出有四个输出端子,包括OUT1、OUT2、OUT3和OUT4,分别以逆时针方向安装在模块上,用于为电机提供电流。
还记得本开头提到的电机端子 A 和 B 吗?现在是时候将电机 1(左电机)的 A 线连接到 OUT3,将 B 线连接到 OUT4,将电机 2 的 A 线(右电机)连接到 OUT1,最后将 B 线连接到 OUT2。
就我而言,紫色是左侧电机的 A 线的颜色,而蓝色是同一电机的 B 线的颜色,反之亦然(蓝色表示 A,紫色表示 B)。
将 Arduino 5 V 和 GND 引脚连接到试验板
这些引脚用于在面包板上创建两条5V和GND的公共共享线路,为机器人内的不同组件供电。
为您的电机驱动器供电
再次查看 L298N 电机驱动器原理图。您可以看到有三个端子用于为电机驱动器供电,包括 VCC、GND 和 5V。电池座的正极和负极线分别连接到VCC和GND为两个电机供电,而5V端子则连接到试验板上的公共5V线路,为模块的逻辑电路供电。
将电机驱动器连接到 Arduino 板
同样从上面的L298N原理图中,我们可以看到有六个输入引脚,从左到右分别是ENA,IN1,IN2,IN3,IN4和ENB。由于很可能有跳线代替ENA和ENB,我们只需要将IN1-IN4相应地连接到数字引脚4-7(又名引脚D4-D7)。这些销用于控制电机向前或向后旋转的方向。具体来说,IN4 向前驱动左侧电机,IN3 反转该电机,IN2 设置右侧电机的前进方向,IN1 反转。
ENA和ENB上预装的跳线基本上会将电机设置为最大速度。如果您想使用“analogWrite()”功能控制电机的速度,只需移除预安装的跳线,然后将 ENA 和 ENB 连接到 Arduino 上可用的 PWM 引脚,并将任何值写入这些引脚的范围从 0 到 255。
使用稳压器为伺服提供恒定功率
稳压器有三个引脚,包括输入、接地和输出。在这种情况下,它将从Arduino的Vin引脚获取9 V输入电压,并向伺服输出5 V的恒定功率。稳压器和伺服器都将沉入面包板上的公共接地线。
舵机还有三个引脚,分别是VCC,GND和信号引脚。如您所知,VCC 将连接到稳压器的“输出”引脚,而信号引脚连接到 Arduino 板上的引脚 D9。请注意,如果向 7805 输入 5 V,则伺服器将不起作用!因此,如果您使用 USB 电缆为 Arduino 供电,请将伺服器的 VCC 引脚连接到常见的 5 V 线路。
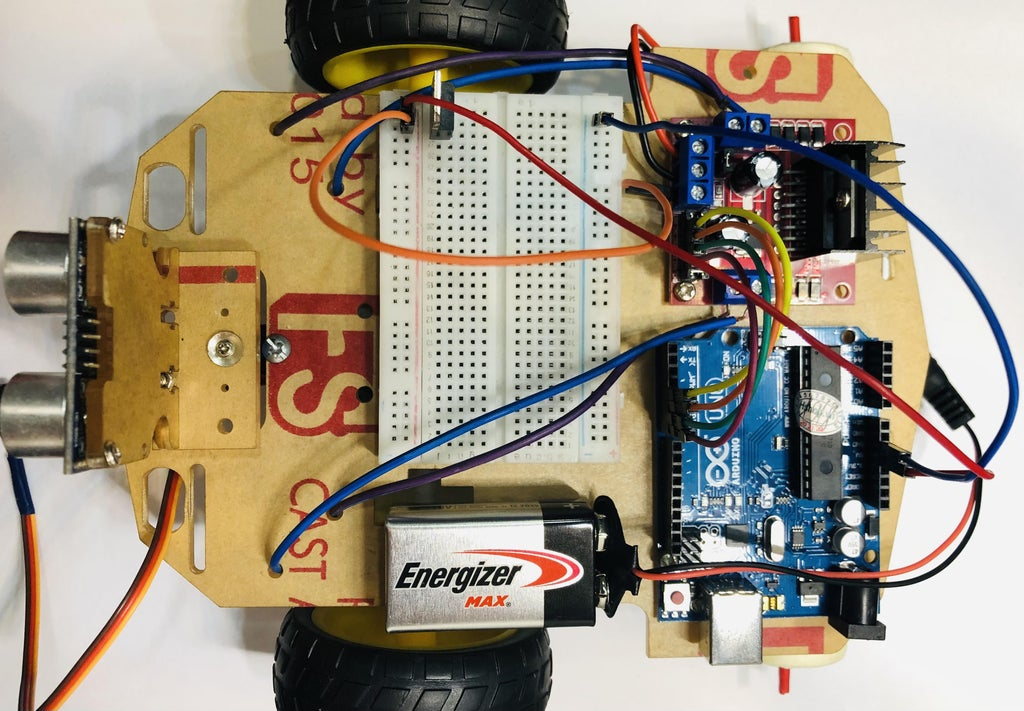
将超声波传感器连接到 Arduino Uno
超声波传感器有四个引脚,分别是VCC,触发,回声和GND。通常的做法是为每个引脚选择不同的电线颜色。我为VCC选择了橙色,为触发器选择了紫色,为回声选择了灰色,为GND选择了蓝色。该模块由公共 5 V 线路供电,并与其他组件吸收到同一接地线路。触发引脚连接到Arduino的引脚A0,而Echo引脚连接到引脚A1。
使用 DC 插孔使用 9 V 电池为 Arduino 供电
只需将插孔插入 Arduino 的外部直流端口,然后将 18650 电池放入电池座中,同时打开开关即可为系统供电。但是坚持住!你的机器人的大脑目前是空的,你需要在其中输入一些代码。
第 6 步:将代码上传到机器人的大脑
- 下载 Arduino IDE 软件
- 下载下面提供的代码
- 下载“新平”库
-
在 Arduino IDE 软件的“菜单”选项卡上,单击“工具”/“管理库…”
-
在搜索栏中输入“NewPing”,然后选择“安装”
-
将代码上传到您的 Arduino 板
-
通过 USB 电缆将 Arduino 板连接到您的 PC
-
在“菜单”选项卡上,单击“工具”,然后为“板”选项选择“Arduino Uno”
-
单击“验证”符号(看起来像“勾号”)以编译代码
-
单击“√”符号旁边的“上传”符号,将一些逻辑上传到机器人的大脑
附件
Arduino_FlinchingBot.ino
#include <NewPing.h> #include <Servo.h> #define TRIG_PIN A0 #define ECHO_PIN A1 #define MAX_DISTANCE 400 NewPing sonar(TRIG_PIN, ECHO_PIN, MAX_DISTANCE); Servo myservo; int distance = 100; int pos = 0; void setup() { //set up motors pinMode(7, OUTPUT); //left motors forward pinMode(6, OUTPUT); //left motors reverse pinMode(5, OUTPUT); //right motors forward pinMode(4, OUTPUT); //right motors reverse // set up servo myservo.attach(9); myservo.write(90); delay(2000); distance = readPing(); delay(60); } void loop() { int distanceR = 0; int distanceL = 0; if (distance <= 50) { moveStop(); delay(100); moveBackward(); delay(300); moveStop(); delay(100); distanceR = lookRight(); delay(50); distanceL = lookLeft(); delay(50); if (distanceR >= distanceL) { if (distanceR <= 30 && distanceL <= 30) { // if both sides are too narrow for (int i = 0; i < 2; i++) { // turn around