- 1神经辐射场 3D 重建——NeRF
- 2支架预压弹性变形值计算_2K312012模板、支架的设计、制作与拆除·2020年二级建造师精讲课...
- 3vscode ctrl/command + 鼠标左键无法跳转_苹果电脑 vscode command+鼠标左键不跳转方法
- 4uinapp微信小程序隐私政策授权_uniapp 微信隐私授权
- 5Mate50落后又贵,iPhone性能超强更便宜,消费者还期待华为?
- 6micro:bit是什么?小学生拿着它就能召唤神龙?_microbit
- 7华为OD机试 - 智能驾驶(Java & JS & Python & C & C++)
- 8WIN10安装CUDA保姆级教程[2023.5.7更新]
- 92022秋 - C实验A类 –实验6 二维数组与字符数组_输入格式: 输入的第一行给出正整数n(1
- 10scikit-learn——机器学习应用开发的步骤_scikit-learn==0.21.0
自动驾驶决策规划控制ros移植Apollo和autoware算法可跑工程(适合入门学习,科研和实战)_apollo ros移植
赞
踩
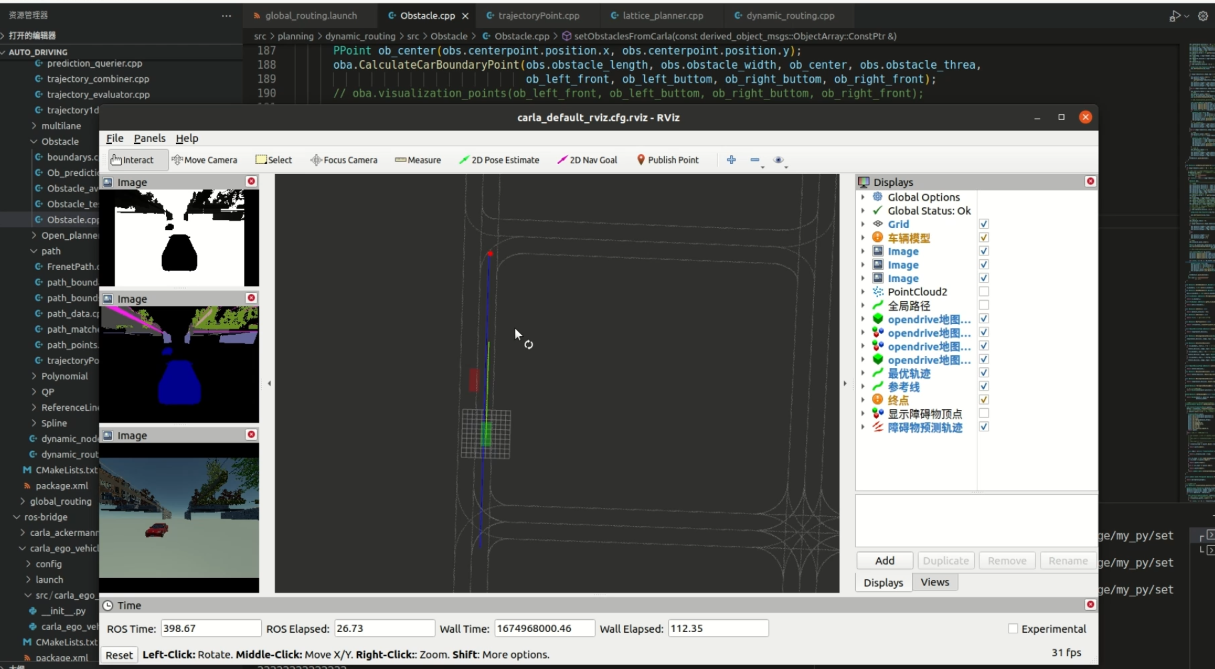
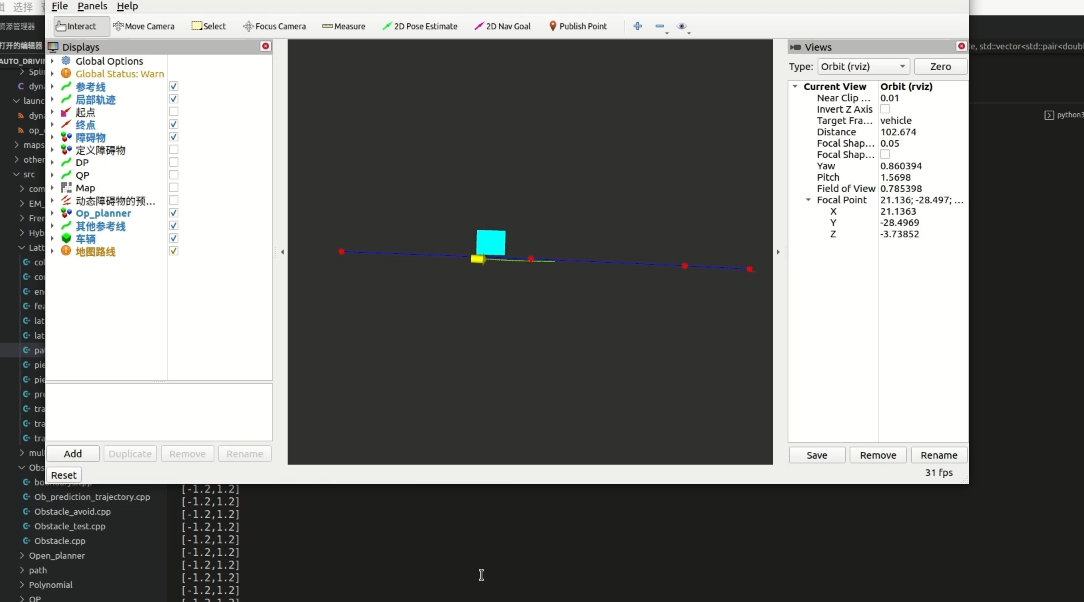
从零开始学习自动驾驶路径规划实战(包括Apollo,autoware规划算法等,以及一些基础控制算法)
自动驾驶路径规划控制ros1和ros2移植Apollo和autoware规控算法可跑工程(适合入门学习,科研和实战),不仅包括移植Apollo和autoware规划算法,还包括其他规划算法,与carla联合仿真实现规划控制,autoware-carla联合仿真,Lanelet高精度地图构建,强化学习等等,基本涵盖了公司算法的基本要求。从入门到掌握的一系列算法的应用,学会工程代码实战,包括ros1和ros2。具体效果视频请看主页视频:
bibi个人主页
注意,本套优化理论涉及比较浅,主要以丰富实战经验为主!介意者慎拍。作者只测试了ubuntu18.04和ubuntu20.04双系统,工程是源码形式,只有autoware.ai才有docker。虚拟机的carla容易出问题,虽然可以自己用docker系统测试,但也慎拍。没有接触过ros1和ros2,还有Ubuntu基础的,也可以购买,虽然说套餐以学习算法开发为主,但是ros和ubuntu这些基础知识,在群里多多少少也会有交流,也可以同步学习到。
经过和群友的学习测试,通过以下ros版本:
ros1: melodic, noetic
ros2:eloquent, foxy, galactic
共九个套餐,每个套餐包含的内容如下:
(1)整套-涵盖的内容如下:
前言课 第一节-ros工程的创建 第一节-运行环境和工程目录简介 第二节-工程运行和小车模型搭建简介 第二节-车辆里程计 第三节-地图路线构建方法 第三节-参考线平滑函数 第三节-参考线平滑原理(一) 第三节-参考线平滑原理(二) 第四节-lqr控制器、pid控制器、stanley控制器、pure_pursuit控制器代码简介(已添加mpc控制算法) 第五节-局部规划器代码简介 第五节-Frenet坐标系和参考线参数计算 第六节-模拟障碍物的生成函数介绍 第六节-模拟障碍物的生成方法介绍 第六节-障碍物函数类的介绍 第七节-基于Frenet采样规划原理(一) 第七节-基于Frenet采样规划原理(二) 第七节-基于Frenet采样规划原理(三) 第七节-基于Frenet采样规划总结 