
- 1Kotlin非常用关键字使用记录
- 2在外包干了两年的点点点,人快废了。。。
- 3卷积神经网络第四周作业2: Art Generation with Neural Style Transfer - v1_all images in the fold named “image” are needed to
- 4Spring Cloud Gateway_springcloud gateway
- 5LLM - 大语言模型的指令微调(Instruction Tuning) 概述
- 6HTML CSS 弹性布局的总结
- 7Jenkins+Unity +git 自动化构建_unity 自动化工具
- 8抓取动态网页的数据的具体操作方法_动态加载的网页怎么获取链接
- 9Java:比较版本号_java version比较
- 10信息收集工具(kali 和 etc)_thcping6
四足综述(二)一个四足机器人系统都由些什么组成?
赞
踩
欢迎关注微信公众号 “四足机器人研习社”,本公众号的文章和资料和四足机器人相关,包括行业的经典教材、行业资料手册,同时会涉及到职业知识学习及思考、行业发展、学习方法等一些方面的文章。
目录
人类常常面临着我是谁,从哪里来,到哪里去,三个哲学问题
机器人也不例外。为了知道我是谁(自身状态估计),需要定位,为了搞清楚自己从哪里来,需要感知,为了解决到哪儿去,决策规划,怎么去,涉及到执行和控制了。因此一个四足机器人应该包含有如下几个部分:
-
机械结构
-
感知定位
-
决策规划
-
控制
-
执行
0.机械结构
四足机器人由四条腿和一个躯干组成。其结构设计围绕腿部与躯干进行。传统四足机器人的躯干为一块刚体。其设计主要围绕其腿部进行。四足机器人腿部需要至少3个自由度, 以完成在空间内的自由摆动,因而其腿部机构主要采用3R串联机构。虽然四足机器人腿部的机构形式趋同,但存在不同的配置方式,对应于不同的仿生形态。
