
热门标签
热门文章
- 1面试题篇-13-Kafka相关面试题_kafka面试
- 2深度之眼Paper带读笔记GNN.05.TransE/H/R/D_transe gnn
- 3Google 研究人员提出防止机器人造反的方法
- 4java程序设计_知到智慧树Java面向对象程序设计搜题公众号
- 5HTTP与HTTPS 对比,区别详解(2024-04-25)
- 6Oracle关于时间/日期的操作
- 7【AI视觉】智能送药小车——1.复盘及核心代码_智能送药小车代码
- 8Markdown富文本编辑器使用方式_dw的代码如何写入富文本
- 9无人驾驶汽车入门_无人驾驶汽车将如何扭转10,000年的趋势
- 10python编程<八>_编程输出2020-2100年中所有的闰年
当前位置: article > 正文
myCobot pro 机械臂(6)逆向运动学_机械臂逆运动学
作者:从前慢现在也慢 | 2024-05-04 16:46:14
赞
踩
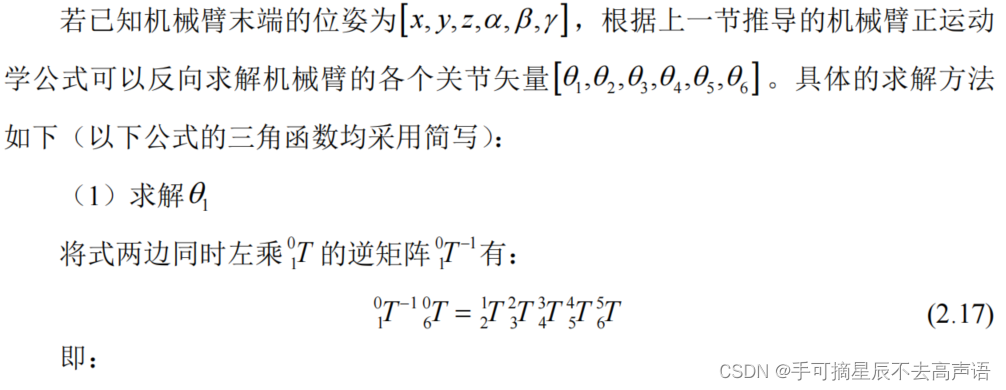
机械臂逆运动学
机械臂逆运动学求解常用的方法有几何法、解析法、数值法
从求解的方式和计算的效率上来看,几何法和解析法会考虑机械臂结构不同而造成的差异,因此对于不同结构的机械臂会有特定的求解方式。
通常来说,这两种方法具有速度快、精度高的优点和通用性差、普适性低的缺点。而数值法则通常有相对统一的求解方式,具有适用性好但速度慢、数值稳定性差的特点。
对于工业机器人而言,通常处于特定的工作环境中,为了满足一定的工作性能要求而常采用解析法进行求解。
本文将使用解析法对该型机械臂进行逆运动学的求解。





下面通过Python代码的形式将这些推导的公式表示出来:
- # 输入位姿矩阵T
- # 例如:T=np.matrix(np.array([[0.5,-0.7,-0.3,36],[-0.3,-0.6,0.6,-28.3],[-0.7,-0.2,-0.6,355.7],[0,0,0,1]]))
-
- # 输出解的列表q_list,里面的一个列表就代表一组解
- # 例如:q_list=[[q1_1,q21,……],[],[],……]
-
- def ikine_6DOF(T):
- # 提取元素
- nx = T[0, 0]
- ny = T[1, 0]
- nz = T[2, 0]
- ox = T[0, 1]
- oy = T[1, 1]
- oz = T[2, 1]
- ax = T[0, 2]
- ay = T[1, 2]
- az = T[2, 2]
- px = T[0, 3]
- py = T[1, 3]
- pz = T[2, 3]
-
- # 求解q1
- # 见论文公式(2.23)
- q1_1 = 2 * np.arctan2(px - ax * d6 + np.sqrt((px - ax * d6) ** 2 + (-py + ay * d6) ** 2 - d4 ** 2),
- d4 - py + ay * d6)
- print(q1_1)
- if q1_1 < q1_range[0] or q1_1 > q1_range[1]:
- q1_1 = False
- q1_2 = 2 * np.arctan2(px - ax * d6 - np.sqrt((px - ax * d6) ** 2 + (-py + ay * d6) ** 2 - d4 ** 2),
- d4 - py + ay * d6)
- if q1_2 < q1_range[0] or q1_2 > q1_range[1]:
- q1_2 = False
-
- # 求解q6
- # 见论文公式(2.29)
- q6_1 = np.arctan2(ox * np.sin(q1_1) - oy * np.cos(q1_1), ny * np.cos(q1_1) - nx * np.sin(q1_1)) + np.pi