turnRight(); moveStop(); delay(100); } } else { turnRight(); moveStop(); delay(100); } } else if (distanceR < distanceL) { if (distanceR < 30 && distanceL <= 30) { // if both sides are too narrow for (int i = 0; i < 2; i++) { // turn around turnLeft(); moveStop(); delay(100); } } else { turnLeft(); moveStop(); delay(100); } } } else moveForward(); distance = readPing(); delay(60); } int lookLeft() { for (pos = 90; pos <= 180; pos += 1) { // goes from 90 degrees to 180 degrees // in steps of 1 degree myservo.write(pos); // tell servo to go to position in variable 'pos' delay(5); } int distance = readPing(); delay(60); for (pos = 180; pos >= 90; pos -= 1) { // goes from 180 degrees to 90 degrees // in steps of 1 degree myservo.write(pos); // tell servo to go to position in variable 'pos' delay(5); } return distance; // return distance on the left side } int lookRight() { for (pos = 90; pos >= 0; pos -= 1) { // goes from 90 degrees to 0 degree // in steps of 1 degree myservo.write(pos); // tell servo to go to position in variable 'pos' delay(5); } int distance = readPing(); delay(60); for (pos = 0; pos <= 90; pos += 1) { // goes from 0 degree to 90 degrees // in steps of 1 degree myservo.write(pos); // tell servo to go to position in variable 'pos' delay(5); } return distance; // return distance on the right side } int readPing() { int cm = sonar.ping_cm(); if (cm == 0) // if the measured distance exceeds the measuring limit of the ultrasonic sensor, by default the sonar.ping_cm() function will return a value of 0 { // Due to the distance of 0 the robot will keep avoiding even when there is nothing in front of it cm = MAX_DISTANCE; // To fix this, we set the distance to the pre-defined MAX_DISTANCE of 400 cm } return cm; } void moveStop() { digitalWrite(7, LOW); digitalWrite(6, LOW); digitalWrite(5, LOW); digitalWrite(4, LOW); } void moveForward() { digitalWrite(7, HIGH); digitalWrite(5, HIGH); } void moveBackward() { digitalWrite(6, HIGH); digitalWrite(4, HIGH); } void turnRight() { digitalWrite(7, HIGH); digitalWrite(4, HIGH); delay(250); digitalWrite(7, HIGH); digitalWrite(5, HIGH); } void turnLeft() { digitalWrite(5, HIGH); digitalWrite(6, HIGH); delay(250); digitalWrite(7, HIGH); digitalWrite(5, HIGH); }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
第 7 步:照顾好 18650 电池

在将 18650 电池放入电池座为电机供电之前,请务必事先检查其剩余电压,以免意外缩短电池寿命。
那我的意思是什么?如果您想要长期使用的“健康”电池,请尽量不要过度使用或过度充电。例如,始终保持3.2 V至3.9 V的电压值(尽管大多数电池可以充电至最大值4.2 V)。为此,您必须经常检查用于为机器人供电的电池的剩余电压,并在电压降至 3.2 V 以下后对其进行充电。对于我正在使用的电池,通常需要大约两个小时才能将电池部分充电至大约 3.9 V。部分充电时间可能会因不同类型的 18650 电池而异,因此请注意时间!
