
热门标签
热门文章
- 1记:Git 提示Another git process seems to be running in this repository, .....
- 2xilinx rdma实现100G以太网开发笔记,支持标准ROCE V2协议,与PC大带宽通信,支持麦乐斯全系列网卡
- 3一文解决Spark 数据倾斜
- 4【数据结构与算法】时空复杂度的计算_时空复杂度怎么算
- 5gitee使用之Pull Request_gitee pull request
- 6nltk分词
- 7华为ARM架构离线安装rancher_arm架构麒麟系统安装rancher
- 8测试用例编写方法_测试用例生成方法
- 9大学生毕设神器 | 电影分析 电影爬虫 基于Python的电影可视化分析 基于大数据的电影可视化分析 基于K-means的电影满意度分析
- 10photoshop 导出 qml脚本问题(问题解决)_photoshop怎么转为qt的qml
当前位置: article > 正文
AGV机器人的调度开发分析(1)- 内核中的路线规划
作者:一键难忘520 | 2024-06-26 08:08:04
赞
踩
AGV机器人的调度开发分析(1)- 内核中的路线规划
准备开始写一个系列,介绍下AGV机器人的调度的开发和应用。
按照openTCS的核心内容,国内多家广泛应用于AGV的调度。那么架构图如下:
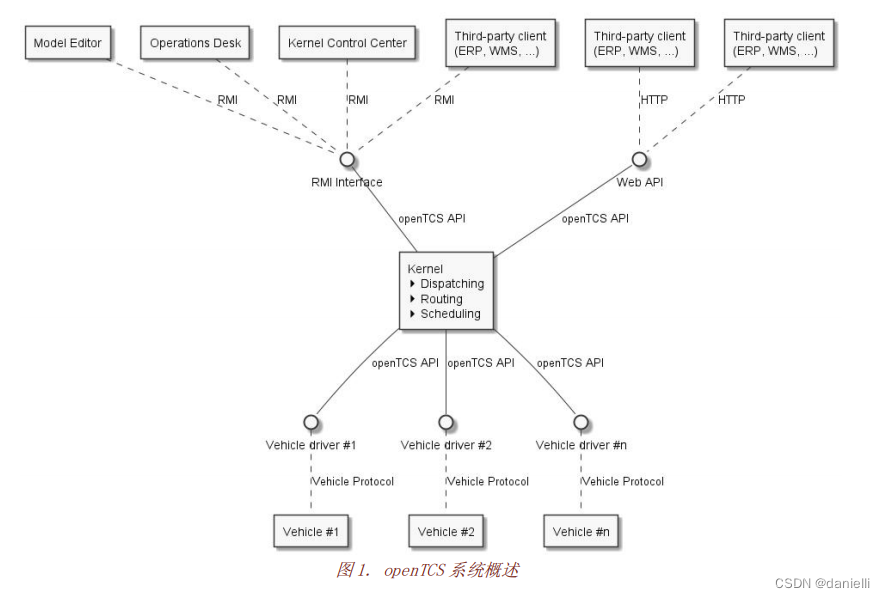
Kernel中有一个是Routing,这是路由规划模块,需要实现的细节功能包括如下:
1. List<LandmarkInfo> GetRoute(LandmarkInfo StartLand, LandmarkInfo EndLand)
根据地标,获取到最优的路径信息。(策略可以是最短路径,最小拐弯等)
算法可以使用A*等,或其他优化的算法。
2. List<LandmarkInfo> getNextLand(LandmarkInfo preLand)
部分有用的子方法,获取下一地标
3. void AccountDirect(ref List<LandmarkInfo> Routes)
计算转向和前进和后退
后面有空时详细展开各项。如需要详细讨论的,可发邮件给我 448283544@qq.com
另外,三个重要模块是调度、交通管制、通讯协议。下节介绍核心调度模块,其中需要的线程和任务管理,包括任务的派发,机器人的回原点充电等功能。 另外这个系统重要的还包括有地图模型编辑器、任务实时显示等功能。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/一键难忘520/article/detail/758706
推荐阅读
相关标签