- q6_2 = np.arctan2(ox * np.sin(q1_2) - oy * np.cos(q1_2), ny * np.cos(q1_2) - nx * np.sin(q1_2)) + np.pi
-
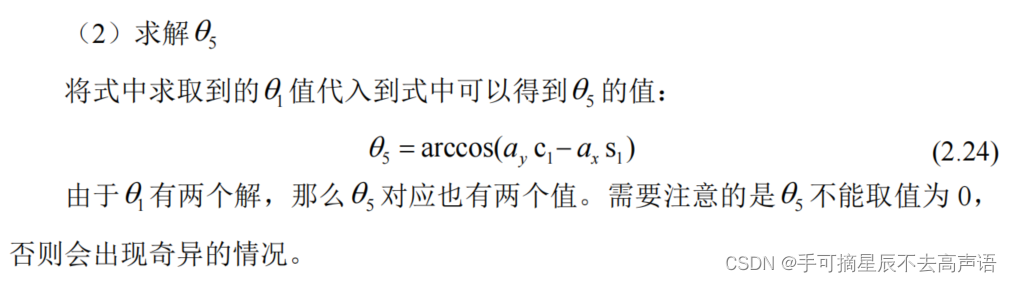
- # 求解q5
- # 见论文公式(2.24)
- if ay * np.cos(q1_1) - ax * np.sin(q1_1) > 1:
- q5_1 = False
- q5_2 = False
- else:
- q5_1 = np.arccos(ay * np.cos(q1_1) - ax * np.sin(q1_1))
- q5_2 = -q5_1
- if ay * np.cos(q1_2) - ax * np.sin(q1_2) > 1:
- q5_3 = False
- q5_4 = False
- else:
- q5_3 = np.arccos(ay * np.cos(q1_2) - ax * np.sin(q1_2))
- q5_4 = -q5_3
-
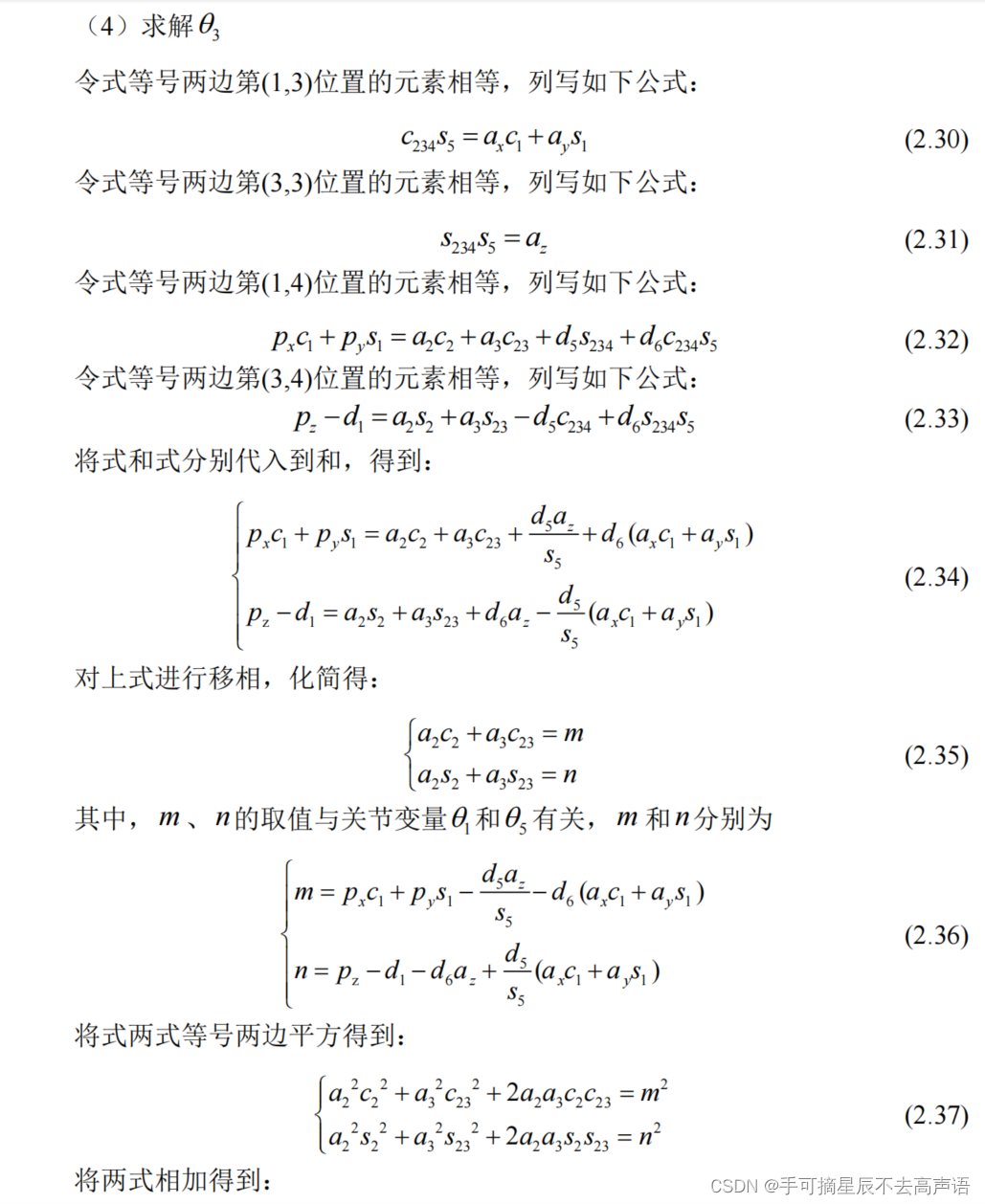
- # 求解q3
- # 见论文公式(2.40)
- # 如果arccos()中的值大于1,会出现nan的结果,报错:RuntimeWarning: invalid value encountered in arccos
- if q5_1 == 0:
- m1 = 10000
- else:
- m1 = px * np.cos(q1_1) + py * np.sin(q1_1) - d5 * az / np.sin(q5_1) - d6 * (
- ax * np.cos(q1_1) + ay * np.sin(q1_1))
- if q5_2 == 0:
- m2 = 10000
- else:
- m2 = px * np.cos(q1_1) + py * np.sin(q1_1) - d5 * az / np.sin(q5_2) - d6 * (
- ax * np.cos(q1_1) + ay * np.sin(q1_1))
- if q5_3 == 0:
- m3 = 10000
- else:
- m3 = px * np.cos(q1_2) + py * np.sin(q1_2) - d5 * az / np.sin(q5_3) - d6 * (
- ax * np.cos(q1_2) + ay * np.sin(q1_2))
- if q5_4 == 0:
- m4 = 10000
- else:
- m4 = px * np.cos(q1_2) + py * np.sin(q1_2) - d5 * az / np.sin(q5_4) - d6 * (
- ax * np.cos(q1_2) + ay * np.sin(q1_2))
- if q5_1 == 0:
- n1 = 10000
- else:
- n1 = pz - d1 - d6 * az + d5 / np.sin(q5_1) * (ax * np.cos(q1_1) + ay * np.sin(q1_1))
- if q5_2 == 0:
- n2 = 10000
- else:
- n2 = pz - d1 - d6 * az + d5 / np.sin(q5_2) * (ax * np.cos(q1_1) + ay * np.sin(q1_1))
- if q5_3 == 0:
- n3 = 10000
- else:
- n3 = pz - d1 - d6 * az + d5 / np.sin(q5_3) * (ax * np.cos(q1_2) + ay * np.sin(q1_2))
- if q5_4 == 0:
- n4 = 10000
- else:
- n4 = pz - d1 - d6 * az + d5 / np.sin(q5_4) * (ax * np.cos(q1_2) + ay * np.sin(q1_2))
-
