
热门标签
热门文章
- 1在 M1/M2 Mac 上,让 Windows 11 免费“跑”起来!_mac m2 win11arm usb
- 2业务中台构建策略:划分子域、上下文、事件风暴、需求结构化和能力可配置...
- 3移动端开发--物理像素和逻辑像素_在javascript中,可以使用window.devicepixelratio属性来获取设备的像素
- 4基于Web旅游网站的设计与实现 毕业设计开题报告_web前端旅游网站的课题介绍
- 5无序数组中找到左侧比他小右侧比他大的数_无序数组中寻找一个数,左值比它小,右值比它大
- 6设计模式之工厂模式_设计模式工厂模式
- 7Bytecode Outline plugin 一个很有用的eclipse插件
- 8端口映射和端口转发的区别(一个菜比的理解)_端口转发和端口映射的区别
- 9Python读写csv文件_csv.reader
- 10交易系统开发(四)——交易柜台系统
当前位置: article > 正文
Autoware-激光雷达目标检测与跟踪_基于传统方法的激光雷达目标检测
作者:从前慢现在也慢 | 2024-03-17 17:45:12
赞
踩
基于传统方法的激光雷达目标检测
记录一下自己常用的检测方法
----------------------------------------------
2022.9.9更新
突然发现没发跟踪部分,对原博再修改一下
完结撒花
-------------------------------------------------------
一、传统方法
使用
特别要注意:输入的topic
1.播放数据包:雷达的topic必须为/points_raw
