
热门标签
热门文章
- 1Django会话技术Cookie&Session
- 2C++类和对象中的const成员,取地址及const取地址操作符重载_通过同一类创建的对象,其常数据成员(const)使用相同的地址
- 3github之git命令相关使用_github怎么用http拉git命令
- 4微信小程序开发之——婚礼邀请函-美好时光页面(4
- 5小程序分享携带参数,被覆盖问题_小程序onshareappmessage 传输参数接收不到
- 6【记录】OpenAI|Python调用GPT API的开发环境及代码(2024/03/21实测)_openai python 版本
- 7【保姆级教程】Windows 远程登陆 Linux 服务器的两种方式:SSH + VS Code,开发必备_windows 登录linux服务器
- 8嵌入(embedding)层的理解_我们中文,一共只有10个字。。。只是假设啊,那么我们用0-9就可以表示完 比如,这十
- 9LeetCode二叉树基础题(不断更新)
- 10【头歌-Python】Python第八章作业(初级)_【头歌-python】python第八章作业(初级)
当前位置: article > 正文
海康摄像头与Livox mid360雷达时间同步前的思路与准备_摄像头怎么和相控雷达联动
作者:从前慢现在也慢 | 2024-05-26 00:08:42
赞
踩
摄像头怎么和相控雷达联动
前言
今天到永川出差,没实物可以碰,看看文档思考到相机和雷达的同步思路。
一、思路
因为Livox mid360雷达只支持GPS的时间同步方案(仅pps的方案做不了),故使用pps+GPRMC信号的方案来做时间同步。但是这样做随之而来会有两个问题:
- 因为Livox需要1hz的方波,而海康摄像头需要10hz的方波,而GPS只能输出1hz的pps信号,故还需要加入STM32单片机来分解GPS输入的pps,输出1hz和10hz的方波