- if (m1 ** 2 + n1 ** 2 - a2 ** 2 - a3 ** 2) / (2 * a2 * a3) > 1 or (m1 ** 2 + n1 ** 2 - a2 ** 2 - a3 ** 2) / (
- 2 * a2 * a3) < -1:
- q3_1 = False
- q3_2 = False
- else:
- q3_1 = np.arccos((m1 ** 2 + n1 ** 2 - a2 ** 2 - a3 ** 2) / (2 * a2 * a3))
- q3_2 = -q3_1
- if (m2 ** 2 + n2 ** 2 - a2 ** 2 - a3 ** 2) / (2 * a2 * a3) > 1 or (m2 ** 2 + n2 ** 2 - a2 ** 2 - a3 ** 2) / (
- 2 * a2 * a3) < -1:
- q3_3 = False
- q3_4 = False
- else:
- q3_3 = np.arccos((m2 ** 2 + n2 ** 2 - a2 ** 2 - a3 ** 2) / (2 * a2 * a3))
- q3_4 = -q3_3
- if (m3 ** 2 + n3 ** 2 - a2 ** 2 - a3 ** 2) / (2 * a2 * a3) > 1 or (m3 ** 2 + n3 ** 2 - a2 ** 2 - a3 ** 2) / (
- 2 * a2 * a3) < -1:
- q3_5 = False
- q3_6 = False
- else:
- q3_5 = np.arccos((m3 ** 2 + n3 ** 2 - a2 ** 2 - a3 ** 2) / (2 * a2 * a3))
- q3_6 = -q3_5
- if (m4 ** 2 + n4 ** 2 - a2 ** 2 - a3 ** 2) / (2 * a2 * a3) > 1 or (m4 ** 2 + n4 ** 2 - a2 ** 2 - a3 ** 2) / (
- 2 * a2 * a3) < -1:
- q3_7 = False
- q3_8 = False
- else:
- q3_7 = np.arccos((m4 ** 2 + n4 ** 2 - a2 ** 2 - a3 ** 2) / (2 * a2 * a3))
- q3_8 = -q3_7
-
- # 求解q2
- # 见论文公式(2.43)
- if not q3_1:
- q2_1 = False
- q2_2 = False
- else:
- q2_1 = 2 * np.arctan2(
- -a3 * np.sin(q3_1) + np.sqrt((-a3 * np.sin(q3_1)) ** 2 + (a2 + a3 * np.cos(q3_1)) ** 2 - m1 ** 2),
- a2 + a3 * np.cos(q3_1) + m1)
- q2_2 = 2 * np.arctan2(
- -a3 * np.sin(q3_1) - np.sqrt((-a3 * np.sin(q3_1)) ** 2 + (a2 + a3 * np.cos(q3_1)) ** 2 - m1 ** 2),
- a2 + a3 * np.cos(q3_1) + m1)
- if not q3_2:
- q2_3 = False
- q2_4 = False
- else:
- q2_3 = 2 * np.arctan2(
- -a3 * np.sin(q3_2) + np.sqrt((-a3 * np.sin(q3_2)) ** 2 + (a2 + a3 * np.cos(q3_2)) ** 2 - m1 ** 2),
- a2 + a3 * np.cos(q3_2) + m1)
- q2_4 = 2 * np.arctan2(
- -a3 * np.sin(q3_2) - np.sqrt((-a3 * np.sin(q3_2)) ** 2 + (a2 + a3 * np.cos(q3_2)) ** 2 - m1 ** 2),
