
热门标签
热门文章
- 1网络安全综合实验(eNSP)(DHCP、OSPF、NAT、防火墙、ACL)_ensp安全实验
- 2Python根据文件名划分文件_python分割文件名
- 3Diffusion Model, Stable Diffusion, Stable Diffusion XL 详解
- 4[转]Bram和Dram的区别
- 5中兴新支点操作系统小教程——用户_中兴新支点系统拷贝文件
- 6Windows Server安全日志与系统事件变更审计_windows server2008 安全日志审计
- 7git merge 回退_git常用命令
- 8运行stable-diffusion-webui-directml时报RuntimeError: Torch is not able to use GPU的错误解决办法_torch is not able to use gpu;
- 9常用游戏服务架构(http,golang技术版)_golang 游戏框架 http
- 10SpringBoot 解决跨域问题的 5 种方案!_springboot跨域配置
当前位置: article > 正文
PX4+QGC+jmavsim软件在环仿真_px4 qgc javsim仿真
作者:不正经 | 2024-05-30 16:09:03
赞
踩
px4 qgc javsim仿真
一、环境修改
参考官方手册jMAVSim 仿真模拟 · PX4 Developer Guide,以上环境基于上一篇内容,未完成ROS+jmavsim+QGC环境搭建的请移步Ubuntu18.04下px4+MAVROSM+QGC地面站安装教程及避坑指南
下面开始正式内容,首先需要对环境进行适当更改
- sudo apt install openjdk-8-jdk
- sudo update-alternatives --config java # 选择Java 8 的指令
- rm -rf Tools/jMAVSim/out
编辑accessibility.properties 文件:
sudo gedit /etc/java-8-openjdk/accessibility.properties
注释掉下面这行
#assistive_technologies=org.GNOME.Acessibility.AtkWrapper
二、 启动仿真
做好了以上准备工作后,输入以下命令,注意这句话可以代替make px4_sitl_default,同时也会启动jmavsim界面
make px4_sitl_default jmavsim

然后启动QGC地面站,此时 QGC会自动连接jmavsim,

在命令框内输入enter,然后输入
commander takeoff如下图所示:

此时会看到飞机起飞,在起飞状态下,你可以在QGC中设置目标点,飞机会自动飞行到目标点,如下图所示。
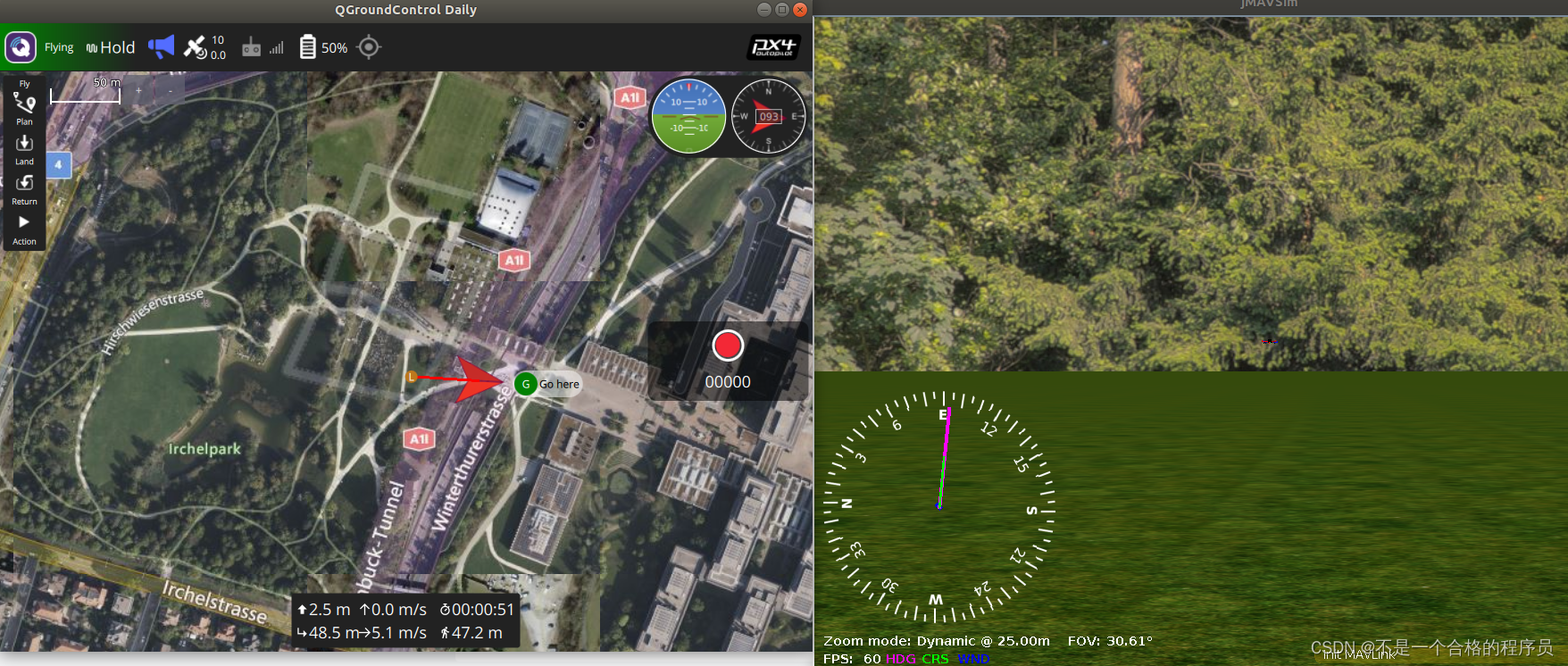
此时,就已经完成了一次软件在环仿真实验。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/不正经/article/detail/647685
推荐阅读
- 一、注册页面效果图注册的页面布局;
[详细] -->赞
踩
相关标签