从仿生角度,传统四足机器人腿部配置方式主要分成两大类,一类是哺乳动物式结构,另一类是爬行动物式结构。大体型四足机器人一般采取哺乳动物式结构。该结构中,机器人腿部第一个关节轴线与躯干的纵向方向平行,此关节作为髋关节,用于实现腿部的侧向迈跨。其余关节轴线与髋关节轴线垂直,同时平行于躯干横向方向,用于实现腿部的弯曲和伸展。。
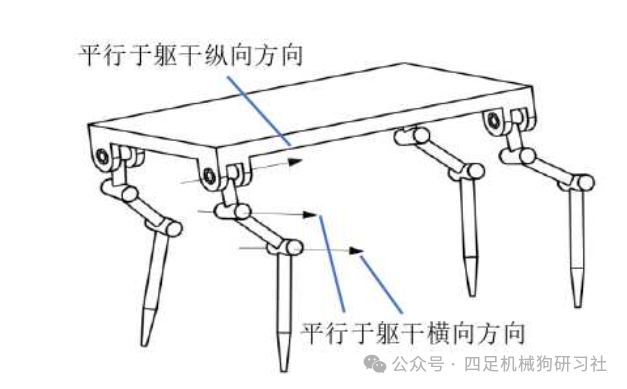
哺乳动物式结构
哺乳动物式四足机器人,一般较为高大,适用于大中型四足机器人。其竖直方向上腿部工作空间较大,能够跨越比较高的障碍。能够实现跳跃式奔跑,其行动速度较快。由于重心较高,其稳定性较差,需要配备复杂的传感与控制系统以维持其稳定地行走和奔跑。
爬行动物式四足机器人结构较为简单。其髋关节轴线与躯干所在平面垂直用于实现腿部的摆动。腿部其余关节轴线与髋关节轴线垂直,且与躯干所在平面平行,用于实现腿部的弯曲和伸展。如图2所示。爬行动物式四足机器人,般比较矮小,适用于中小型四足机器人。其竖直方向上腿部工作空间较小。相较哺乳动物式四足机器人,其越障能力较差、运行速度较慢。但其重心较低,足端围成的支撑多边形面积较大,因而具备更强的稳定性。
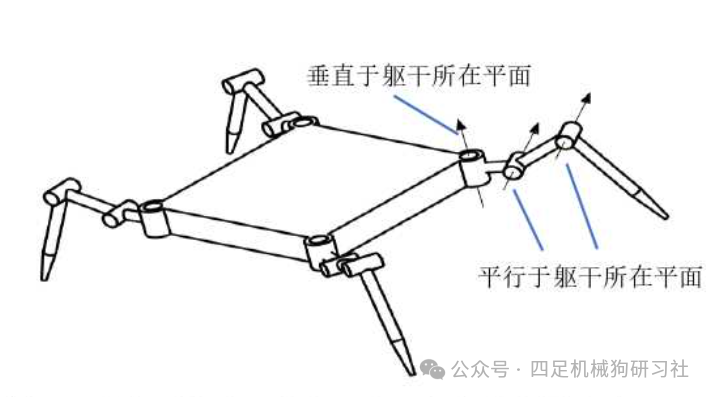
爬行动物式结构
哺乳动物式四足机器人的腿部配置方式有四种:全膝式、全肘式、前肘后膝式和前膝后肘式
前膝后肘式构型多用于对于速度要求不高的大负载型四足机器人。
前肘后膝式构型多见于对运动速度要求不高,但对越障能力要求高,需要精准规划落足点的四足机器人上。
全膝式或全肘式布局通常应用于高速四足机器人,这种构型具有简单的结构和高可靠性。
|
|
|
|
|
| (a) 前肘后膝式 | (b) 前膝后肘式 | (c) 全肘式 | (d) 全膝式 |




四种配置类型
对于腿部自由度配置:最基础的是二自由度腿,分别是一个髋关节摆动自由度和膝关节自由度,一般小型机器狗常用这种配置以降低成本。而更常见的是三自由度腿,髋部还有一个外展的自由度,不过一个自由度运动范围较小,在四足动物中,其正常行走时这个自由度往往也不大。
