
- 1[转]大数据环境搭建步骤详解(Hadoop,Hive,Zookeeper,Kafka,Flume,Hbase,Spark等安装与配置)_大数据集群搭建,hadoop,hive,hbase
- 22024年最新如何安装Pycharm最新版本-详细教程_pycharmeve和arm64,2024年最新C C++开发最佳实践手册全网独一份_pycharm2024安装教程
- 35.gradle配置和project_gradle implementation project
- 4【秋招总结】双非本小菜鸡的坎坷秋招之路(附面经)_古茗offer 3天
- 5Allure精通指南(02)Mac和Windows系统环境配置_allure配置环境变量
- 6如何把自己的数据分享给chatgpt让它处理你的数据_分享用gpt写的
- 7资讯|WebRTC M90 更新_webrtc m100
- 8物体检测框架 RetinaNet 深度神经网络简介
- 9江大白 | 基于Pytorch框架,从零实现Transformer模型实战(建议收藏!)_transformer实战
- 10SQL注入之WAF绕过技巧_sql绕过waf的方法
智能手术机器人技术与原理(二)
赞
踩
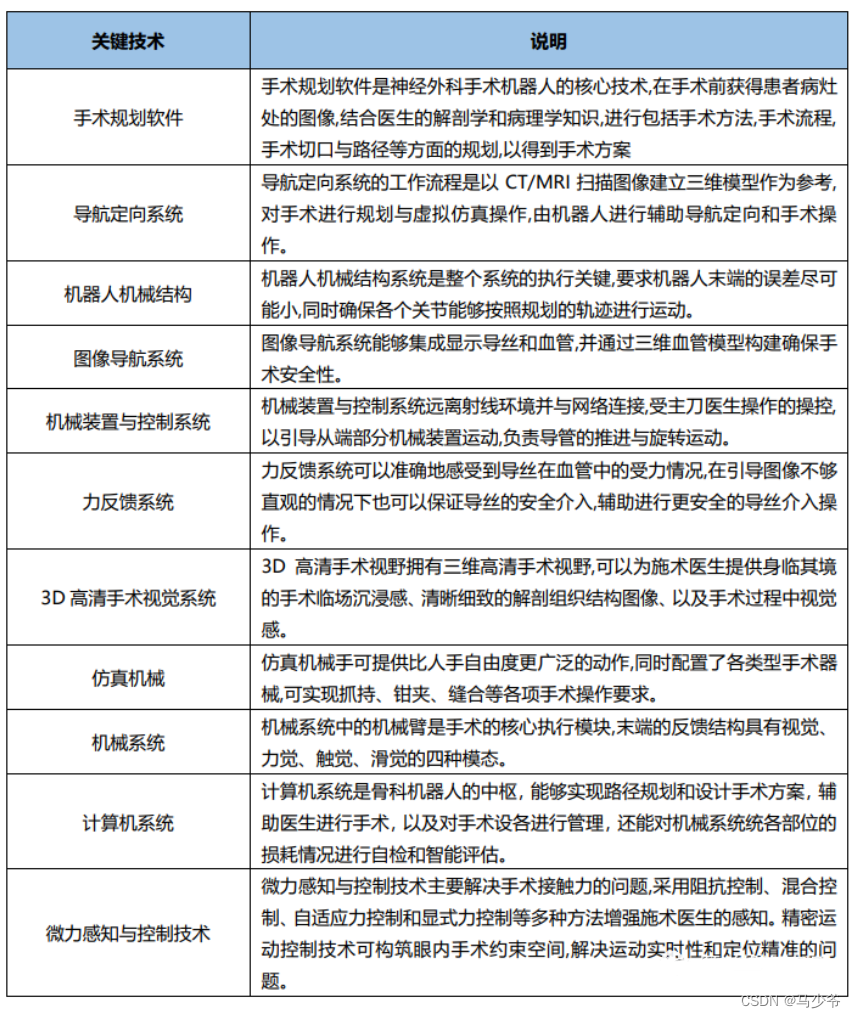
手术机器人产品需要多种类跨专业的技术融合,将手术机器人的关键技术详细划分,可以分为手术规划软件、导航定向系统、机器人机械结构系统、图像导航系统、机械装置与控制系统、力反馈系统、3D高清手术视觉系统、仿真机械手、机械系统、影像系统、计算机系统、微力感知与控制技术、眼球组织的生物力学建模技术、精密运动控制技术。
一、软件:手术导航系统的构成及核心技术
手术导航系统通常需完成四项主要工作:
**第一,三维模型重建。**术前使用MRI、CT等医学影像数据进行三维模型重建,得到患者病灶的解剖结构数字模型,方便医生判断病灶位置和熟悉周边组织结构。三维模型也被用于后续的手术规划和术中引导,是手术导航系统的重要数据基础。
**第二,手术规划与模拟。**通过三维模型,判断病灶位置及其周边组织特征,建立手术路径并制定手术方案,用于术中引导医生或机器人操作。另外,医生也可使用计算机进行模拟手术,减小失误率。
**第三,术中校准与引导。**术中病人、器官、组织均会发生变形和移动,需及时校准三维模型和手术路径,以保证手术的准确性。同时,需为医生提供术区三维模型和手术路径图像,以保障视野、减少探查和引导操作。
**第四,空间定位。**通过医学影像、电磁和光学技术可测量术区组织和手术器械的空间位置和姿态,从而在手术导航系统中准确显示相对位置,可辅助医生沿规划路径操作,也可对机器人进行伺服闭环控制。
手术导航系统通常包括三个核心模块,包括医学影像模块、追踪定位模块和图像显示模块。
