- 1机器学习中的模型评价策略metric(ROC,PR,AUC,F1)_auc metric
- 2深入浅出 -- 系统架构之负载均衡Nginx缓冲区
- 3手把手教你激活FL Studio 21.2.2.3914中文破解版2024年图文激活教程以及如何设置中文language_fl studio(水果音乐编曲软件 )v21.2.2.3914 中文免费版(附中文设置教程)
- 4美食推荐系统的设计与实现(论文+源码)_kaic_美食圈系统设计实现思路
- 5mysql大量查询导致锁表_mysql数据库大规模数据读写并行时导致的锁表问题
- 6Qt 之 QSS(Q_PROPERTY-自定义属性)_qt qss属性选择
- 7字节AL LAB nlp 日常实习面试失败_bert bilstm globalpointer
- 8iOS 审核被拒问题_we need additional time to evaluate your submissio
- 9ChatGPT技术基石之Transformer技术的简介(简单易懂)_chatgpt的基础——transformer模型简介
- 10图解强化学习 原理 超详解 (一)_强化学习 图
深度学习——DatadLoader的使用_data.dataloader
赞
踩
一、DataLoader简介#
官网地址:
1. DataLoder类#
Copy
class torch.utils.data.DataLoader(dataset, batch_size=1, shuffle=None, sampler=None, batch_sampler=None, num_workers=0, collate_fn=None, pin_memory=False, drop_last=False, timeout=0, worker_init_fn=None, multiprocessing_context=None, generator=None, *, prefetch_factor=None, persistent_workers=False, pin_memory_device='')
由此可见,DataLoder必须需要输入的参数只有�������。
2. 参数说明#
-
dataset(Dataset): 数据集的储存的路径位置等信息
-
batch_size(int): 每次取数据的数量,比如batchi_size=2,那么每次取2条数据
-
shuffle(bool): True: 打乱数据(可以理解为打牌中洗牌的过程); False: 不打乱。默认为False
-
num_workers(int): 加载数据的进程,多进程会更快。默认为0,即用主进程进行加载。但在windows系统下,num_workers如果非0,可能会出现 BrokenPipeError[Error 32] 错误
-
drop_last(bool): 比如我们从100条数据中每次取3条,到最后会余下1条,如果drop_last=True,那么这条数据会被舍弃(即只要前面99条数据);如果为False,则保留这条数据
二、DataLoader实操#
- 数据集仍然采用上一篇的CIFAR10数据集
1. DataLoader取数据的逻辑#
-
首先import dataset,dataset会返回一个数据的img和target
-
然后import dataloder,并设置����ℎ_����,比如����ℎ_����=4,那么dataloder会获取这些数据:dataset[0]=img0, target0; dataset[1]=img1, target1; dataset[2]=img2, target2; dataset[3]=img3, target3. 并分别将其中的4个img和4个target进行打包,并返回打包好的imgs和targets
比如下面这串代码:
Copy
import torchvision from torch.utils.data import DataLoader #测试集,并将PIL数据转化为tensor类型 test_data=torchvision.datasets.CIFAR10("./dataset",train=False,transform=torchvision.transforms.ToTensor()) #batch_size=4:每次从test_data中取4个数据集并打包 test_loader=DataLoader(dataset=test_data, batch_size=4, shuffle=True, num_workers=0, drop_last=False)
这里的test_loader会取出test_data[0]、test_data[1]、test_data[2]、test_data[3]的img和target,并分别打包。返回两个参数:打包好的imgs,打包好的taregts