为了进一步挖掘四足的潜力,有的四足腿部配有轮足,甚至还加了一个踝关节的自由度,单腿共五个自由度。轮腿的引入使四足机器人更加灵巧,但也提高了其控制难度。

ANYmal轮足机器人
对于身体,在实际四足动物中,几乎所有的动物身体是可以通过扭转来调节身体状态的,因而有的仿生足式机器人会加上一到两个躯干自由度。近年来,部分学者开发了具备简单运动形式的可动躯干。此类可动躯干一般分为两种类型。一种在躯干中加入被动关节,一种在躯干中加入柔性关节。
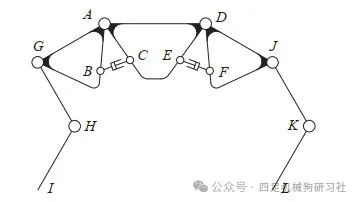
仿生猎豹躯干加入了两个关节
此外,为了使机器人在复杂环境中也能更好的平衡,有的还给机器人装上了二自由度的尾巴,该尾巴如一个倒立摆,额外引入了两自由度尾巴,通过控制尾巴质量快的位置,将机器人本体质心“拉回”支撑点多边形内,提高机器人在崎岖地形通过时的稳定性
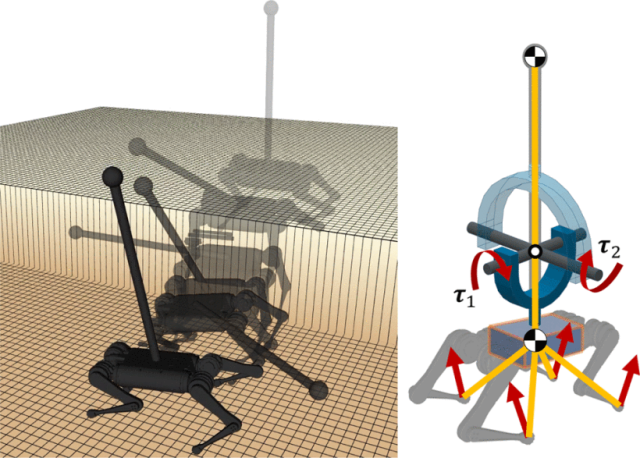
带尾巴的四足机器人
1.感知定位
与一般的机械臂、移动机器人类似,四足机器人的传感器分为内部传感器和外部传感器。内部传感器如IMU和关节电机编码器。IMU安装在四足机器人基座上,一般的六轴IMU包含三轴的陀螺仪和三轴加速度计,可以直接得到机器人本体的角速度和加速度,通过积分间接得到机器人本体的速度、位置及姿态角度。然而积分不可避免存在累计误差,导致定位的漂移,为了更准确的估计机器人的状态,人们引入了多传感器融合:IMU的陀螺仪和加速度计可以融合,IMU和机器人关节编码器通过运动学解算出的结果融合,关于这部分内容·后续文章会详细介绍。
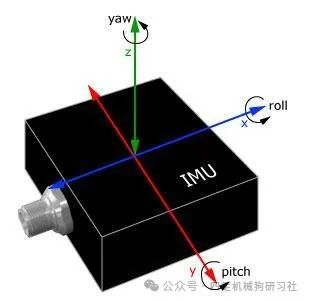
IMU
外部传感器包括激光雷达、相机、足端压力传感器等。激光雷达分为固态激光雷达和机械式激光雷达。固态激光雷达也称面阵激光雷达,可以在发射一定范围内的面阵激光,机械式激光雷达则通过不断地旋转来扩大覆盖面积,其线数越多,扫描越精确,价格也越高。激光雷达通过发射激光照射到物体表面再反射回来计算其与物体的距离,由于扫描的点都是实点,所以定位精度很高,价格也高,往往达到万元级别。与之相比,相机的价格就便宜多了,几百元、千元级别就可满足其大部分需求。