(1)医学影像模块
理想的医学影像模块可以实时检测病灶和手术器械、不对患者和医生的健康造成危害且不阻碍医生开展手术操作,现阶段尚没有一种常用医学检测手段可以满足全部上述要求。目前手术导航系统主要采用的医学影像源于CT、MRI、PET、超声、可见光、荧光等。
(2)追踪定位模块
理想的手术导航系统不需要搭配追踪定位模块,其追踪定位功能完全可以通过医学影像模块得以实现。但受限于现阶段医学影像设备的检测原理和性能,目前仍需要引入一套追踪定位模块,主要包括标志物/传感器和定位仪两部分,以实现实时跟踪定位手术器械与病灶间相对位置的功能。其中,标志物/传感器预先固定在病人、手术工具上,可以被定位仪追踪;定位仪实时接收传感器/标志物的信号,基于软件算法处理加工信息,并将相关信息传输给图像显示模块。
(3)图像显示模块
图像显示模块主要实现空间配准和图像融合两个功能。空间配准是通过软件算法将术前成像、术中成像、手术器械、病灶与追踪定位系统统一在一个空间坐标系;图像融合则是将已配准的医学影像与追踪定位模块的位置信息予以综合显示。
图像显示模块在研发环节中,需考虑不同的适应症的解剖学和影像学特征,采用合适的显示技术(e.g. 高清图像、三维立体图像、增强现实技术)以实现更直观清晰的显示效果。
以上三个模块从不同方面影响手术导航系统的精度。医学影像模块的精度主要取决于医学影像设备的检测能力,追踪定位技术的精度主要取决于追踪定位技术,而图像显示模块的精度主要取决于空间配准技术和图像融合技术。
(1)图像融合技术
不同的医学影像设备可以提供不同信息不同形式的图像,常用的医学影像包括CT、MRI、PET、超声、可见光、荧光等。图像融合技术可以提高图像质量,或者弥补单一模态图像由于成像机制限制导致的缺点,同时通过凸显感兴趣的组织结构、忽略次要组织结构,为医生呈现更清晰的手术区域。
图像融合技术通常包括图像滤波、图像插值、图像分割、融合重构(二维图像、三维模型)几个步骤。其中图像滤波主要减少图像的噪声、提高信噪比、消除图像伪迹;图像插值是对关键数据进行各向同性处理;图像分割则对不同的组织器官影像进行分割和分类,其中提取出感兴趣的组织结构、忽略次要组织结构;融合重构则对不同模态的图像进行配准和融合,以二维形式或三维重构形式予以最终呈现。
(2)空间配准技术
