
- 1如何备考PMP考试?
- 2[Go语言]我的性能我做主(1)_b.reportallocs()
- 3安装运行streamlit 过程中出现的2个问题_no module named 'streamlit
- 4【JavaWeb】网上蛋糕商城-项目搭建_网上蛋糕商城web项目
- 528岁程序猿,劝告那些想去学车载测试的人
- 6华为OD机试-字符串变换最小字符串(Java&Python&Js)100%通过率_给定一个字符串 最多只能交换一次 返回变换后能得到的最小字符串
- 7强力推荐!史上最强logo设计Midjourney提示词合集_midjourney logo设计关键词
- 8pythonexcel汇总_Python汇总excel到总表格
- 9如何使用Python读写多个sheet文件_python sheets 选择读取多行sheet
- 10喜报丨上海容大中标某股份制大行信用卡中心PDA移动办卡终端项目
2023年电赛E题-运动目标控制与自动追踪系统(OpenCv)_2023年电子设计大赛运动与追踪激光系统
赞
踩
目录
比赛经历以及思路
在导师分配完参赛成员后,我被分到了和大三的学长学姐一队。我主要是负责软件部分,学长主要负责硬件部分,学姐则是负责论文的撰写。虽然我们队伍的分工已经很明确了,但是到硬件部分,该帮忙的地方还是要一起完成,这才是一个团队该有的样子。

 第一天题目刚发下来,我们就懵了。本来是想做小车的题目,没想到陆空合体了,所以只能换题目做,之前我把2022年省赛的声源定位做过一遍,今年本来想选F题声传播的定位系统,但是好像这个E题更简单些,所以果断选择E题(专挑软柿子捏),我的队友也表示认同。
第一天题目刚发下来,我们就懵了。本来是想做小车的题目,没想到陆空合体了,所以只能换题目做,之前我把2022年省赛的声源定位做过一遍,今年本来想选F题声传播的定位系统,但是好像这个E题更简单些,所以果断选择E题(专挑软柿子捏),我的队友也表示认同。
第一天上午确认完题目后,我们就猜到今年肯定超级多人选择E题,我们用的是树莓派,毕竟要实现起来相对比较简单,所以要比拼的一定是精度!第一天上午到下午这段时间我一直在调舵机,但是我们的舵机性能比较差,运动起来不是那么的平稳,毕竟是老舵机了。网上新买的装备也一时没有到货,我们决定还是要用步进电机来做。一开始不确定能不能用步进电机,但是组委会是说不让用打字机那样的步进电机,也就是步进电机不能控制平移,我们是用步进电机模拟二维舵机云台,只是用于旋转是可以的。
第一天下午,我是想把激光笔回归中心点的坐标给写死,但是感觉换个环境后回归中心点时的误差会比较大。经过仔细读题后,我们是可以用铅笔画一个黑框(width<1mm)出来的。到晚上我就准备用OpenCv去识别那个黑框,然后把中心点拟合出来。
第一天晚上,我以为识别铅笔黑框不会太难,但是我开始写代码的时候发现,这个铅笔框也太细了吧,根本识别不出来,一个小小的阴影可能都比黑色边框更明显!经过我一番猛调阈值后,那个轮廓终于有了一丁点样子。但是边框不是连续的,一个边可能就几个像素点经过筛选后被保留下来。不过对于我这种机器视觉大师来说,识别这种小黑框根本不在话下(bushi)。
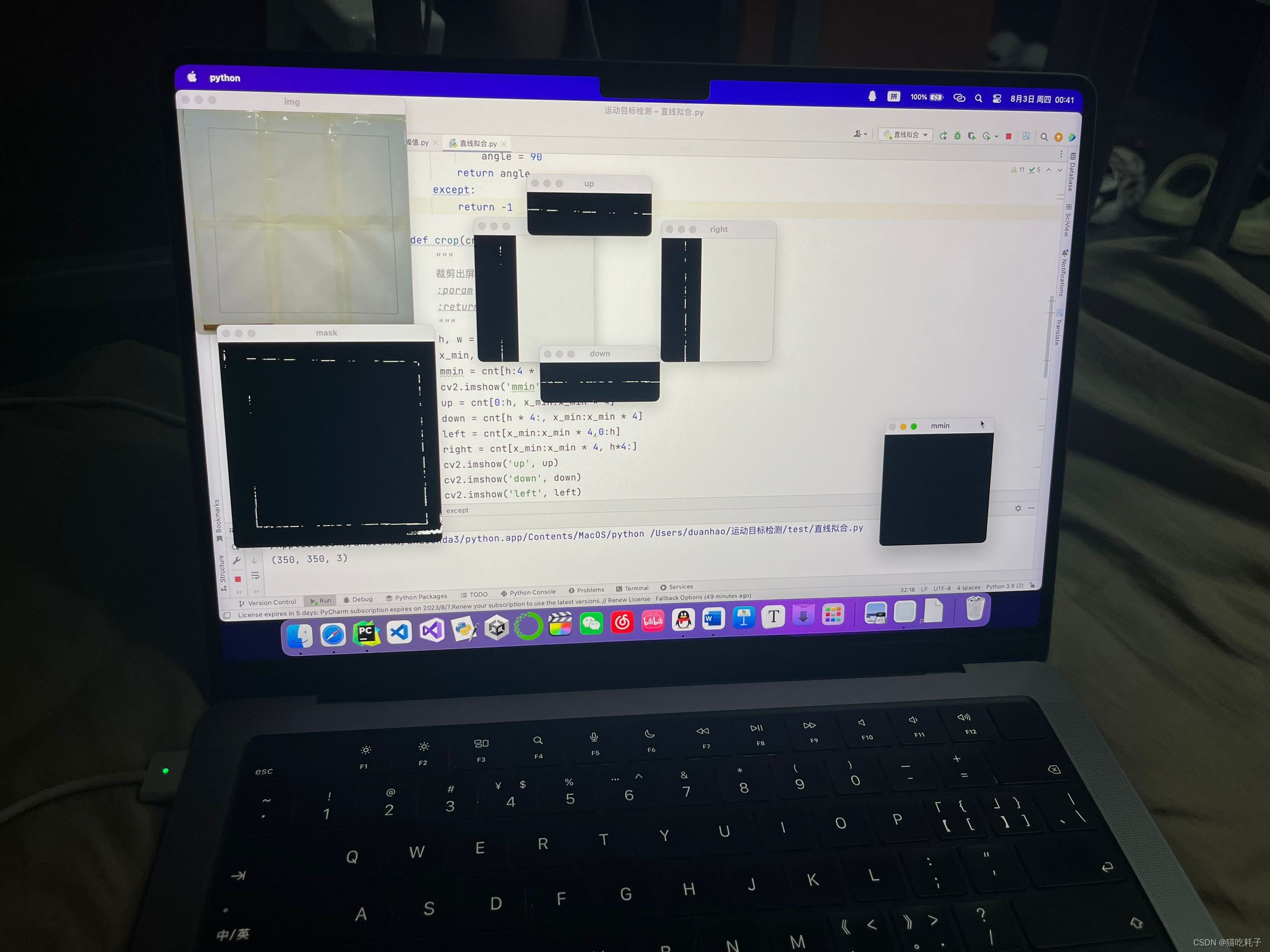
小学我们就学过,两点确定一条直线,虽然一条边上的黑色像素点不连续,但是我可以根据这些像素点fitLine拟合出一条直线来。四条边拟合出四条直线,然后直线两两相交就可以把四个边长的交点坐标算出来,那么中心点的坐标不就手到擒来
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