激光雷达

双目相机
2.决策规划
决策往往采用有限状态机。机器人需要从有限个不同状态之间切换.
机器人的运行过程中需要经常在各个状态之间切换,如机器人匍待命时的阻尼模式起身时的固定站立模式、运动时的行走模式等。为了让各个状态之间可以顺畅切换,没有互相干扰,以及方便增删状态,在设计机器人控制系统时往往使用有限状态机。
有限状态机并不是一个真实硬件,而是一种抽象的概念。下图为一个状态机切换关系图例子,该图以箭头的形式表明了不同状态之间所允许的切换关 系。例如,起立之后可以下蹲,下蹲之后也可以起立,但是下蹲后不能行走。图中虚线 框起来的五个状态,都是控制系统有明确控制信号的状态。当机器人处于虚线框中的状 态时,状态机中存在危险检测机制,检测到危险时状态机自动调度到阻尼保护状态,随 后可手动切换到电机掉电状态或者关闭机器人电源。
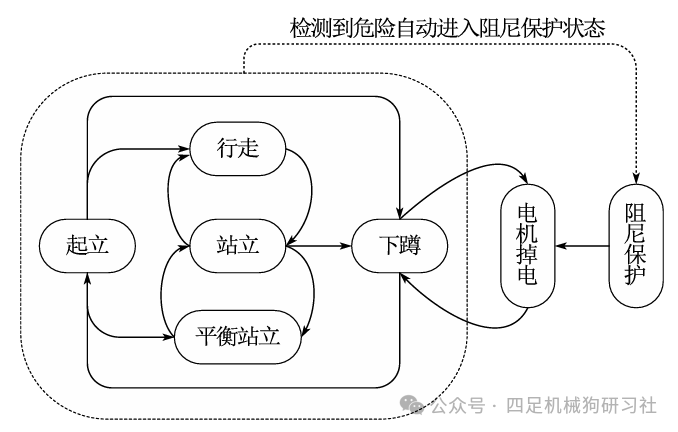
有限状态机
规划分为身体规划和足端步态规划。身体规划和一般的移动机器人路径规划一致,基于图搜索的路径规划有迪杰斯特拉算法,A*算法等,基于概率的概率图搜索,RRT算法等,基于群智能的蚁群,粒子群,遗传算法等。
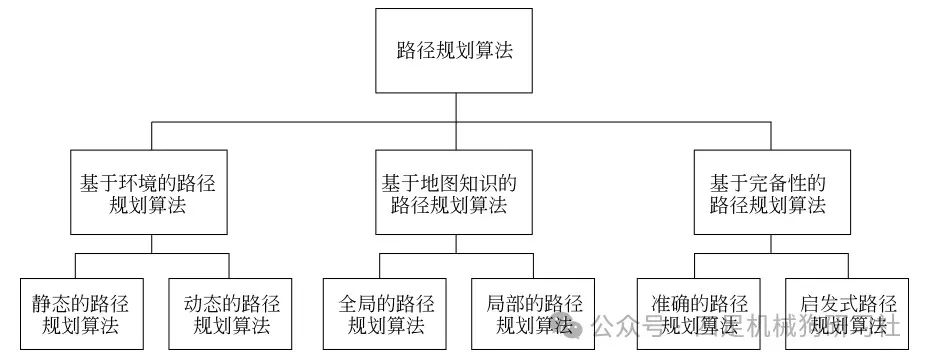
身体路径规划
步态规划有摆动腿的落足点规划,摆动腿轨迹规划,及各腿之间的步态模式。
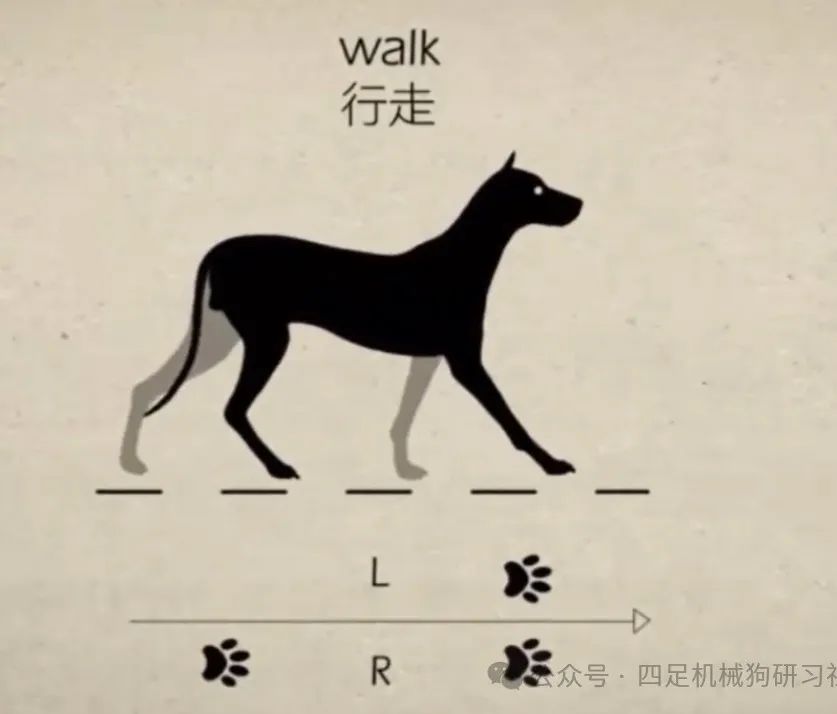
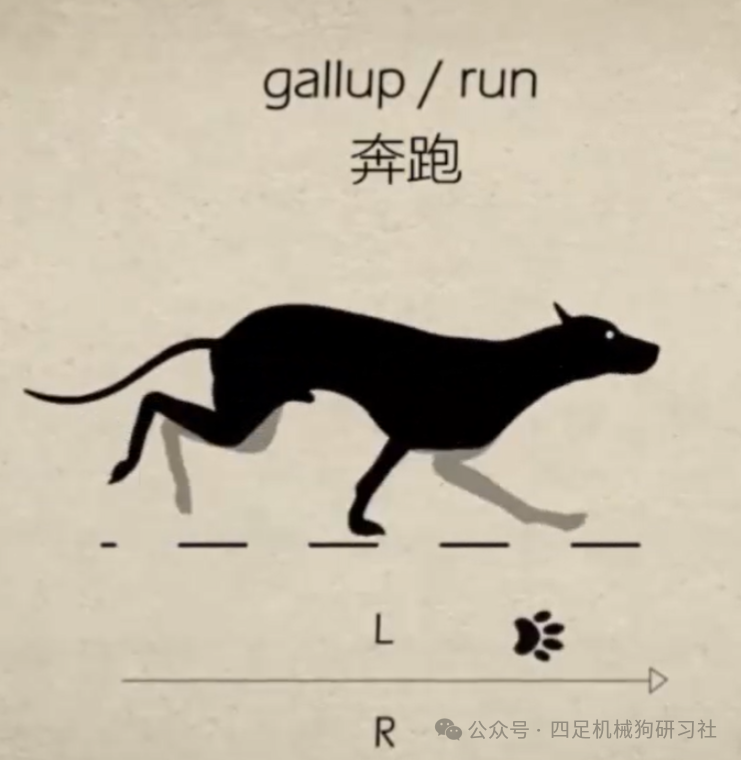
根据机器人运动时站立腿和支撑腿的运动顺序和步态周期里时间占比分为不同步态,如对角小跑tort步态,walk,pace,gallop
步态模式包含各腿的相对运动关系和一个步态周期内各腿摆动时间和站立时间的比值(称为占空比)常见的步态模式如WALK步态,TORT步态,GALOP步态,PACE步态等