空间配准技术对手术导航至关重要,配准过程是整个手术导航系统中至关重要的部分,只有完成了实际病人空间和虚拟三维模型之间的精确配准,随后的器械跟踪才有意义,才能保证实际的手术器械能够精确到达设定的病灶部位。配准意义在于将实际的手术空间与虚拟的三维模型之间构建空间映射关系。空间映射关系可以包括刚性(Rigid)、仿射(Affine)、单应性(Homography)、复杂的大变形模型(Complex LargeDeformation Model)等。
空间配准技术的算法可以基于灰度(Gray Scale)也可以基于特征(Feature)。在手术导航系统中,主要采用特征配准,例如主要依赖解剖标志点、表面轮廓、术前植入基准标记物等。
空间配准技术分为术中配准、自动配准两大类。术中配准依赖于解剖标志点,表面轮廓或术前植入基准标记物,采用基于特征点配准或表面配准的方法。
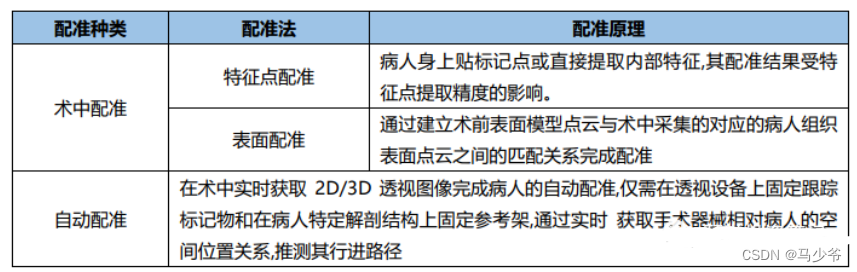
术前数据与术中数据的配准是图像引导外科中的关键技术,它将术前数据(病人术前影像或由这些影像获取的解剖结构模型和手术规划)和术中数据(病人图像,手术器械位置,跟踪系统等)统一到同一坐标系下。
受限于硬件运算能力,空间配准技术算法追求配准概率高则配准速度慢、追求配准速度快则配准概率低,在面对不同的适应症和微创手术特征,往往需要在配准概率和配准速度间做好权衡。
(3)追踪定位技术
追踪定位技术(有时也称立体定位技术)是利用空间位置传感器来实时检测区域(也即手术区域)范围内手术器械以及病灶的空间位置,并依赖算法将两者的空间位置归入同一个三维坐标系中。
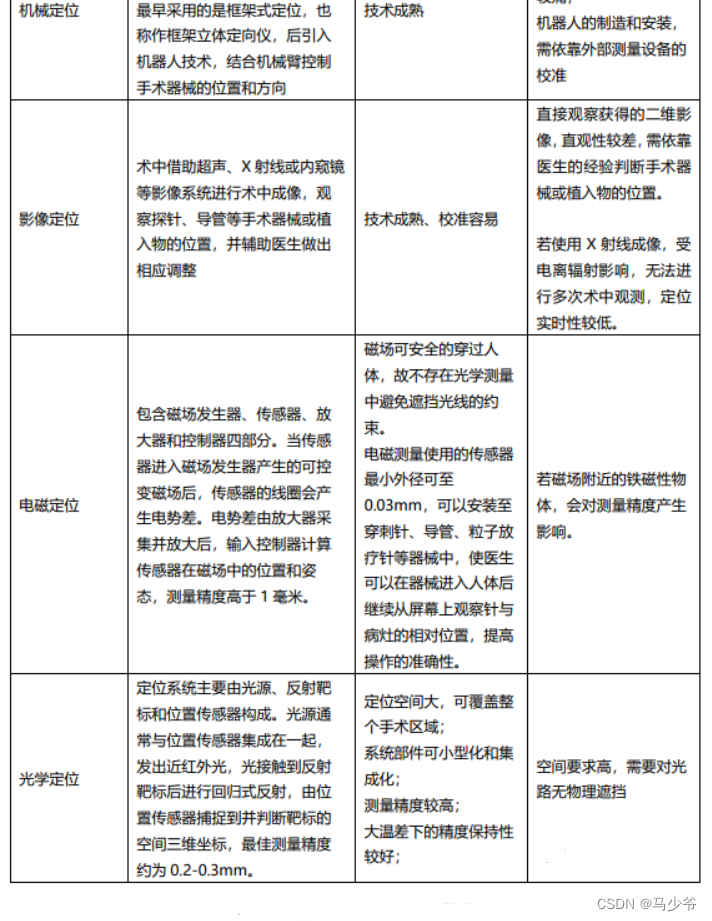
与手术导航系统匹配的手术器械(常用的包括探针、探头、刚性内窥镜导管等)在生产过程中便将空间位置传感器集成其中,而患者病灶上的传感器一般于术前进行安装(以骨科为例,通常传感器与一根或几根骨头刚性连接)。根据测量方法,空间定位系统主要可分为机械、影像、电磁和光学定位四类。
二、硬件:从操作手臂、远心机构与手术器械
(1)从操作手臂
一般从操作手端需要具备夹持手术器械和内窥镜, 并且将它们的摆动支点定位在手术切口的功能。微创外科手术从操作手臂构型主要分为分体式、一体式,分体式从操作手臂基座位置相互独立,一体式从操作手臂都固连在一个基座上。
分体式从操作手臂术前摆位灵活,易于选择器械合适的插入位置和角度,但是占用手术室较大的空间,且难于确定从操作手臂间的相对位置关系,代表产品有ZEUS、华鹊-II、Senhance等。