第七节-基于Frenet采样规划的补充-停止模式 第八节-Lattice规划算法-函数介绍(第八节-Lattice规划算法原理一) 第八节-Lattice规划算法-障碍物的SL图和ST图(一) 第八节-Lattice规划算法-障碍物的SL图和ST图(二) 第八节-Lattice规划算法-巡航模式的速度采样 第八节-Lattice规划算法-超车和跟车速度采样(一) 第八节-Lattice规划算法-超车和跟车速度采样(二) 第八节-Lattice规划算法-横向采样与二次规划 第八节-Lattice规划算法-二次规划(一) 第八节-Lattice规划算法-二次规划(二) 第八节-Lattice规划算法-二次规划(三) 第八节-Lattice规划算法一-代价函数 第八节-Lattice规划算法-合成函数和碰撞检测 第八节-Lattice规划算法效果演示 第九节-Em规划算法-函数介绍 第九节-Em规划算法-路径规划DP介绍 第九节-Em规划算法-路径规划QP函数介绍 第九节-Em规划算法-路径规划QP原理和效果显示 第九节-Em规划算法-速度规划DP介绍 第九节-Em规划算法-速度规划QP介绍 第九节-Em规划算法-效果演示 第十节-混合A星算法(一) 第十节-混合A星算法(二) 第十节-混合A星算法(三) 第十节-混合A星算法(四) 第十节-混合A星算法(五) 第十节-混合A星算法效果演示-泊车场景 第十一节-变道规划算法-变道算法介绍 第十一节-变道规划算法-Lattice超车和跟车效果演示 第十一节-变道规划算法-变道算法决策过程(一) 第十一节-变道规划算法-变道算法决策过程(二) 第十一节-变道规划算法-效果演示 第十二节-open planner规划算法-介绍 第十二节-open planner规划算法-效果演示 第十三节-carla-ros联合仿真-carla介绍与版本选择 第十三节-carla-ros联合仿真-carla环境配置与运行 第十三节-carla-ros联合仿真-PythonAPI例子介绍 第十三节-carla-ros联合仿真-PythonAPI应用示例 第十三节-carla-ros联合仿真-ros-bridge的介绍 第十三节-carla-ros联合仿真-ros-bridge的使用 第十三节-carla-ros联合仿真-ros-bridge的代码讲解 第十三节-carla-ros联合仿真-ros-bridge的坑 第十三节-carla-ros联合仿真-ros-bridge的演示 第十三节-carla-ros联合仿真-切回ros单独仿真 carla-ros联合仿真-避开静态障碍物 carla-ros联合仿真-跟随动态障碍物 第十四节-Lanelet教程-JOSM的使用(一) 第十四节-Lanelet教程-JOSM的使用(二) 第十四节-Lanelet教程-JOSM的使用(三) 第十四节-Lanelet教程-Lanelet加载osm地图文件 第十四节-Lanelet教程-JOSM画图补充注意点 第十四节-Lanelet教程-参考博文学习 第十四节-Lanelet教程-Lanelet规划模块 第十五节-autoware.ai使用教程-前言课 第十五节-autoware.ai使用教程-docker安装 第十五节-autoware.ai使用教程-源码安装 第十五节-autoware.ai使用教程-demo运行 第十五节-autoware.ai使用教程-carla联合仿真实现规划控制(停障)-docker 第十五节-autoware.ai使用教程-carla联合仿真open planner 避障 -docker 第十六节-carla泊车场景-dl-iaps优化算法流程简介与效果演示 第十六节-carla泊车场景搭建 第十六节-carla泊车场景-dl-iaps优化算法carla实战 第十七节-基础代码的ros2版本 第十八节-开放空间算法之DWA planner和teb算法实战 第十九节-carla交叉口场景-交叉口规划决策实战 第二十节-强化学习交叉口决策入门项目示例-python工程推荐 第二十一节-autoware.universe规控carla联合仿真使用教程(待更新) 第二十一节-交叉口的轨迹预测规划(待更新) 第二十一节-highway强化学习教程(待更新)

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
(2)基础代码ros1版本-涵盖的内容如下:
前言课 第一节-ros工程的创建 第一节-运行环境和工程目录简介 第二节-工程运行和小车模型搭建简介 第二节-车辆里程计 第三节-地图路线构建方法 第三节-参考线平滑函数 第三节-参考线平滑原理(一) 第三节-参考线平滑原理(二) 第四节-lqr控制器、pid控制器、stanley控制器、pure_pursuit控制器代码简介 第五节-局部规划器代码简介 第五节-Frenet坐标系和参考线参数计算 第六节-模拟障碍物的生成函数介绍 第六节-模拟障碍物的生成方法介绍 第六节-障碍物函数类的介绍 第七节-基于Frenet采样规划原理(一) 第七节-基于Frenet采样规划原理(二) 第七节-基于Frenet采样规划原理(三) 第七节-基于Frenet采样规划总结 第七节-基于Frenet采样规划的补充-停止模式 第八节-Lattice规划算法-函数介绍(第八节-Lattice规划算法原理一) 第八节-Lattice规划算法-障碍物的SL图和ST图(一) 第八节-Lattice规划算法-障碍物的SL图和ST图(二) 第八节-Lattice规划算法-巡航模式的速度采样 第八节-Lattice规划算法-超车和跟车速度采样(一) 第八节-Lattice规划算法-超车和跟车速度采样(二) 第八节-Lattice规划算法-横向采样与二次规划 第八节-Lattice规划算法-二次规划(一) 第八节-Lattice规划算法-二次规划(二) 第八节-Lattice规划算法-二次规划(三) 第八节-Lattice规划算法一-代价函数 第八节-Lattice规划算法-合成函数和碰撞检测 第八节-Lattice规划算法效果演示 第九节-Em规划算法-函数介绍 第九节-Em规划算法-路径规划DP介绍 第九节-Em规划算法-路径规划QP函数介绍 第九节-Em规划算法-路径规划QP原理和效果显示 第九节-Em规划算法-速度规划DP介绍 第九节-Em规划算法-速度规划QP介绍 第九节-Em规划算法-效果演示 第十节-混合A星算法(一) 第十节-混合A星算法(二) 第十节-混合A星算法(三) 第十节-混合A星算法(四) 第十节-混合A星算法(五) 第十节-混合A星算法效果演示-泊车场景 第十一节-变道规划算法-变道算法介绍 第十一节-变道规划算法-Lattice超车和跟车效果演示 第十一节-变道规划算法-变道算法决策过程(一) 第十一节-变道规划算法-变道算法决策过程(二) 第十一节-变道规划算法-效果演示 第十二节-open planner规划算法-介绍 第十二节-open planner规划算法-效果演示
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