- Livox硬件支持直接输入GPRMC信号从而获得UTC时间,但是海康摄像头并不支持直接输出GPRMC信号。故需要将GPS输出的GPRMC信号从串口输入到PC,由PC将时间再输入给海康的SDK,之后采用Livox思路,设置图像时间为GPS时间,并保持此时间基准持续累加,来实现GPS和设备的时间同步。
二、步骤
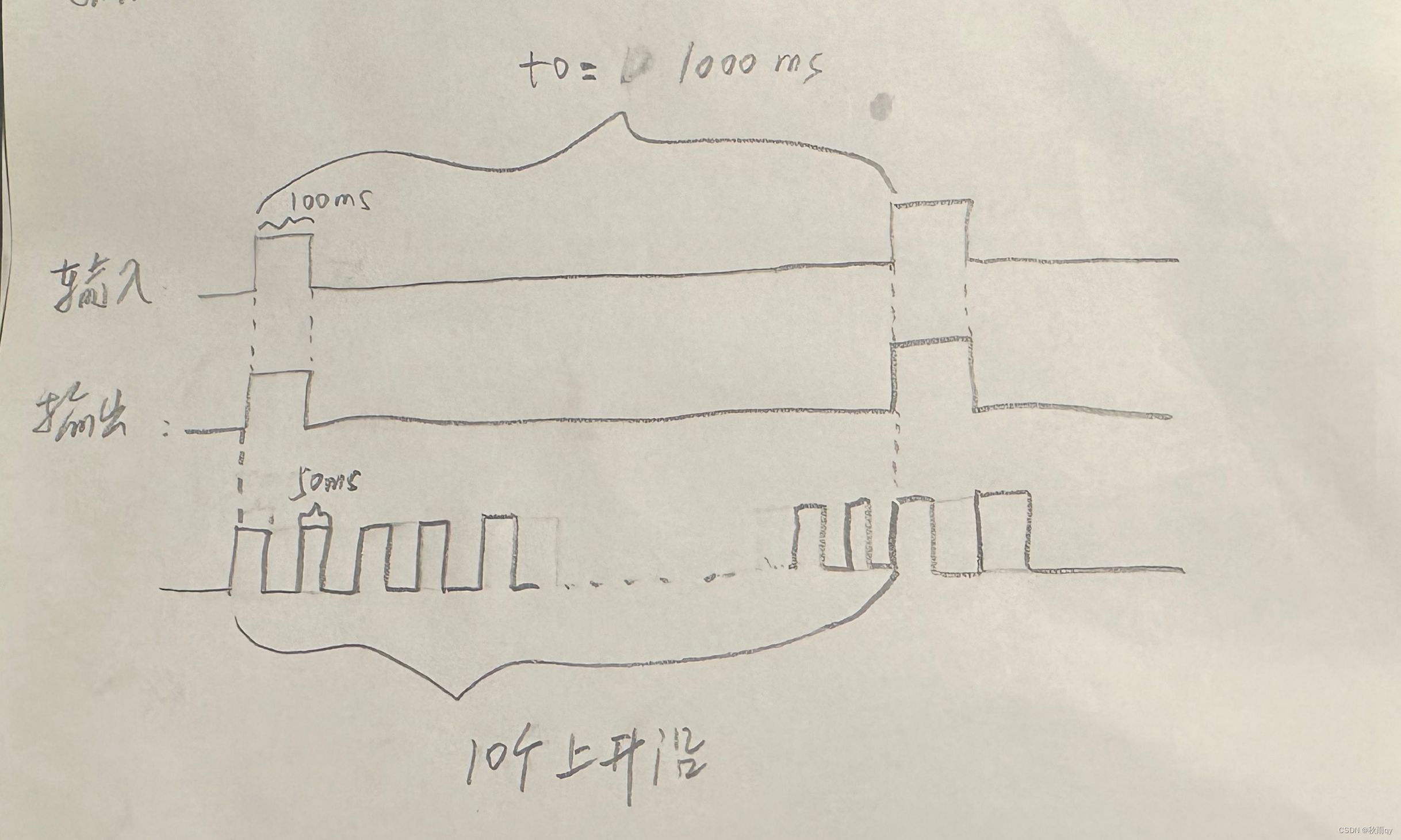
1. STM32步骤
使用上升沿中断捕获GPS的pps信号,捕获到之后使用定时器记时,分解出10hz的方波,同时输出原本的1hz。时序图如下所示(很丑):
2. GPRMC信号
2.1 Livox Mid-360
可直接接入GPS的TX,无需多余操作,如果timestamp_type为2,则说明设备正在进行GPS时间同步:

2.2 海康相机
将GPS输出的GPRMC信号从串口输入到PC,由PC将时间再输入给海康的SDK,之后采用Livox思路,设置图像时间为GPS时间,并保持此时间基准持续累加,来实现GPS和设备的时间同步。这一部分还有点问题,下一节会着重解析。
3. 接线
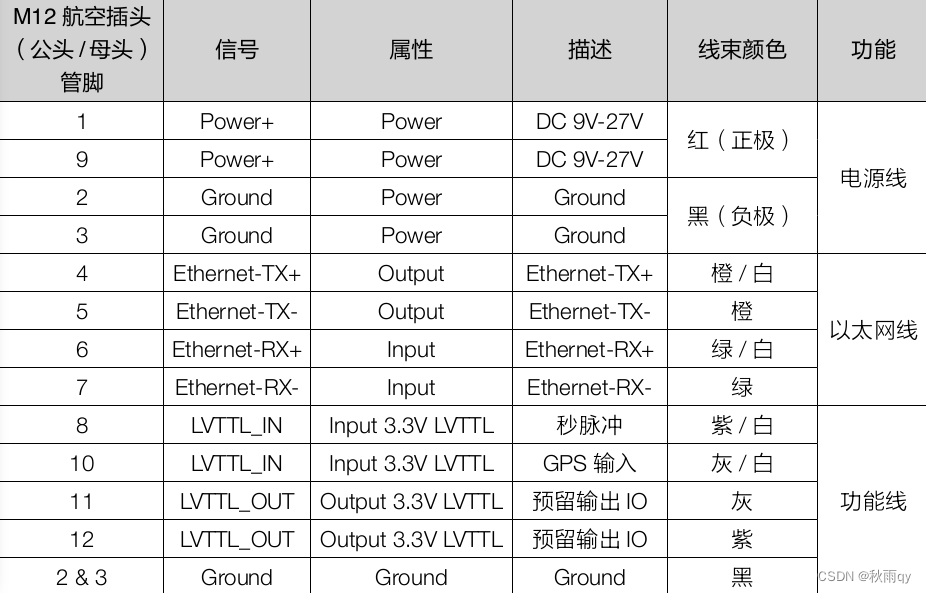
3.1 Livox Mid-360
按照手册进行接线,Mid-360 的 M12 航空插头(公头)和 Livox 航插一分三线的线序及其定义如下:
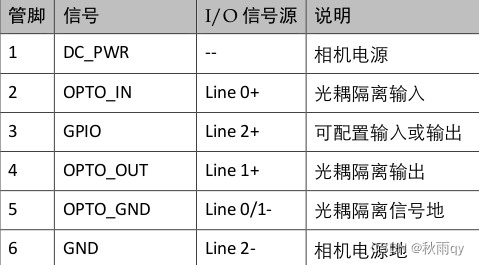
3.2 海康相机
按照手册进行接线,6-pin Hirose 接口管脚定义如下,我的线2为黑,6为黄:
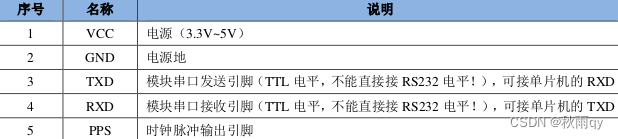
3.3 GPS模块
按照手册进行接线,模块的各个引脚的详细描述,如下表所示:
总结
主要为确定同步思路,下一节会确定海康相机GPRMC信号读取形式以及更新具体的代码实现。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/从前慢现在也慢/article/detail/624266
推荐阅读
相关标签