- a2 + a3 * np.cos(q3_2) + m1)
- if not q3_3:
- q2_5 = False
- q2_6 = False
- else:
- q2_5 = 2 * np.arctan2(
- -a3 * np.sin(q3_3) + np.sqrt((-a3 * np.sin(q3_3)) ** 2 + (a2 + a3 * np.cos(q3_3)) ** 2 - m2 ** 2),
- a2 + a3 * np.cos(q3_3) + m2)
- q2_6 = 2 * np.arctan2(
- -a3 * np.sin(q3_3) - np.sqrt((-a3 * np.sin(q3_3)) ** 2 + (a2 + a3 * np.cos(q3_3)) ** 2 - m2 ** 2),
- a2 + a3 * np.cos(q3_3) + m2)
- if not q3_4:
- q2_7 = False
- q2_8 = False
- else:
- q2_7 = 2 * np.arctan2(
- -a3 * np.sin(q3_4) + np.sqrt((-a3 * np.sin(q3_4)) ** 2 + (a2 + a3 * np.cos(q3_4)) ** 2 - m2 ** 2),
- a2 + a3 * np.cos(q3_4) + m2)
- q2_8 = 2 * np.arctan2(
- -a3 * np.sin(q3_4) - np.sqrt((-a3 * np.sin(q3_4)) ** 2 + (a2 + a3 * np.cos(q3_4)) ** 2 - m2 ** 2),
- a2 + a3 * np.cos(q3_4) + m2)
- if not q3_5:
- q2_9 = False
- q2_10 = False
- else:
- q2_9 = 2 * np.arctan2(
- -a3 * np.sin(q3_5) + np.sqrt((-a3 * np.sin(q3_5)) ** 2 + (a2 + a3 * np.cos(q3_5)) ** 2 - m3 ** 2),
- a2 + a3 * np.cos(q3_5) + m3)
- q2_10 = 2 * np.arctan2(
- -a3 * np.sin(q3_5) - np.sqrt((-a3 * np.sin(q3_5)) ** 2 + (a2 + a3 * np.cos(q3_5)) ** 2 - m3 ** 2),
- a2 + a3 * np.cos(q3_5) + m3)
- if not q3_6:
- q2_11 = False
- q2_12 = False
- else:
- q2_11 = 2 * np.arctan2(
- -a3 * np.sin(q3_6) + np.sqrt((-a3 * np.sin(q3_6)) ** 2 + (a2 + a3 * np.cos(q3_6)) ** 2 - m3 ** 2),
- a2 + a3 * np.cos(q3_6) + m3)
- q2_12 = 2 * np.arctan2(
- -a3 * np.sin(q3_6) - np.sqrt((-a3 * np.sin(q3_6)) ** 2 + (a2 + a3 * np.cos(q3_6)) ** 2 - m3 ** 2),
- a2 + a3 * np.cos(q3_6) + m3)
- if not q3_7:
- q2_13 = False
- q2_14 = False
- else:
- q2_13 = 2 * np.arctan2(
- -a3 * np.sin(q3_7) + np.sqrt((-a3 * np.sin(q3_7)) ** 2 + (a2 + a3 * np.cos(q3_7)) ** 2 - m4 ** 2),
- a2 + a3 * np.cos(q3_7) + m4)
- q2_14 = 2 * np.arctan2(