一体式从操作手臂结构紧凑,占用空间小,机械臂间相对位置确定。但是机械臂间容易发生干涉,增加术前摆位的难度,代表产品为达芬奇手术机器人。
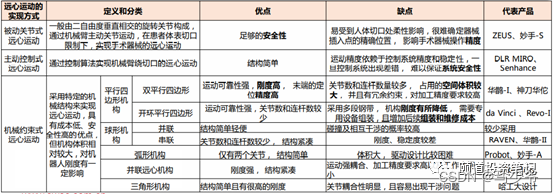
(2)远心机构
为防止在手术中对人体组织造成伤害,手术器械及腹腔镜在人体内只允许存在四个自由度的运动:分别绕体表小切口横滚和俯仰的两个摆动自由度,一个沿器械自身轴线的平移自由度和一个绕器械自身轴线的旋转自由度。根据临床手术经验,在四个自由度中,要求绕体表切口的摆动角度各为±80°,平移自由度的平移范围为 300mm,而旋转自由度的旋转角度则为 360°。由此可见,手术器械的可操作空间为锥度 160°,深度300mm 的球内锥空间。而为保证安全性使器械在工作空间的边缘不发生干涉,理论得出的工作空间要大于实际器械的可操作空间。
四个自由度的运动轴线相交于体表小切口处,使得器械围绕定点即体表切口而运动,把这种运动叫做远心运动,体表切口处定点称为远心点,实现这种远心运动的机构则称之为远心机构。机器人从操作手臂功能分部:分为位置调整机构和远心定位机构两部分。远心机构广泛应用于微创手术机器人中,远程运动中心机构的刚度、精度、稳定性和灵活度直接决定了微创手术机器人从手系统的性能,因此是从操作手设计的核心问题。
微创手术中实现约束远心点的形式有被动式关节、主动控制和机械约束式远心机构。
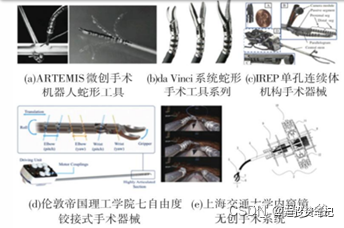
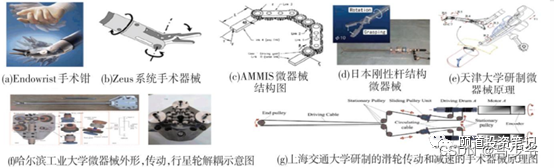
(3)手术器械
手术器械是微创手术机器人系统从手中直接作用于病患部位的部分,它代替传统微创手术中医生直接操作手术工具所具备的所有功能,在腹腔微创手术机器人的机械系统中尤为重要,一般要具有灵活度高、安装便捷、方便做无菌化处理等特点。常包含手术钳、手术剪刀、高频电刀、吻合器等工具,可分为多关节手术器械和连续体机构手术器械。多关节手术器械灵活度和精度较高,使用可靠。连续体机构手术器械能简化结构,减小直径,增加灵活度。然而其低刚度的缺点限制了其应用范围。
手术器械的性能主要取决于器械结构和传动系统,此外材料的人体兼容性也很重要。国产企业在微创手术机器人用手术器械的研究上起步较晚,在复杂小尺寸传动上距国外相关产品有一定差距,未来在传动结构紧凑化和运动控制精细化方面缩小与国外产品差距的同时,也有优化手术器械传动链和探索传动机构新原理。未来手术器械将朝着体积小巧、受力大、精度高、灵活性好、可靠性高方向发展。
参考文献:
智能手术机器人技术与原理