(3)基础代码ros2版本-涵盖的内容如下:
前言课 第一节-ros工程的创建 第一节-运行环境和工程目录简介 第二节-工程运行和小车模型搭建简介 第二节-车辆里程计 第三节-地图路线构建方法 第三节-参考线平滑函数 第三节-参考线平滑原理(一) 第三节-参考线平滑原理(二) 第四节-lqr控制器、pid控制器、stanley控制器、pure_pursuit控制器代码简介 第五节-局部规划器代码简介 第五节-Frenet坐标系和参考线参数计算 第六节-模拟障碍物的生成函数介绍 第六节-模拟障碍物的生成方法介绍 第六节-障碍物函数类的介绍 第七节-基于Frenet采样规划原理(一) 第七节-基于Frenet采样规划原理(二) 第七节-基于Frenet采样规划原理(三) 第七节-基于Frenet采样规划总结 第七节-基于Frenet采样规划的补充-停止模式 第八节-Lattice规划算法-函数介绍(第八节-Lattice规划算法原理一) 第八节-Lattice规划算法-障碍物的SL图和ST图(一) 第八节-Lattice规划算法-障碍物的SL图和ST图(二) 第八节-Lattice规划算法-巡航模式的速度采样 第八节-Lattice规划算法-超车和跟车速度采样(一) 第八节-Lattice规划算法-超车和跟车速度采样(二) 第八节-Lattice规划算法-横向采样与二次规划 第八节-Lattice规划算法-二次规划(一) 第八节-Lattice规划算法-二次规划(二) 第八节-Lattice规划算法-二次规划(三) 第八节-Lattice规划算法一-代价函数 第八节-Lattice规划算法-合成函数和碰撞检测 第八节-Lattice规划算法效果演示 第九节-Em规划算法-函数介绍 第九节-Em规划算法-路径规划DP介绍 第九节-Em规划算法-路径规划QP函数介绍 第九节-Em规划算法-路径规划QP原理和效果显示 第九节-Em规划算法-速度规划DP介绍 第九节-Em规划算法-速度规划QP介绍 第九节-Em规划算法-效果演示 第十节-混合A星算法(一) 第十节-混合A星算法(二) 第十节-混合A星算法(三) 第十节-混合A星算法(四) 第十节-混合A星算法(五) 第十节-混合A星算法效果演示-泊车场景 第十一节-变道规划算法-变道算法介绍 第十一节-变道规划算法-Lattice超车和跟车效果演示 第十一节-变道规划算法-变道算法决策过程(一) 第十一节-变道规划算法-变道算法决策过程(二) 第十一节-变道规划算法-效果演示 第十二节-open planner规划算法-介绍 第十二节-open planner规划算法-效果演示
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
(4)交叉口的lattcie仿真-涵盖的内容如下:
前言课 第一节-ros工程的创建 第一节-运行环境和工程目录简介 第二节-工程运行和小车模型搭建简介 第二节-车辆里程计 第三节-地图路线构建方法 第三节-参考线平滑函数 第三节-参考线平滑原理(一) 第三节-参考线平滑原理(二) 第四节-lqr控制器 第五节-局部规划器代码简介 第五节-Frenet坐标系和参考线参数计算 第六节-模拟障碍物的生成函数介绍 第六节-模拟障碍物的生成方法介绍 第六节-障碍物函数类的介绍 第七节-基于Frenet采样规划原理(一) 第七节-基于Frenet采样规划原理(二) 第七节-基于Frenet采样规划原理(三) 第七节-基于Frenet采样规划总结 第七节-基于Frenet采样规划的补充-停止模式 