- -a3 * np.sin(q3_7) - np.sqrt((-a3 * np.sin(q3_7)) ** 2 + (a2 + a3 * np.cos(q3_7)) ** 2 - m4 ** 2),
- a2 + a3 * np.cos(q3_7) + m4)
- if not q3_8:
- q2_15 = False
- q2_16 = False
- else:
- q2_15 = 2 * np.arctan2(
- -a3 * np.sin(q3_8) + np.sqrt((-a3 * np.sin(q3_8)) ** 2 + (a2 + a3 * np.cos(q3_8)) ** 2 - m4 ** 2),
- a2 + a3 * np.cos(q3_8) + m4)
- q2_16 = 2 * np.arctan2(
- -a3 * np.sin(q3_8) - np.sqrt((-a3 * np.sin(q3_8)) ** 2 + (a2 + a3 * np.cos(q3_8)) ** 2 - m4 ** 2),
- a2 + a3 * np.cos(q3_8) + m4)
-
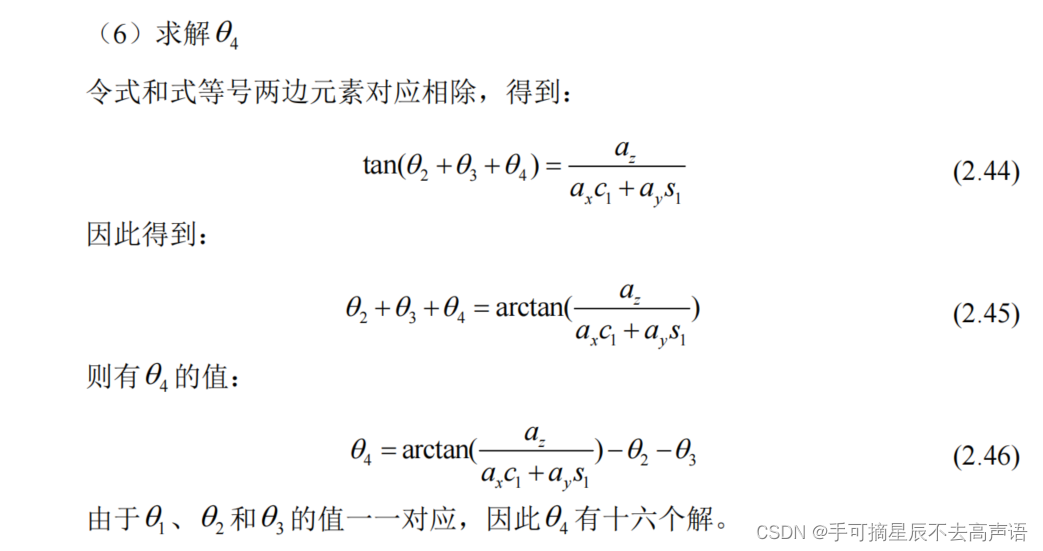
- # 求解q4
- # 见论文公式(2.46)
- if not q3_1:
- q4_1 = False
- q4_2 = False
- else:
- q4_1 = np.arctan2(az, ax * np.cos(q1_1) + ay * np.sin(q1_1)) - q3_1 - q2_1
- q4_2 = np.arctan2(az, ax * np.cos(q1_1) + ay * np.sin(q1_1)) - q3_1 - q2_2
- if q4_1 > np.pi:
- q4_1 = q4_1 - np.pi
- elif q4_1 < -np.pi:
- q4_1 = q4_1 + np.pi
- if q4_2 > np.pi:
- q4_2 = q4_2 - np.pi
- elif q4_2 < -np.pi:
- q4_2 = q4_2 + np.pi
- if not q3_2:
- q4_3 = False
- q4_4 = False
- else:
- q4_3 = np.arctan2(az, ax * np.cos(q1_1) + ay * np.sin(q1_1)) - q3_2 - q2_3
- q4_4 = np.arctan2(az, ax * np.cos(q1_1) + ay * np.sin(q1_1)) - q3_2 - q2_4
- if q4_3 > np.pi:
- q4_3 = q4_3 - np.pi
- elif q4_3 < -np.pi:
- q4_3 = q4_3 + np.pi
- if q4_4 > np.pi:
- q4_4 = q4_4 - np.pi
- elif q4_4 < -np.pi:
- q4_4 = q4_4 + np.pi
- if not q3_3:
- q4_5 = False
- q4_6 = False
- else:
- q4_5 = np.arctan2(az, ax * np.cos(q1_1) + ay * np.sin(q1_1)) - q3_3 - q2_5
- q4_6 = np.arctan2(az, ax * np.cos(q1_1) + ay * np.sin(q1_1)) - q3_3 - q2_6
- if q4_5 > np.pi:
- q4_5 = q4_5 - np.pi
- elif q4_5 < -np.pi:
- q4_5 = q4_5 + np.pi
- if q4_6 > np.pi:
- q4_6 = q4_6 - np.pi
- elif q4_6 < -np.pi:
- q4_6 = q4_6 + np.pi
- if not q3_4:
- q4_7 = False
- q4_8 = False
