
- 1基于云开发快速搭建智能名片小程序_做一个名片小程序
- 2探寻计算世界的进化:硬件、软件与未来发展_随着信息技术的飞速发展,软件、硬件
- 3【课程项目】BIT人工智能大作业:五子棋游戏_人工智能实验五子棋
- 4GitHub 创建分支 (branch) 并提交分支_git 新建branch
- 5华为认证传送网工程师 HCIA-Transmission V2.5(中文版)正式发布_hcia transmission 2.5
- 6海外云服务对比: AWS、GCP、Azure 与 DigitalOcean_aws 多收费
- 7【教程】使用 UnityWebRequest 进行 Post Json内容_unitywebrequest.post
- 8mac系统u盘启动盘制作教程,更新至macOS Sonoma 14_苹果电脑启动盘
- 9【头歌-Python】Python第六章作业(初级)_初始化一个空列表,输入一个正整数 n。 接下来,你将被要求输入 n 个指令,每得到一
- 10AI安全领域的“雨山机车大赛”,改变了什么?
循迹避障小车制作第一篇(tb6612模块与降压模块的使用)
赞
踩
TB6612 如何驱动电机与降压模块的基本使用
一.TB6612模块

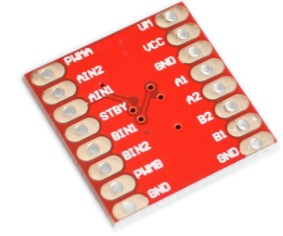
1.TB6612的接线
tb6612是双电机驱动,即可同时驱动两个电机,有四种电机控制模式:正转/反转/制动/停止
VM :5V-10V电压
VCC:逻辑电平输入(接到C8t6上时,接3.3v或5v都可)
M1电机控制端:
pwmA:接到c8t6的pwm输出引脚上(c8t6的pwm是通过定时器输出的,对照数据手册找到相应的定时器pwm输出通道即可)
AIN1\AIN2:接到c8t6的io口(一个为高电平,另一个为低电平即可使电机转动)
AO1\AO2:接电机线
M2电机控制端:
pwmB:接到c8t6的pwm输出引脚上(c8t6的pwm是通过定时器输出的,对照数据手册找到相应的定时器pwm输出通道即可)
BIN1\BIN2:接到c8t6的io口(一个为高电平,另一个为低电平即可使电机转动)
BO1\BO2:接电机线
STBY:这是模块工作状态控制端,高电平工作,低电平不工作(使用时可连接到c8t6的io口,只需把此io口设置为高电平即可)
GND:接地,连接一个即可
2.tb6612控制电机的正反转和转速
正反转是通过AIN1、AIN2、BIN1、BIN2四个引脚控制的,而电机转速是通过PWMA、PWMB控制的
真值表

可以看出只需改变AIN1、AIN2、BIN1、BIN2的高低电平就可实现电机的正反转。
而转速的改变是通过改变pwm的占空比来实现的,高电平占空比越小电机转速越慢,本人的理解是电机在单位时间内接到的高电平时间减少,他的速度就会变慢
下面附上我的pwm输出配置的代码,我是采用了定时器2的通道3和通道4来输出两路pwm波
void TIM2_PWM_Init(void) { GPIO_InitTypeDef GPIO_InitStruct; TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct; TIM_OCInitTypeDef TIM_OCInitStruct; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP; GPIO_InitStruct.GPIO_Pin=GPIO_Pin_2|GPIO_Pin_3; GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz; GPIO_Init(GPIOA,&GPIO_InitStruct); TIM_TimeBaseInitStruct.TIM_Period=899; TIM_TimeBaseInitStruct.TIM_CounterMode=TIM_CounterMode_Up; TIM_TimeBaseInitStruct.TIM_Prescaler=0; TIM_TimeBaseInitStruct.TIM_ClockDivision=TIM_CKD_DIV1; TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStruct); TIM_OCInitStruct.TIM_OCMode=TIM_OCMode_PWM2; TIM_OCInitStruct.TIM_OutputState=TIM_OutputState_Enable; TIM_OCInitStruct.TIM_OCPolarity=TIM_OCPolarity_High; TIM_OC3Init(TIM2,&TIM_OCInitStruct); TIM_OC4Init(TIM2,&TIM_OCInitStruct); TIM_OC3PreloadConfig(TIM2,TIM_OCPreload_Enable); TIM_OC4PreloadConfig(TIM2,TIM_OCPreload_Enable); TIM_ARRPreloadConfig(TIM2,ENABLE); TIM_Cmd(TIM2,ENABLE); }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
下面是轮子向前转的代码
void car_go(void)
{
TIM_SetCompare3(TIM2,200);
TIM_SetCompare4(TIM2,200);
}
- 1
- 2
- 3
- 4
- 5
至于轮子的左转、右转、后退只需通过控制轮子转向与转速即可
二.电源降压模块
我用的是从实验室找到的LM2596S DC可调降压模块

可以看到一共有四个引脚,IN+\IN-是输入端,分别接到电源的正负极,out+\out-是输出端,分别接到c8t6的5v或3.3v和GND,
特别注意:
1.输入、输出不可接反,接反可能会烧毁芯片
2.输入的电压必须比要输出的电压高1.5v以上。且不能用来升压。
当降压值为达到我们所需要的电压值时,我们可通过转动模块上的小黄色柱体,来调节降压值,如图所示

逆时针旋转是降压幅度增大,顺时针旋转是降压幅度减小。
了解了这两个模块,就可以把c8t6,tb6612,电池,降压模块,以及两轮小车连接起来,实现小车的基本走动了。
本人小白一个,文中如有错误还请见谅。