第八节-Lattice规划算法-函数介绍(第八节-Lattice规划算法原理一) 第八节-Lattice规划算法-障碍物的SL图和ST图(一) 第八节-Lattice规划算法-障碍物的SL图和ST图(二) 第八节-Lattice规划算法-巡航模式的速度采样 第八节-Lattice规划算法-超车和跟车速度采样(一) 第八节-Lattice规划算法-超车和跟车速度采样(二) 第八节-Lattice规划算法-横向采样与二次规划 第八节-Lattice规划算法-二次规划(一) 第八节-Lattice规划算法-二次规划(二) 第八节-Lattice规划算法-二次规划(三) 第八节-Lattice规划算法一-代价函数 第八节-Lattice规划算法-合成函数和碰撞检测 第八节-Lattice规划算法效果演示 第十三节-carla-ros联合仿真-carla介绍与版本选择 第十三节-carla-ros联合仿真-carla环境配置与运行 第十三节-carla-ros联合仿真-PythonAPI例子介绍 第十三节-carla-ros联合仿真-PythonAPI应用示例 第十三节-carla-ros联合仿真-ros-bridge的介绍 第十三节-carla-ros联合仿真-ros-bridge的使用 第十三节-carla-ros联合仿真-ros-bridge的代码讲解 第十三节-carla-ros联合仿真-ros-bridge的坑 第十三节-carla-ros联合仿真-ros-bridge的演示 第十三节-carla-ros联合仿真-切回ros单独仿真 carla-ros联合仿真-交叉口交通流搭建
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
(5)ros2-carla联合仿真-lattcie算法-涵盖的内容如下:
前言课 第一节-ros工程的创建 第一节-运行环境和工程目录简介 第二节-工程运行和小车模型搭建简介 第二节-车辆里程计 第三节-地图路线构建方法 第三节-参考线平滑函数 第三节-参考线平滑原理(一) 第三节-参考线平滑原理(二) 第四节-lqr控制器 第五节-局部规划器代码简介 第五节-Frenet坐标系和参考线参数计算 第六节-模拟障碍物的生成函数介绍 第六节-模拟障碍物的生成方法介绍 第六节-障碍物函数类的介绍 第七节-基于Frenet采样规划原理(一) 第七节-基于Frenet采样规划原理(二) 第七节-基于Frenet采样规划原理(三) 第七节-基于Frenet采样规划总结 第七节-基于Frenet采样规划的补充-停止模式 第八节-Lattice规划算法-函数介绍(第八节-Lattice规划算法原理一) 第八节-Lattice规划算法-障碍物的SL图和ST图(一) 第八节-Lattice规划算法-障碍物的SL图和ST图(二) 第八节-Lattice规划算法-巡航模式的速度采样 第八节-Lattice规划算法-超车和跟车速度采样(一) 第八节-Lattice规划算法-超车和跟车速度采样(二) 第八节-Lattice规划算法-横向采样与二次规划 第八节-Lattice规划算法-二次规划(一) 第八节-Lattice规划算法-二次规划(二) 第八节-Lattice规划算法-二次规划(三) 第八节-Lattice规划算法一-代价函数 第八节-Lattice规划算法-合成函数和碰撞检测 第八节-Lattice规划算法效果演示 (ros2版本的实现思路一致) 第十三节-carla-ros联合仿真-carla介绍与版本选择 第十三节-carla-ros联合仿真-carla环境配置与运行 