WALK步态也叫散步,每次只抬一条腿,任意时刻至少三条腿处于支撑相,WALK步态支撑腿围成的面积大,稳定裕度高,是一种准静态的步态模式。
TORT步态也叫对角小跑,每次同时抬对角的两条腿,Trot步态是一种动态步态,适用于中低速跑动,并且具有比较大的运动速度范围,另一个重要特征是在中等速度下的Trot步态具有最高的能量效率。这些优点使得Trot步态成为最常用的四足步态。


规划的轨迹以机器人髋部坐标系 为参考,包括了 3 个关键要素:起点坐标 、期望落脚点坐标 和抬腿高度 。其中,起点可以根据抬腿瞬时的关节角度通过正运动学 求解得到,抬腿高度可根据地形设置为常数(也可利用一定的控制策略来实现抬腿 高度的自我调整)。摆动轨迹的期望落脚点坐标直接决定了步幅的大小,对机器人的运动速度和 地形适应能力有重要的影响。
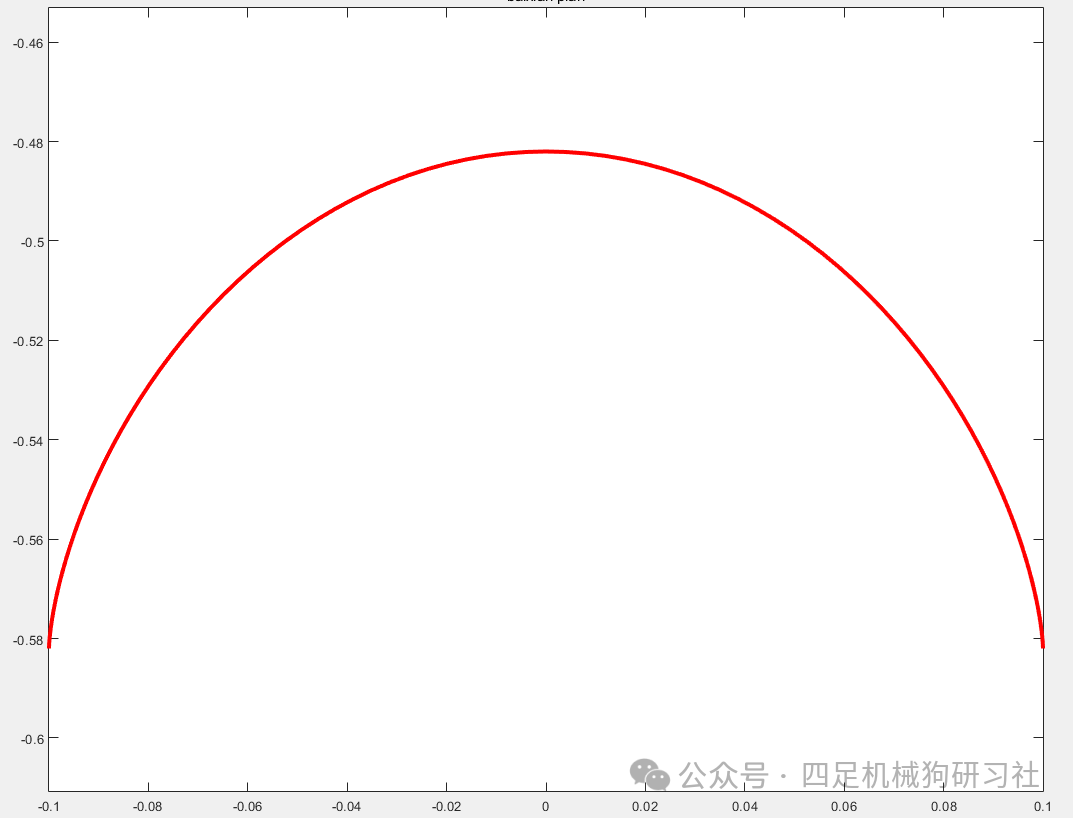
摆线规划
3.控制
由 于 四 足 机 器 人 具 有 典 型 的 浮 动 机 身,且 存 在 不 连 续 足-地 交 互 问 题,因 而 导 致 四 足 机 器 人 动 力 学 存 在 典型的欠驱动不适定问题。特别地,对于液压四足机器人而 言,其存在较强的非线性,关节驱动自由度采用曲柄摇块机构,增加了结构的 复杂性,并与串联树状结构的多刚体动力学模型间存在较大的模型误差。基 于 制 约 足 式 机 器 人 力 控 算 法 进 一 步 发 展 的 两 个 共 性 问 题 ——高 维 度 和 强非线性。
控制系统的硬件,简单的四足可以用一片板子作为其“大脑”,如STM32单片机,esp32等,稍稍复杂一些往往需要加上上位机,如树莓派,英伟达JETSON NANO,工控机等。常常用STM32作为运动控制解算,而外部传感器如激光雷达、相机等和上层的决策规划、控制则在计算资源相对丰富的上位机进行。
软件部分,由于四足机器人是高度冗余的系统,结构的复杂性给控制带来较大的难度,基于无模型的VMC控制,类似于笛卡尔空间的PD控制,不涉及四足机器人的运动学和动力学逆解,只需要计算雅可比矩阵,便可通过力雅可比矩阵将工作空间的力映射到关节空间,从而获得关节期望力矩并下发给各个关节电机。当然,由于四足的冗余特性,其解并不唯一,因此要么需要舍弃一部分自由度的控制器,要么求一个优化问题;
