
- 1研发效能DevOps: Git安装_gitee devops本地安装
- 2Doris 0.14.7 版本发布啦_doris update
- 3【Android】Gradle 切换 国内源_gradle源服务器换源
- 42021年春季学期期末统一考试品牌管理 试题_以下哪些属于cc品牌管理模式的发展原则
- 5搭建nacos集群 和 网关_nacos c#
- 6cartographer安装(过程超简单,成功安装经验)
- 7cmake应用:集成gtest进行单元测试_cmake 使用 gtest_gtest集成至make
- 8干货!java实现如何把PPT转PDF的两种方法,别再说你不会!(一)_java ppt转pdf
- 9基于 Python+Django 构建智能互动拍照系统_基于django的图片
- 10本地部署DbGate数据库管理工具并实现异地远程访问查询数据_dbgate教程
【无人驾驶系列】基于ROS的无人驾驶系统_无人驾驶技术系列文章将讨论ros系统
赞
踩
作者简介:
刘少山,PerceptIn联合创始人,主要专注于增强现实、虚拟现实、机器人的核心SLAM技术及其在智能硬件上的实现与优化。创立PerceptIn之前在百度美国研发中心工作,负责无人车系统架构及产品化。
张伟德,百度美国研发中心高级架构师。曾在弗吉尼亚大学网格计算小组担任研究员,在Yahoo!、微软等公司负责大型分布式搜索构架设计。目前在百度从事大数据、深度学习架构和开发。
James Peng,百度首席架构师。斯坦福大学博士,研究方向包括云计算平台、深度学习、数据建模、大规模数据库等。曾在Google工作多年,加入百度后领导多个创新项目,并于2013年获得百度最高奖。
责编:周建丁(zhoujd@csdn.net)
本文为《程序员》原创文章,未经允许不得转载,更多精彩文章请订阅2016年《程序员》
本文是无人驾驶技术系列的第二篇。在上篇解析光学雷达(LiDAR)技术之后,本文着重介绍基于机器人操作系统ROS的无人驾驶系统。文中将介绍ROS以及它在无人驾驶场景中的优缺点,并讨论如何在ROS的基础上提升无人驾驶系统的可靠性、通信性能和安全性。
无人驾驶:多种技术的集成
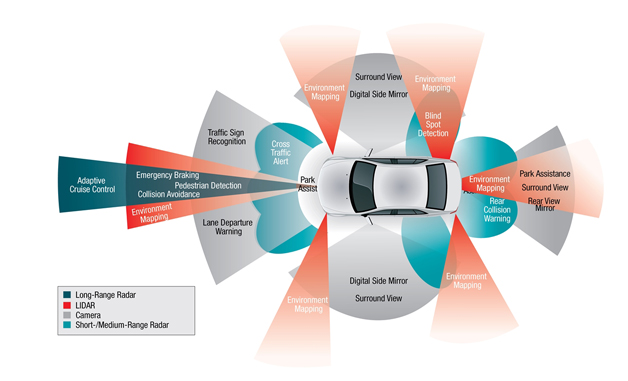
无人驾驶技术是多个技术的集成,如图1所示,一个无人驾驶系统包含了多个传感器,包括长距雷达、激光雷达、短距雷达、摄像头、超声波、GPS、陀螺仪等。每个传感器在运行时都不断产生数据,而且系统对每个传感器产生的数据都有很强的实时处理要求。比如摄像头需要达到60FPS的帧率,意味着留给每帧的处理时间只有16毫秒。但当数据量增大之后,分配系统资源便成了一个难题。例如,当大量的激光雷达点云数据进入系统,占满CPU资源,就很可能使得摄像头的数据无法及时处理,导致无人驾驶系统错过交通灯的识别,造成严重后果。
如图2所示,无人驾驶系统整合了多个软件模块(包括路径规划、避障、导航、交通信号监测等)和多个硬件模块(包括计算、控制、传感器模块等),如何有效调配软硬件资源也是一个挑战。具体包括三个问题:第一,当软硬件模块数据增加,运行期间难免有些模块会出现异常退出的问题,甚至导致系统崩溃,此时如何为提供系统自修复能力?第二,由于模块之间有很强的联系,如何管理模块间的有效通信(关键模块间的