第十三节-carla-ros联合仿真-PythonAPI例子介绍 第十三节-carla-ros联合仿真-PythonAPI应用示例 第十三节-carla-ros联合仿真-ros-bridge的介绍 第十三节-carla-ros联合仿真-ros-bridge的使用 第十三节-carla-ros联合仿真-ros-bridge的代码讲解 第十三节-carla-ros联合仿真-ros-bridge的坑 第十三节-carla-ros联合仿真-ros-bridge的演示 第十三节-carla-ros联合仿真-切回ros单独仿真 carla-ros2联合仿真-避开静态障碍物演示
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
(6)carla-ros联合仿真教程和demo-涵盖的内容如下:
第十三节-carla-ros联合仿真-carla介绍与版本选择
第十三节-carla-ros联合仿真-carla环境配置与运行
第十三节-carla-ros联合仿真-PythonAPI例子介绍
第十三节-carla-ros联合仿真-PythonAPI应用示例
第十三节-carla-ros联合仿真-ros-bridge的介绍
第十三节-carla-ros联合仿真-ros-bridge的使用
第十三节-carla-ros联合仿真-ros-bridge的代码讲解
第十三节-carla-ros联合仿真-ros-bridge的坑
第十三节-carla-ros联合仿真-ros-bridge的演示
第十三节-carla-ros联合仿真-切回ros单独仿真
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
(7)Lanelet搭建教程和demo-涵盖的内容如下:
第十四节-Lanelet教程-JOSM的使用(一)
第十四节-Lanelet教程-JOSM的使用(二)
第十四节-Lanelet教程-JOSM的使用(三)
第十四节-Lanelet教程-Lanelet加载osm地图文件
第十四节-Lanelet教程-JOSM画图补充注意点
第十四节-Lanelet教程-参考博文学习
第十四节-Lanelet教程-Lanelet规划模块
- 1
- 2
- 3
- 4
- 5
- 6
- 7
(8)autoware.ai使用教程-carla联合仿真open planner-涵盖的内容如下:
第十五节-autoware.ai使用教程-前言课
第十五节-autoware.ai使用教程-docker安装
第十五节-autoware.ai使用教程-源码安装
第十五节-autoware.ai使用教程-demo运行
docker-autoware.ai使用教程-carla联合仿真实现规划控制(停障)
docker-autoware.ai使用教程-carla联合仿真open planner 避障
- 1
- 2
- 3
- 4
- 5
- 6
(9)carla-ros1停车场场景研究案例-涵盖的内容如下:
前言课 第一节-ros工程的创建 第一节-运行环境和工程目录简介 第二节-工程运行和小车模型搭建简介 第二节-车辆里程计 第四节-lqr控制器 第五节-局部规划器代码简介 第六节-模拟障碍物的生成函数介绍 第六节-模拟障碍物的生成方法介绍 第六节-障碍物函数类的介绍 第十节-混合A星算法(一) 第十节-混合A星算法(二) 第十节-混合A星算法(三) 第十节-混合A星算法(四) 第十节-混合A星算法(五) 第十节-混合A星算法效果演示-泊车场景 第十三节-carla-ros联合仿真-carla介绍与版本选择 