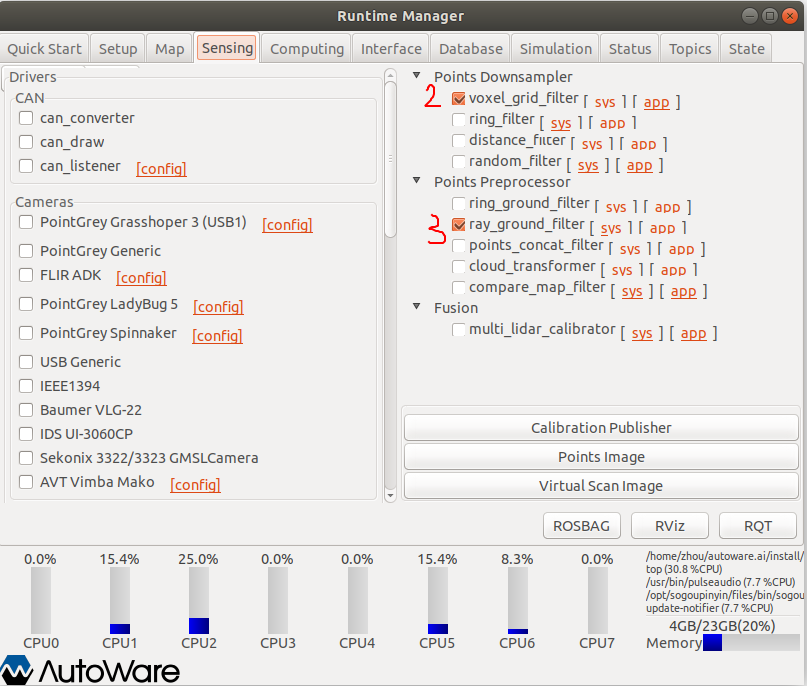
2.voxel_grid_filter:对原始点云进行降采样
3.ray_ground_filter:对降采样后的点云进行点云地面过滤,将地面点和非地面点进行分离
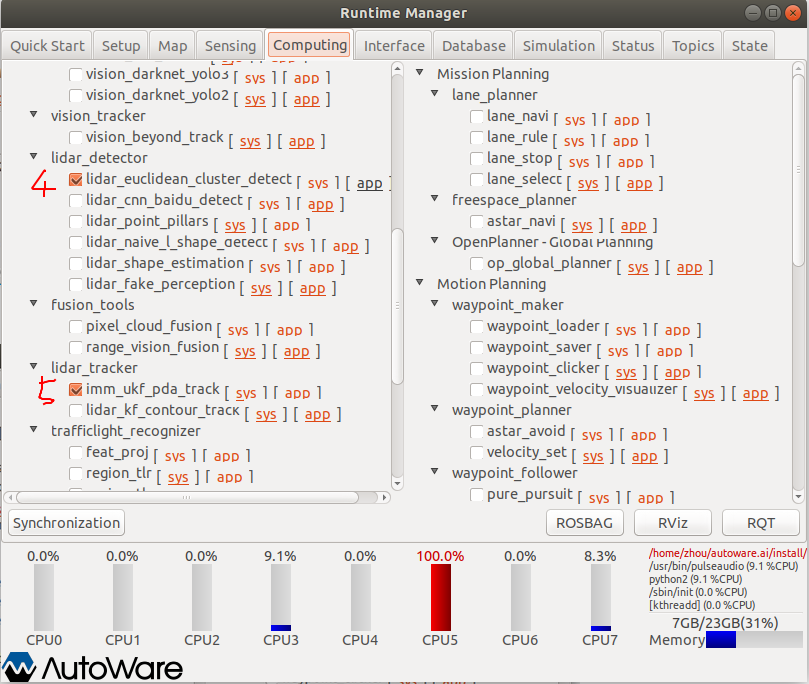
4.lidar_euclidean_cluster_detect:对非地面点进行聚类
5.imm_ukf_pda_track:基于交互式多模型、无迹卡尔曼滤波、概率数据关联的跟踪算法
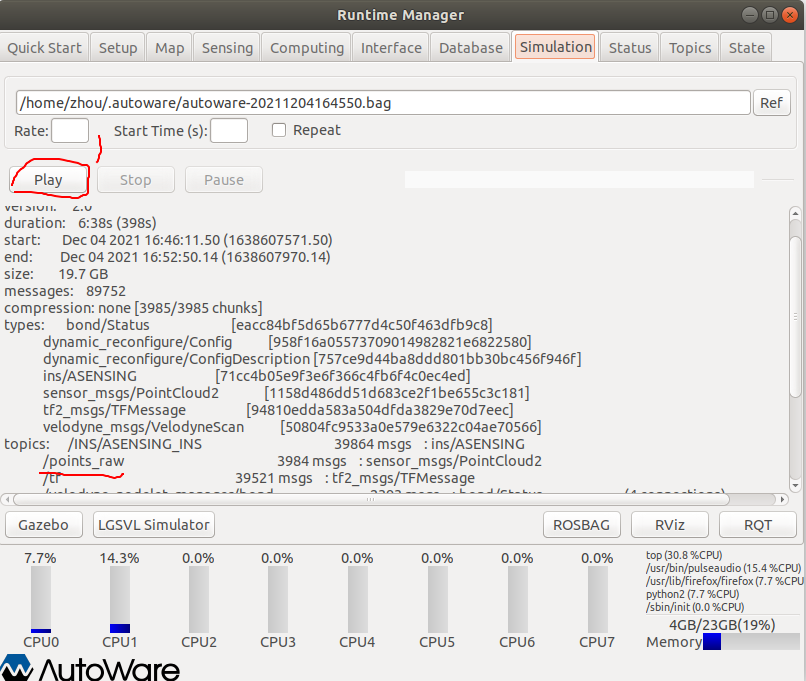
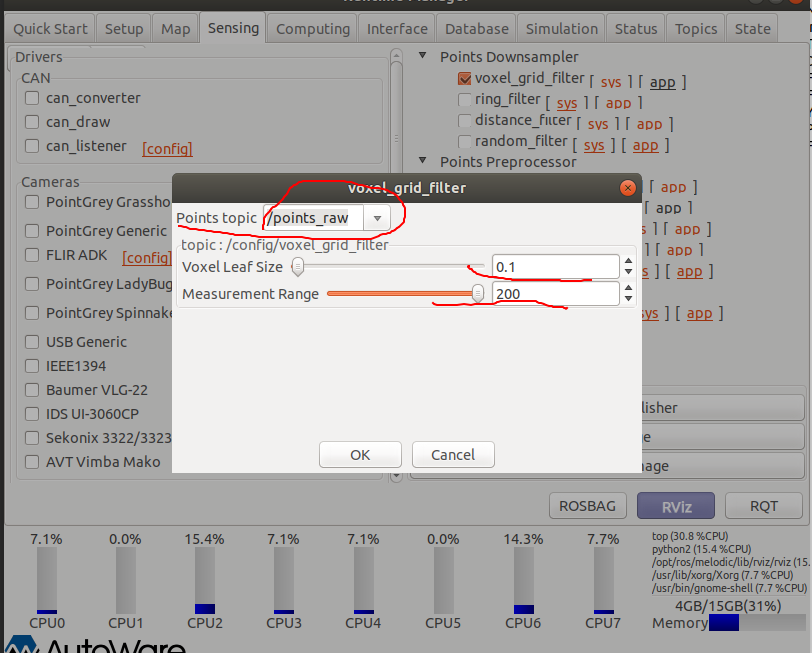
voxel_grid_filter
Points topic:输入点云话题,选择/points_raw
Voxel Leaf Size:滤波时创建的体素大小为0.1m的立方体。过大的Leaf Size虽然会使速度变快,但聚类的结果会相对变差,尤其是对于反射较为微弱的物体(如远处的行人)
Measurement Range:滤波范围
ray_ground_filter
input_point_topic:输入点云话题,选择voxel_grid_filter发布的/filtered_points
sensor_height:激光雷达高度
clipping_height:裁剪高度,例如裁剪1.28m以上部分(以雷达为原点)
min_point_distance:最近的点云距离,1.85代表过滤掉1.85m范围内的点云,为了消除车身自身的雷达反射的影响
推荐阅读
相关标签