如图所示,我的一个 18650 电池的剩余电压测量为 3.75 V,所以很好!现在我可以安全地使用它为我的机器人供电。
您可以在此处阅读有关如何延长电池寿命的更多信息。
第 8 步:根据需要修改代码!
我们快到了!现在我只想提供更多信息,以便您可以自由地个性化机器人的逻辑。
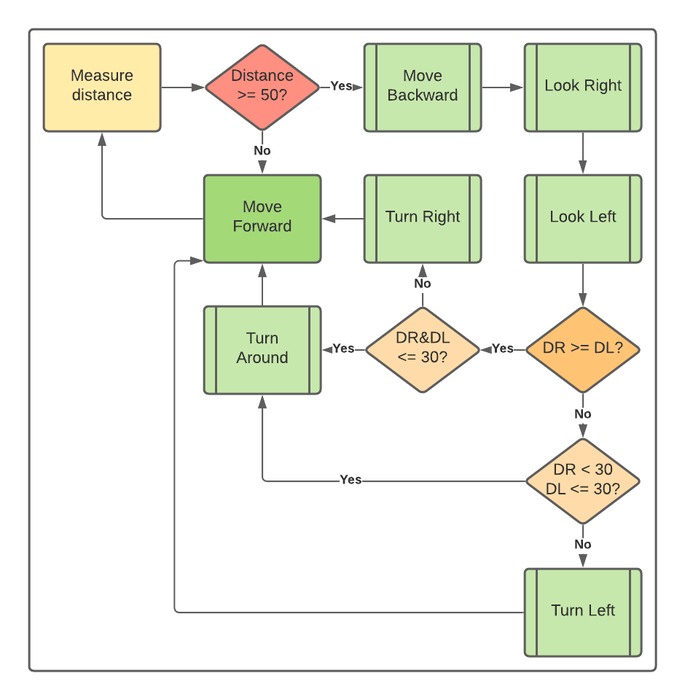
那么机器人是怎么想的呢?如果你看上面的流程图,可以看出机器人会不断检查50厘米的距离内是否有物体在它面前。如果什么都没有,它将继续前进。否则,它将后退以避免与前面的物体发生碰撞,然后它会转头看右侧和左侧,以决定它应该转向哪个方向(左或右)。例如,如果当时右侧有东西挡住,它会向左转,反之亦然。但是,如果两侧都太窄(即两侧的距离都短于30厘米),它只会简单地掉头。转向任何方向后,它将继续直行,关闭动作循环。
第 9 步:完成!

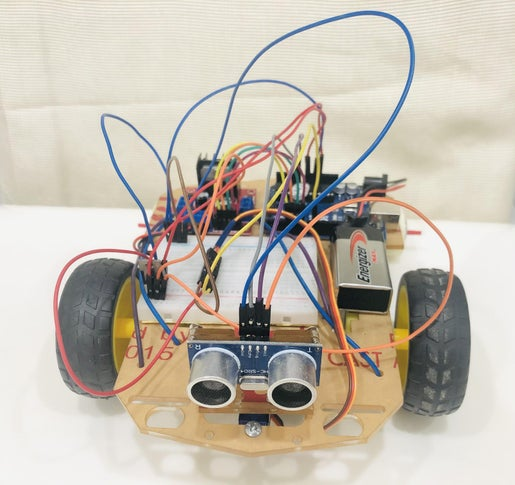
恭喜你来到这里!让我们将 18650 电池放入电池座中,打开开关,然后将 9 V 电池直流插孔插入 Arduino 的外部直流端口,然后看着您的机器人开始滚动车轮!


![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-WxcPt8RT-1678264694735)(null)]](https://content.instructables.com/F42/J3WA/KGHZALL4/F42J3WAKGHZALL4.jpg?auto=webp&frame=1&width=1024&height=1024&fit=bounds&md=8ccbcfd62cfa17e14243fa154f9a659d){kind=link}
{kind=link}