第十三节-carla-ros联合仿真-carla环境配置与运行 第十三节-carla-ros联合仿真-PythonAPI例子介绍 第十三节-carla-ros联合仿真-PythonAPI应用示例 第十三节-carla-ros联合仿真-ros-bridge的介绍 第十三节-carla-ros联合仿真-ros-bridge的使用 第十三节-carla-ros联合仿真-ros-bridge的代码讲解 第十三节-carla-ros联合仿真-ros-bridge的坑 第十三节-carla-ros联合仿真-ros-bridge的演示 第十三节-carla-ros联合仿真-切回ros单独仿真 第十六节-carla泊车场景-dl-iaps优化算法流程简介与效果演示 第十六节-carla泊车场景搭建 第十六节-carla泊车场景-dl-iaps优化算法carla实战
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
注意:整套包括基础代码部分,整套是ros1版本,基础代码有ros1和ros2部分,但是只有购买整套的才有ros2版本的基础代码。
本工程的特点:
1.课程视频主要是对代码的理解和逻辑讲解,相比Apollo和autoware源码易懂,更加轻量级,对硬件要求不高,再加上实战代码比理论重要很多,本工程可帮助大家从入门到学会应用,也方便大家加入自己的算法idea。要注意,此课程教大家以实战为主,入门自动驾驶软件框架,丰富实战经验为主。
2.有学习交流社区,除了配置报错答疑,大家还志同道合,可以入学开始交流技术,学习几年,毕设,课设,项目,工作,四不误。
3.与市面其他课程代码不同,本工程是一套整体算法,而不是零散的算法工程,这样的好处是方便移植到实车,做科研实验,写入面试简历,丰富自己的项目经验。接实车就是把定位模块的订阅信息替换实车的定位,感知模块的信息替换为接收真实车的障碍物等信息。
4.本工程可以节省大量的代码开发时间,为更多想学习自动驾驶的人避坑引路,学会调试改bug。
5.本工程C++为主,联合仿真也涉及python。
6.购买可得源码+交流答疑群+代码讲解视频+工程经验学习交流。
7.autoware的使用并非系列的重点,所以本人涉及的只是入门的冰山一角,如果专门想学透autoware,谨慎购买。
8.有人可能会问移植了Apollo哪个版本的代码,其实个人觉得每个版本规控算法修改不多,可能有增加一些优化算法,但是旧版的比如lattice或者dl-iaps等会保留,所以这个版本问题不是很重要的,只需要关注算法的变化情况。
9.本人移植的EM planner还不够完善,希望有大佬加入一起交流完善。
10.本工程具有计算机软件著作权,请尊重作者的知识产权,仅供个人使用。若不再使用请删除。
个人建议:
1.想学习相关方向的同学尽早加入,本科或者研一,不然后面会感叹当初觉悟不够。
2.没有完美无缺的算法,急需待更新内容不建议购买,因为本人也在修炼,更新比较慢。
3.学生购买可分期。
4.适合人群:科研学生,刚入职规控的工作人员,需要丰富面试简历的求职学生,入门规控的人。
5.围绕ros1版本进行算法的学习应用,ros1还是比较好入门的。ros2版本主要是帮助大家了解ros2的C++开发基础。
6.一经购买进群后不得退款,因为是源码性质的内容,请考虑清楚再下单。
希望可以集合各位学习研究自动驾驶的小伙伴们一起交流,欢迎加入社区!
购买途径
本工程全网独一无二,只在以下常见平台进行宣传售卖,大家注意下单正版
1.咸鱼

2.咸鱼

3.b站

4西瓜
5博客