
- 1在美团,我从暑期实习到转正
- 2python胶水语言?Python的简介及下载安装_python 胶水语言
- 3深圳 Community Day 活动剧透!惊喜彩蛋等你发现!
- 4Docker 容器镜像删除命令_docker用什么命令删除容器
- 5【愚公系列】2024年03月 《AI智能化办公:ChatGPT使用方法与技巧从入门到精通》 011-用 ChatGPT 生成文章(文章的生成策略)
- 6使用LangSmith来快速学习LangChain_langsmith 邀请码
- 7Mysql- 流程函数-(If, CASE WHEN)的使用及练习_mysql if函数的使用
- 8写一个程序,分析一个文本文件(英文文章)中各个单词出现的频率,并且把频率最高的10词打印出来_编写程序,统计输入英文文章中不同单词出现的次数,并输入出现频率最高的单词。
- 9顺序表、栈(stack)、队列(queue)(Python实现)_基于列表实现stack类、queue类、priorityqueue类python
- 10使用Python 机器学习-5-Python Mini Project–使用深度学习进行乳腺癌分类
3DGS学习(三)—— 球谐函数_3dgs 球谐函数
赞
踩
球谐函数
直观了解
参考文章:https://zhuanlan.zhihu.com/p/351289217
球谐函数可以类比泰勒展开,傅里叶级数。都是通过一组不同阶的基函数线性组合而成,只不过傅里叶级数的基函数是三角函数,而球谐函数的基函数是球函数。即正交基为球函数,极坐标即球函数系数。
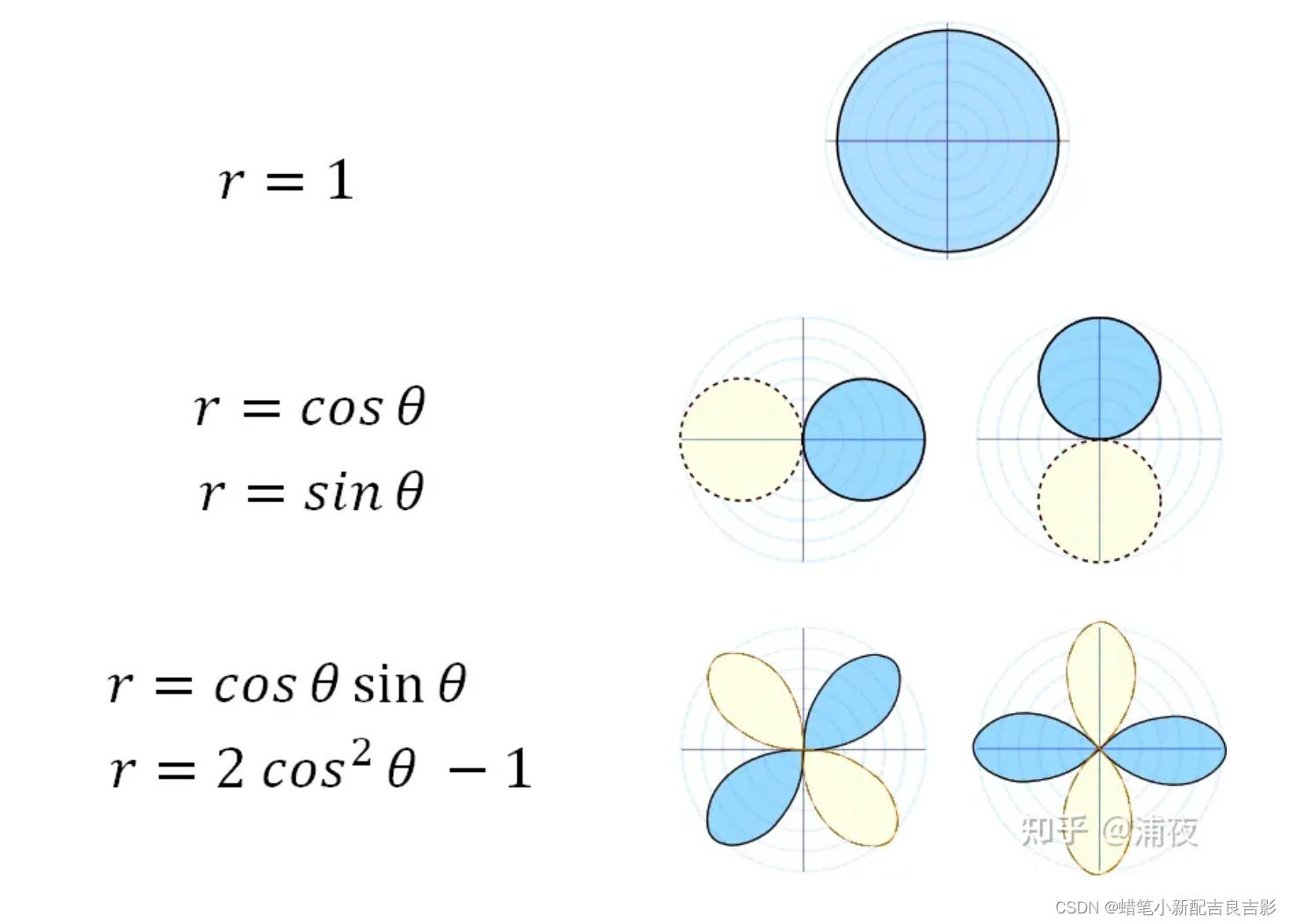
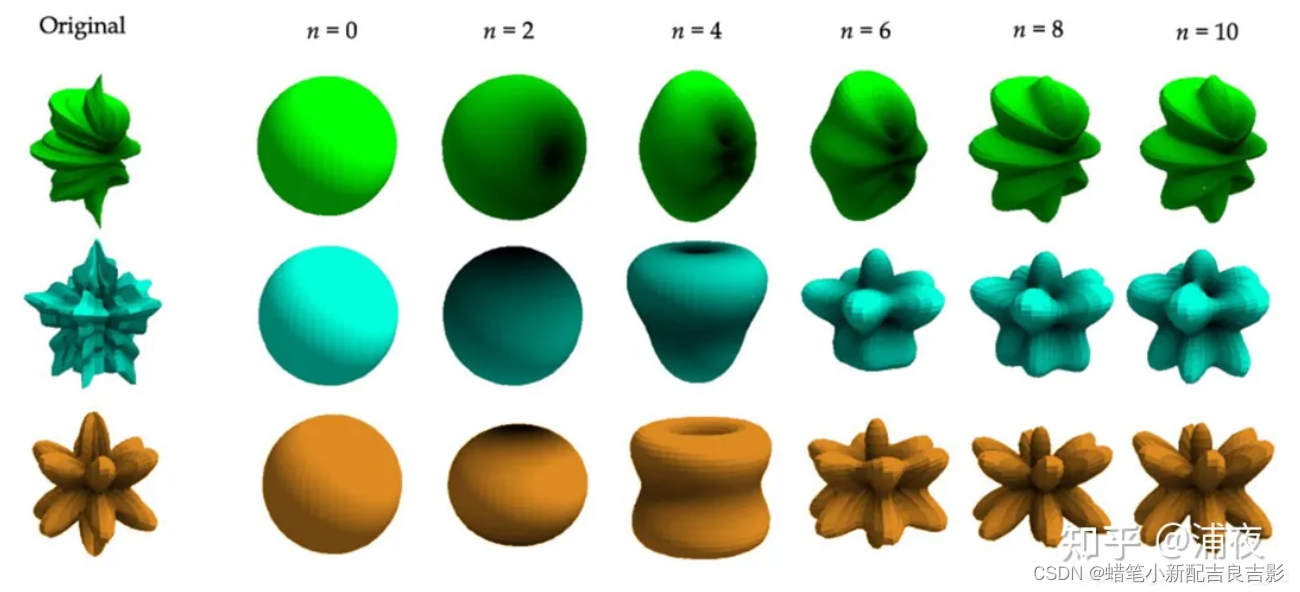
同样就像傅里叶变换拟合曲线一样,球谐函数拟合3d物体时,所用阶数越高,拟合越贴切,但是也有可能出现过拟合的情况。
球谐函数性质
- 正交性:各个基函数之间线性独立
- 旋转不变性:环境光照变化之后只需要简单的计算就可以得到光源旋转之后的结果,在后续应用中补充。
若将函数所表示的距离变成颜色上的数值差异,就可以用球谐函数来拟合颜色信息。
球谐光照
参考文章:
漫反射光照函数
L
(
p
,
w
o
)
=
∫
Ω
L
(
p
,
ω
i
)
n
⋅
ω
i
d
w
i
L(p,w_o)=\int_{\Omega}L(p,\omega_i)n\cdot\omega_idw_i