2. 如何取出DataLoader中打包好的img、target数据#
(1)输出打包好的img、target#
代码示例如下:
Copy
import torchvision from torch.utils.data import DataLoader #测试集,并将PIL数据转化为tensor类型 test_data=torchvision.datasets.CIFAR10("./dataset",train=False,transform=torchvision.transforms.ToTensor()) #batch_size=4:每次从test_data中取4个数据集并打包 test_loader=DataLoader(dataset=test_data, batch_size=4, shuffle=True, num_workers=0, drop_last=False) #测试数据集中第一章图片及target img, target=test_data[0] print(img.shape) print(target) #取出test_loader中的图片 for data in test_loader: imgs,targets = data print(imgs.shape) #[Run] torch.Size([4, 3, 32, 32]) 4张图片打包,3通道,32×32 print(targets) #[Run] tensor([3, 5, 2, 7]) 4张图,每张图片对应的标签分别是3,5,2,7(某一次print的举例,每次print结果不太一样)
在11行处debug一下可以发现,test_loader中有个叫sampler的采样器,采取的是随机采样的方式,也就是说这batch_size=4时,每次抓取的4张图片都是随机抓取的。
(2)展示图片#
用tensorboard就可以可视化了,具体操作改一下上面代码最后的for循环就好了
Copy
from torch.utils.tensorboard import SummaryWriter writer=SummaryWriter("dataloder") step=0 #tensorboard步长参数 for data in test_loader: imgs,targets = data # print(imgs.shape) #[Run] torch.Size([4, 3, 32, 32]) 4张图片打包,3通道,32×32 # print(targets) #[Run] tensor([3, 5, 2, 7]) 4张图,每张图片对应的标签分别是3,5,2,7(某一次print的举例,每次print结果不太一样) writer.add_images("test_data",imgs,step) #注意这里是add_images,不是add_image。因为这里是加入了64张图 step=step+1 writer.close()
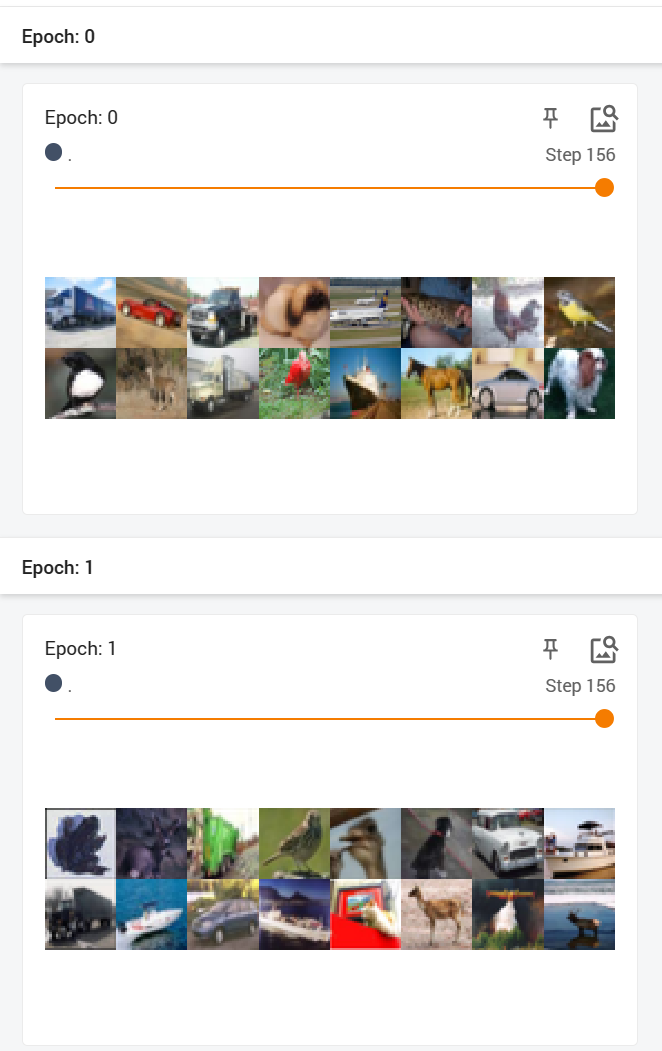
(3)关于shuffle的理解#
- 可以理解为一个for循环就是打一次牌,打完一轮牌后,若shuffle=False,那么下一轮每一步抓到的牌都会跟上一轮相同;如果shuffle=True,那么就会进行洗牌,打乱牌的顺序后,下一轮每一步跟上一轮的会有不同。
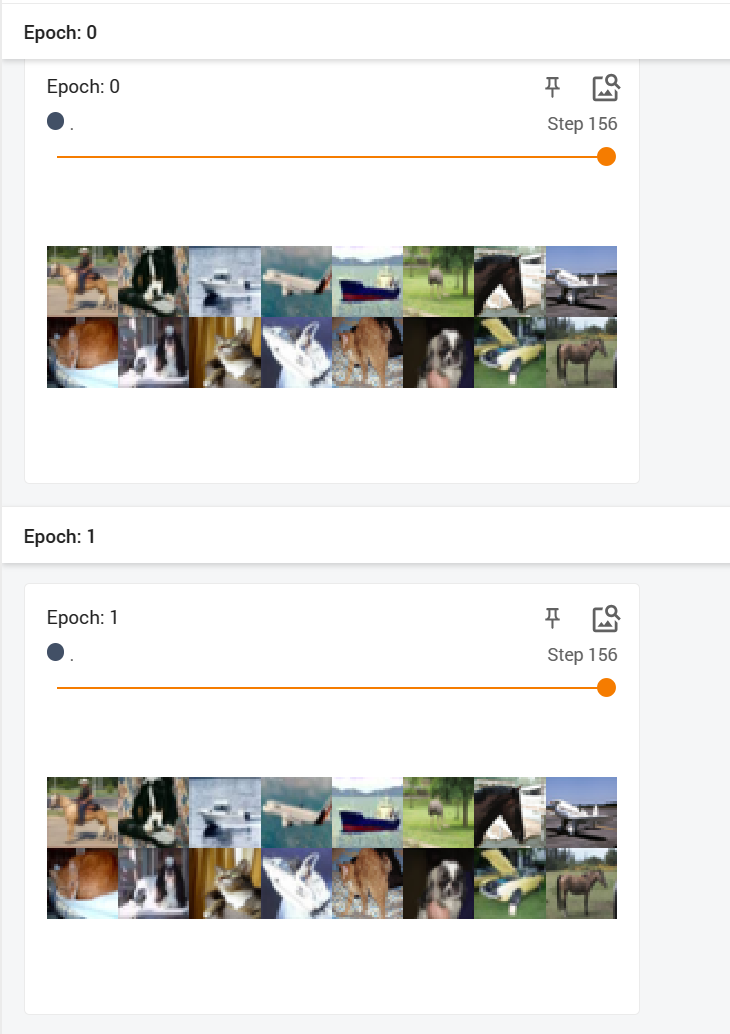
首先将shuffle设置为False:
Copy
test_loader=DataLoader(dataset=test_data, batch_size=64, shuffle=True, num_workers=0, drop_last=False)
然后对(2)的代码进行修改,运行代码:
Copy
for epoch in range(2): #假设打两次牌,我们来观察两次牌中间的洗牌情况 step = 0 # tensorboard步长参数 for data in test_loader: imgs,targets = data # print(imgs.shape) #[Run] torch.Size([4, 3, 32, 32]) 4张图片打包,3通道,32×32 # print(targets) #[Run] tensor([3, 5, 2, 7]) 4张图,每张图片对应的标签分别是3,5,2,7(某一次print的举例,每次print结果不太一样) writer.add_images("Epoch: {}".format(epoch),imgs,step) #注意这里是add_images,不是add_image。因为这里是加入了64张图 step=step+1 writer.close()
结果显示,未洗牌时运行的结果是一样的:
- 将shuffle设置为True,再次运行,可以发现两次结果还是不一样的: