
- 1Redis ConnectionException
- 2大数据技术原理与运用习题总结_假设已经配置好环境变量,启动hdfs和关闭hdfs的命令分别是( )和( )
- 3用gitbash提交代码步骤_gitbash提交项目
- 4idea克隆github项目失败:unable to access ‘https://github.com/…’: Failed to connect to github.com port 443 a_idea克隆失败
- 5Vue-Ci搭建项目
- 6Android群英传-拼图游戏puzzle-代码设计和实现
- 7微信小程序生成分享二维码,自定义内容二维码_uniapp微信小程序将数据生成二维码并分享
- 8Python 用Ursina 3D引擎做一个太阳系行星模拟器_ursina获取鼠标准心
- 9Java 生成X.509 V3证书_java生成数字证书
- 10【QML 底层依赖机制】入门 QML:核心机制与灵活选择_qml 设置ui样式 全局设置
51单片机模拟十字路口红绿灯小课设_51单片机红绿灯
赞
踩
如需要源文件可以添加qq群聊获取:662177587
概要
实际设计图
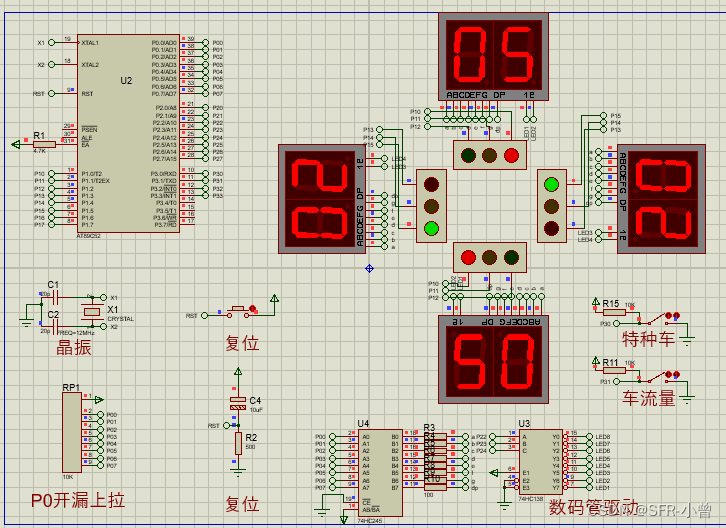
设计内容
本课题对基于单片机的交通灯控制系统进行设计。以单片机为控制核心,设计并制作交通灯控制系统,用于十字路口的车辆及行人的交通管理。东西南北四个路口通行指示灯,并分别用计时器显示路口通行转换剩余时间, 在特种车辆如110、120通过路口时,系统可自动转为特种车辆放行,其他车辆禁止通行状态。模拟交通信号灯的交替变换;最大限度的提高交通的顺畅交替运行;系统硬件设计与实现;节省能源消耗。
(1) 设计交通灯状态的管理方案;
(2) 设计单片机的最小系统和周边电路;
(3) 设计整个系统的电路分布和接线;
(4) 使用C语言编写整个系统运行的程序。
研究目标
设计一个基于单片机的十字路口交通灯控制电路,要求南北方向和东西方向两个交叉路口的车辆交替运行,车流量大,通行时间长,车流量小,通行时间短。每次绿灯变红灯时,要求黄灯先亮5S,才能变换运行车辆。东西方向、南北方向车道除了有红、黄、绿灯指示外,每一种灯亮的时间都用数码管显示器进行显示(采用倒计时的方法)。考虑到特殊车辆情况,设置紧急转换开关。
整体架构流程
首先我们应知道实际的十字路口灯的运转情况,在十字路口观察可以发现,主要由红黄绿三种颜色构成,在绿灯向红灯切换时会有一小部分的黄灯警告阶段,而红灯向绿灯转换时并没有。
由此我们可以使用一个状态机,分别表示红绿灯在一个循环内的所有情况。
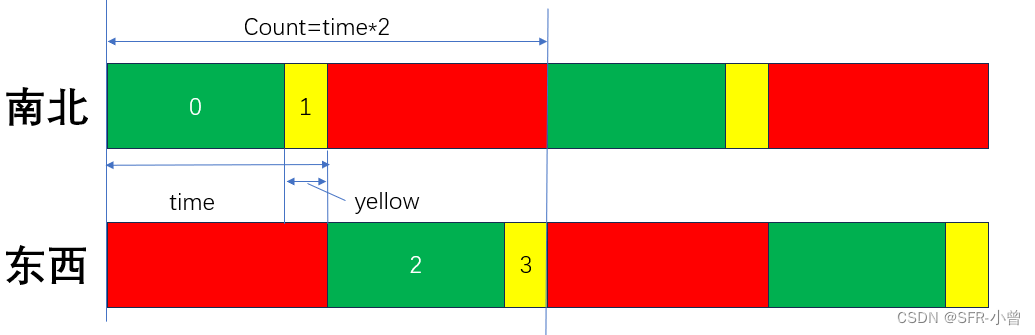
如图上图所示,设初始状态为0态,此时南北为绿灯,东西为红灯;1态为绿灯向红灯过渡的黄灯态;2态时东西为绿灯,南北为红灯;3态时东西为黄灯,南北依然是红灯,接着进入下一循环。
因此只要设定红灯的时间time和黄灯过渡的时间yellow即可,count是一个1秒自动加一的变量。通过该变量则可以判断出当前处于哪一状态,当count=time*2时,进入下一循环。
倒计时和状态的计算如下所示:
- 0-判断:count<time-yellow,
- 南倒计时=time-yellow-count,
- 东倒计时=time-count
-
- 1-判断:time-yellow<count<time,
- 南倒计时=yellow-(count-(time-yellow)),
- 东倒计时=time-count
-
- 2-判断:time<count<time*2-yellow,
- 南倒计时=time-(count-time)
- 东倒计时=(time-yellow)-(count-time)
-
- 3-判断:time*2-yellow<count<time*2
- 南倒计时=time-(count-time)
- 东倒计时=yellow-(count-time-(time-yellow))