- else:
- q4_7 = np.arctan2(az, ax * np.cos(q1_1) + ay * np.sin(q1_1)) - q3_4 - q2_7
- q4_8 = np.arctan2(az, ax * np.cos(q1_1) + ay * np.sin(q1_1)) - q3_4 - q2_8
- if q4_7 > np.pi:
- q4_7 = q4_7 - np.pi
- elif q4_7 < -np.pi:
- q4_7 = q4_7 + np.pi
- if q4_8 > np.pi:
- q4_8 = q4_8 - np.pi
- elif q4_8 < -np.pi:
- q4_8 = q4_8 + np.pi
- if not q3_5:
- q4_9 = False
- q4_10 = False
- else:
- q4_9 = np.arctan2(az, ax * np.cos(q1_2) + ay * np.sin(q1_2)) - q3_5 - q2_9
- q4_10 = np.arctan2(az, ax * np.cos(q1_2) + ay * np.sin(q1_2)) - q3_5 - q2_10
- if q4_9 > np.pi:
- q4_9 = q4_9 - np.pi
- elif q4_9 < -np.pi:
- q4_9 = q4_9 + np.pi
- if q4_10 > np.pi:
- q4_10 = q4_10 - np.pi
- elif q4_10 < -np.pi:
- q4_10 = q4_10 + np.pi
- if not q3_6:
- q4_11 = False
- q4_12 = False
- else:
- q4_11 = np.arctan2(az, ax * np.cos(q1_2) + ay * np.sin(q1_2)) - q3_6 - q2_11
- q4_12 = np.arctan2(az, ax * np.cos(q1_2) + ay * np.sin(q1_2)) - q3_6 - q2_12
- if q4_11 > np.pi:
- q4_11 = q4_11 - np.pi
- elif q4_11 < -np.pi:
- q4_11 = q4_11 + np.pi
- if q4_12 > np.pi:
- q4_12 = q4_12 - np.pi
- elif q4_12 < -np.pi:
- q4_12 = q4_12 + np.pi
- if not q3_7:
- q4_13 = False
- q4_14 = False
- else:
- q4_13 = np.arctan2(az, ax * np.cos(q1_2) + ay * np.sin(q1_2)) - q3_7 - q2_13
- q4_14 = np.arctan2(az, ax * np.cos(q1_2) + ay * np.sin(q1_2)) - q3_7 - q2_14
- if q4_13 > np.pi:
- q4_13 = q4_13 - np.pi
- elif q4_13 < -np.pi:
- q4_13 = q4_13 + np.pi
- if q4_14 > np.pi:
- q4_14 = q4_14 - np.pi
- elif q4_14 < -np.pi:
- q4_14 = q4_14 + np.pi
- if not q3_8:
- q4_15 = False
- q4_16 = False
- else:
- q4_15 = np.arctan2(az, ax * np.cos(q1_2) + ay * np.sin(q1_2)) - q3_8 - q2_15
- q4_16 = np.arctan2(az, ax * np.cos(q1_2) + ay * np.sin(q1_2)) - q3_8 - q2_16
- if q4_15 > np.pi:
- q4_15 = q4_15 - np.pi
- elif q4_15 < -np.pi:
- q4_15 = q4_15 + np.pi
- if q4_16 > np.pi:
- q4_16 = q4_16 - np.pi
- elif q4_16 < -np.pi:
- q4_16 = q4_16 + np.pi
-
- ikine_1 = [q1_1, q2_1, q3_1, q4_1, q5_1, q6_1]
- ikine_2 = [q1_1, q2_2, q3_1, q4_2, q5_1, q6_1]
- ikine_3 = [q1_1, q2_3, q3_2, q4_3, q5_1, q6_1]
- ikine_4 = [q1_1, q2_4, q3_2, q4_4, q5_1, q6_1]
- ikine_5 = [q1_1, q2_5, q3_3, q4_5, q5_2, q6_1]
- ikine_6 = [q1_1, q2_6, q3_3, q4_6, q5_2, q6_1]
- ikine_7 = [q1_1, q2_7, q3_4, q4_7, q5_2, q6_1]
- ikine_8 = [q1_1, q2_8, q3_4, q4_8, q5_2, q6_1]
- ikine_9 = [q1_2, q2_9, q3_5, q4_9, q5_3, q6_2]
- ikine_10 = [q1_2, q2_10, q3_5, q4_10, q5_3, q6_2]
- ikine_11 = [q1_2, q2_11, q3_6, q4_11, q5_3, q6_2]
- ikine_12 = [q1_2, q2_12, q3_6, q4_12, q5_3, q6_2]
- ikine_13 = [q1_2, q2_13, q3_7, q4_13, q5_4, q6_2]
- ikine_14 = [q1_2, q2_14, q3_7, q4_14, q5_4, q6_2]
- ikine_15 = [q1_2, q2_15, q3_8, q4_15, q5_4, q6_2]
- ikine_16 = [q1_2, q2_16, q3_8, q4_16, q5_4, q6_2]
-
- q_ikine_list = []
- q_ikine_list_all = [ikine_1,
- ikine_2,
- ikine_3,
- ikine_4,
- ikine_5,
- ikine_6,
- ikine_7,
- ikine_8,
- ikine_9,
- ikine_10,
- ikine_11,
- ikine_12,
- ikine_13,
- ikine_14,
- ikine_15,
- ikine_16]
-
- for one_q_ikinelist in q_ikine_list_all:
- for count, q in enumerate(one_q_ikinelist):
- if not q:
- one_q_ikinelist = None
- break
- if q < q_range[count][0]/np.pi*180 or q > q_range[count][1]/np.pi*180:
- one_q_ikinelist = None
- print(one_q_ikinelist)
- break
- if one_q_ikinelist is not None:
- q_ikine_list.append(one_q_ikinelist)
-
- return q_ikine_list

……具体的解一共有十六个,但是不是每一个值都是有效的,则需要我们去鉴别!
但是我也不是很会取舍其中的解析解,我认为从以下几方面考虑:
奇异解位置、关节角约束、性能约束……
时间最优、能量最优、路径最优……
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/从前慢现在也慢/article/detail/535324
推荐阅读
相关标签