L(p,wo)=∫ΩL(p,ωi)n⋅ωidwi
- Ω \Omega Ω为半球空间,入射光方向 w i w_i wi,观察方向 w o w_o wo,着色点 p p p, n n n 为着色点 p p p 的法线。
进行替换
{
l
i
g
h
t
(
w
)
=
L
(
p
,
w
)
t
(
w
)
=
n
⋅
w
\left.\left\{light(w)=L(p,w)t(w)=n⋅w\right.\right.
{light(w)=L(p,w)t(w)=n⋅w
进行球谐函数展开
{
l
i
g
h
t
(
w
)
=
∑
i
=
0
L
i
Y
i
(
w
)
t
(
w
)
=
∑
i
=
0
t
i
Y
i
(
w
)
\left.\left\{light(w)=∑i=0LiYi(w)t(w)=∑i=0tiYi(w)\right.\right.
⎩
⎨
⎧light(w)=i=0∑LiYi(w)t(w)=i=0∑tiYi(w)
带回光照函数模型化简
L
(
p
,
w
o
)
=
∑
i
=
0
L
i
t
i
L(p,w_o)=\sum_{i=0}L_it_i
L(p,wo)=i=0∑Liti
此时形式简单,但是实际上计算时,需要预计算
t
i
t_i
ti,即对每一组法线方向都要计算一组球谐函数得到其系数,实际开销较大。于是利用球谐函数旋转不变性的性质继续推导得到
L
(
n
)
=
∑
l
=
0
∞
∑
m
=
−
l
l
4
π
2
l
+
1
L
l
m
t
l
Y
l
m
(
n
)
L(n)=\sum_{l=0}^\infty\sum_{m=-l}^l\sqrt{\frac{4\pi}{2l+1}}L_l^mt_lY_l^m(n)
L(n)=l=0∑∞m=−l∑l2l+14π
LlmtlYlm(n)
此时只需要通过顶点着色器传入的法向量n计算出球谐函数
Y
l
m
(
n
)
Y_l^m(n)
Ylm(n),再与常数相乘,不需按原来要对每个t都单独通过积分求解。
![[21] Opencv_CUDA应用之使用Haar级联的对象检测](https://img-blog.csdnimg.cn/direct/71456f2d3221469386636223c85a4d45.png?x-oss-process=image/resize,m_fixed,h_300,image/format,png)