-
- Count=2*time则清零

技术细节
具体的细节可以参照下面的代码:
- main函数
- #include <STC89C5xRC.H>
- #include "Timer0.h"
- #include "Nexie.h"
-
- unsigned char short_time = 20; //³µÁ÷Á¿Ð¡Ê±¼ä
- unsigned char long_time = 35; //³µÁ÷Á¿´óʱ¼ä
- unsigned char yellow = 3; //»ÆµÆʱ¼äӦСÓÚÕý³£Ê±¼ä
-
- unsigned char run_flag = 0;
-
- unsigned char h_time,v_time;//ˮƽºÍ´¹Ö±·½Ïòµ¹¼ÆʱÏÔʾ±äÁ¿
-
- bit spec_flag=0;//ÓÐÎÞÌØÖÖ³µ±ê־λÓÐΪ1£¬ÎÞΪ0
- bit liul_flag=0;//³µÁ÷Á¿±ê־λСΪ0£¬´óΪ1
-
- unsigned int count=0; //¶¨Ê±Æ÷×ܼÆʱʱ¼ä
- unsigned char time; //´æ´¢ÕæʵʹÓõÄÊÇlong»¹ÊÇshortʱ¼ä
- /**
- * @brief ÑÕÉ«Åжϼ°ÏÔʾ
- * @param ÎÞ
- * @retval ÎÞ
- */
- void led_color(void)
- {
- if(spec_flag==0)//ÏÈÈ·¶¨²»ÊÇÔÚÌØÖÖ³µÇé¿öÏÂ,·Ö0-3ÖÖÇé¿öÌÖÂÛ
- {
- switch(run_flag)
- {
- case 0:
- P10=0;P11=0;P12=1;
- P13=1;P14=0;P15=0;break;
- case 1:
- P10=0;P11=1;P12=0;
- P13=1;P14=0;P15=0;break;
- case 2:
- P10=1;P11=0;P12=0;
- P13=0;P14=0;P15=1;break;
- case 3:
- P10=1;P11=0;P12=0;
- P13=0;P14=1;P15=0;break;
- }
- }
- else //ÌØÖÖ³µÇé¿öÈ«²¿ÁÁºìµÆ
- {
- P10=1;P11=0;P12=0;
- P15=0;P14=0;P13=1;
- }
- }
-
- /**
- * @brief °´¼üɨÃè
- * @param ÎÞ
- * @retval ÎÞ
- */
- void Key_Loop()
- {
- if(P30==0) //ÌØÖÖ³µ°´¼ü°´ÏÂÖñê־λspec_flag
- {
- spec_flag=1;
- }
- else
- {
- spec_flag=0;//·ñÔòspec_flagÇåÁã
- }
- if(P31==0)
- {
- liul_flag=1;//³µÁ÷Á¿´ó°´¼ü°´ÏÂÖñê־λliul_flag
- time=long_time;
- }
- else
- {
- liul_flag=0;//·ñÔòliul_flagÇåÁã
- time=short_time;
- }
- }
- /**
- * @brief ÊýÂë¹ÜÊý×ÖÏÔʾ
- * @param ÎÞ
- * @retval ÎÞ
- */
- void num_show()
- {
- if(spec_flag==0) //ÏÈÈ·¶¨²»ÊÇÔÚÌØÖÖ³µÇé¿öÏÂÏÔʾµ¹¼Æʱ
- {
- Nixie_SetBuf(1,v_time/10%10);
- Nixie_SetBuf(2,v_time%10);
- Nixie_SetBuf(3,h_time/10%10);
- Nixie_SetBuf(4,h_time%10);
- }
- else //ÊÇÔÚÌØÖÖ³µÇé¿öÏ£¬µ¹¼ÆʱÏÔʾ¡°--¡±
- {
- Nixie_SetBuf(1,10);
- Nixie_SetBuf(2,10);
- Nixie_SetBuf(3,10);
- Nixie_SetBuf(4,10);
- }
- }
-
- void main()
- {
- Timer0_Init(); //¶¨Ê±Æ÷0³õʼ»¯
-
- while(1)
- {
- num_show(); //Ñ»·É¨Ãè
- led_color();
- }
- }
-
- /**
- * @brief ¶¨Ê±Æ÷0µÄÏà¹Ø²Ù×÷
- * @brief ¶¨Ê±Æ÷0Ϊģʽ1,16Ϊ²»×Ô¶¯ÖØÔØ,1msÖжÏ
- * @param ÎÞ
- * @retval ÎÞ
- */
- void Timer0_Routine() interrupt 1
- {
- static unsigned int T0Count0,T0Count1,T0Count2;//¶¨Ê±Æ÷Ïà¹Ø±äÁ¿
- TL0 = 0x18; //ÉèÖö¨Ê±³õʼֵ
- TH0 = 0xFC; //ÉèÖö¨Ê±³õʼֵ
-
- T0Count0++;T0Count1++;T0Count2++;//ÿ1ms½øÐÐÒ»´Î++£»
-
- if(T0Count0>=10)//10msµ÷ÓÃÒ»´ÎKey_Loop()º¯Êý
- {
- T0Count0=0;
- Key_Loop();
- }
- if(T0Count1>=2)//2msµ÷ÓÃÒ»´ÎNixie_Loop()º¯Êý
- {
- T0Count1=0;
- Nixie_Loop();
- }
- if(T0Count2>=1000)//1Ãë½øÈëÒ»´Î
- {
- T0Count2=0;
-
- if(spec_flag==0)//Èç¹û²»ÊÇÌØÊâÇé¿öÔò¿ªÆô¼ÆÊý
- {
- count++;
- if(count==2*time)
- {count=0;run_flag=0;}
-
- if(count<=time-yellow)
- {
- run_flag=0;//ÅжÏΪ״̬0
- v_time=time-yellow-count;
- h_time=time-count;
- }
- else if(time-yellow<count && count<=time)
- {
- run_flag=1;//ÅжÏΪ״̬1
- v_time=yellow-(count-(time-yellow));
- h_time=time-count;
- }
- else if(time<count && count<=time*2-yellow)
- {
- run_flag=2;//ÅжÏΪ״̬2
- v_time=time-(count-time);
- h_time=(time-yellow)-(count-time);
- }
- else if(time*2-yellow<count && count<time*2)
- {
- run_flag=3;//ÅжÏΪ״̬3
- v_time=time-(count-time);
- h_time=yellow-(count-time-(time-yellow));
- }
- }
- }
- }
- 定时器初始化.c
- #include <STC89C5xRC.H>
-
- /**
- * @brief ¶¨Ê±Æ÷³õʼ»¯
- * @param ÎÞ
- * @retval ÎÞ
- */
- void Timer0_Init(void) //100us@12.000MHz
- {
- TMOD &= 0xF0; //¶¨Ê±Æ÷ʱÖÓ12Tģʽ
- TMOD |= 0x01; //ÉèÖö¨Ê±Æ÷ģʽ
- TL0 = 0x18; //ÉèÖö¨Ê±³õʼֵ
- TH0 = 0xFC; //ÉèÖö¨Ê±³õʼֵ
- TF0 = 0; //Çå³ýTF0±êÖ¾
- TR0 = 1; //¶¨Ê±Æ÷0¿ªÊ¼¼Æʱ
- ET0=1;
- EA=1;
- PT0=0;
- }
- 定时器初始化.h
- #ifndef __TIMER0_H__
- #define __TIMER0_H__
-
- void Timer0_Init(void);
-
- #endif
- 数码管.c
- #include <STC89C5xRC.H>
- #include "Delay.h"
- unsigned char Nixie_Buf[11]={0,10,10,10,10};//0ÊÇΪÁËÕÕÓ¦loopÖÐi=1
- unsigned char NixieNumb[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F,0x40};
-
- /**
- * @brief Íⲿµ÷ÓöÔÊý×éNixie_Buf[4]¸³Öµ
- * @brief ʹµÃloopº¯ÊýÑ»·¶Ôscanº¯Êý¸³ÖµÊ±¶Áµ½ÏàÓ¦Êý¾Ý
- * @brief δ¸³ÖµµÄÊý×éλ¼´Îª10£»¶ÔÓ¦NixieNumb[]ÖеÄ0£»
- * @param Table,NumberÔÚNixie_BufÊý×éµÄÏÂ±ê ¸³µÄÖµ£¨¸ÃÖµ¼´¶ÔÓ¦NixieNumb[]ÖеÄÖµ£©
- * @retval ÎÞ
- */
- void Nixie_SetBuf(unsigned char Table,Number)
- {
- Nixie_Buf[Table]=Number;
- }
-
- /**
- * @brief ÊýÂë¹ÜÏÔʾ
- * @param Table,NumberÏÔʾµÄλÖà ÏÔʾµÄÊý×Ö
- * @param Á½²ÎÊýÓɶ¨Ê±Æ÷°´ÖÜÆÚɨÃèʱ¸ø¶¨
- * @retval ÎÞ
- */
- void Nixie_Scan(unsigned char Table,Number)
- {
- P0=0x00;//ÏûÒþ
- switch(Table)
- {// P2_4=C-4,P2_3=B-2;P2_2=A-1
- case 1:P24=1;P23=1;P22=1;break;
- case 2:P24=1;P23=1;P22=0;break;
- case 3:P24=1;P23=0;P22=1;break;
- case 4:P24=1;P23=0;P22=0;break;
- }
- P0=NixieNumb[Number];//²»ÓÃdelayÔÙÏûÒþ£¬ÒòΪ¶¨Ê±Æ÷½øÀ´ÓÐʱ¼ä¼ä¸ô
-
- }
- /**
- * @brief ¶¨Ê±Æ÷µ÷Óõĺ¯Êý
- * @param ÎÞ
- * @retval ÎÞ
- */
- void Nixie_Loop(void)//¶¨Ê±Æ÷ÿ½øÒ»´Î¾Íµ÷ÓÃÒ»´Îscanº¯Êý
- { //ʹµÃ3¸öÊýÂë¹ÜÒÀ´Î¿ìËÙÏÔʾ
- static unsigned char i=1;
- Nixie_Scan(i,Nixie_Buf[i]);
- i++;
- if(i>=5)i=1;
- }
- 数码管.h
- #ifndef __NEXIE_H__
- #define __NEXIE_H__
-
- void Nixie_Scan(unsigned char Table,Number);
- void Nixie_Loop(void);
- void Nixie_SetBuf(unsigned char Table,Number);
-
- #endif
小结
本课题对基于单片机的交通灯控制系统进行设计。以单片机为控制核心,设计并制作交通灯控制系统,用于十字路口的车辆及行人的交通管理。
如需要源文件可以添加qq群聊获取:662177587
希望对你有所帮助!