为 实 现 在 线 优 化算法在高维复杂机器人应用的普适性与通用性,足式机器人学界常采用系统 降维的方案。为了抽象足式机器人的运动“本质”。可将机器人质量集中 于一点,复杂的足-地交互力简化为环境作用于ZMP点的合力,质心与足端通过 无 质 量 杆 连 接,最 终 将 足 式 机 器 人 简 化 为 点-质 量 模 型,也 称 为 一 般 倒 立 摆 模 型。该 领 域 普 遍 采 用 的 简 化 模 型 均 以 点-质 量 模 型 为 基 础 衍 化 而 来。
基于简化模型的倒立摆控制,忽略腿部惯性对机器人的影响,将机器人模型简化为一个弹簧倒立摆,更进一步的,将非线性的弹簧倒立摆简化成线性倒立摆,其动力学模型不仅是线性的,而且基于正交方向的运动解耦特性,因此在 足式机器人运动规划及控制领域应用广泛
以上的控制只考虑当下状态,而并没有考虑到当前对未来状态的影响。
由于落足点的非连续支撑特性,模型 始终处于动态稳定过程中,即前一时刻的机器人运动状态必将显著的影响机器 人 的 后 续 稳 定 运 动 空 间。近 年 来 随 着 预 测 控 制 优 化 理 论 的 发 展 与 普 及,足 式 机 器人领域因此致力于将更长时间跨度的预测控制算法用于运动规划中,以使当 前时刻所规划的运动轨迹能综合考虑未来一步甚至几步内的运动稳定性。模型预测控制MPC,将机器人简化为一个单 刚体模型,建立动力学离散方程,然后求出能让单刚体机器人系统在一段时间保 持稳定的力。模型预测控制与传统控制算法需要证明稳定性不同,是一种最优控 制算法,于 2000 年证明能让机器人系统在预测水平周期内保持稳定[9]。模型预测 控制能让机器人系统状态在一段时间内与期望状态之间的误差最小,这让算法有 了一定的预测性,即算出
[详细] -->赞
踩
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

