- 1探索PyTorch的自然语言处理的高级特技
- 2大型企业计算机终端安全管理现状与策略分析_xx单位终端安全体系现状
- 3【论文速读】|对BusyBox进行模糊测试:利用大语言模型和崩溃重用挖掘嵌入式系统中的漏洞
- 4基于FPGA的简易计算器设计Verilog代码Quartus仿真
- 5Leaflet集成wheelnav在WebGIS中的应用
- 6IDEA中使用Git,文件不同颜色代表的含义_git 项目里文件是红色的
- 7SparkStreaming(一)基础知识_sparkstreaming 基础 与 套接字流
- 8甲方安全建设之研发安全-SCA_opensca-cli
- 9SQL复习笔记 --- 数据库设计步骤_sql数据库设计流程
- 10人工智能与智能家居:实现家居自动化的关键技术
低成本测距方案—单目深度估计
赞
踩
点击上方“计算机视觉工坊”,选择“星标”
干货第一时间送达

文章导读
导读:随着计算机视觉技术的不断发展,特别是自动驾驶等一些前沿的研究中,图像的深度信息至关重要。而单目测距得益于低成本的特性,受到了研究者们的青睐。小编最近也在学习单目测距的知识,与大家分享一篇BTS的单目测距方法,让我们一起来学习一下。
Part 01
单目和双目测距原理的区别
单目和双目是二种不同形式的摄像头,他们都能够通过采集到的图像,经过计算,从而获得距离信息,但二者的测距原理截然不同。单目测距一般称为深度估计,精度相对较低。单目测距是通过图像匹配来实现目标识别,然后通过目标在图像中的大小来估计目标距离。而双目测距是通过二幅图像之间的视差图来实现距离的计算,该方法无需识别目标的类型,且精度相比单目测距要更准确。
Part 02
单双目测距的优缺点
单目测距的优势是成本较低,系统结构简单,且对计算量的需求不高。但其缺点在于需要更新和维护一个庞大的样本数据库,才能保证较高的识别率,整体的测距准确度较低。
双目测距的优势在于精度较高,其直接利用视差图的原理直接进行测距,无需维护样本数据库,且整理的测距精度较高。其缺点在于双目测距的成本要比单目高,同时双目系统对计算性能的要求非常高,通常需要配备专用的图像处理芯片。
Part 03
单目测距的难点
单目测距是一个不适定的问题,因为有无限多个3D场景可以投影到同一2D场景。为了从单幅图像中理解几何配置,人们不仅需要考虑局部线索,还需要考虑全局上下文。
注:适定问题(well-posed problem)和不适定问题(ill-posed problem)都是数学领域的术语。前者需满足三个条件,若有一个不满足则称为"ill-posed problem":
(1) a solution exists:解必须存在
(2) the solution is unique :解必须唯一
(3) the solution's behavior changes continuously with the initial conditions:解能根据初始条件连续变化,不会发生跳变,即解必须稳定
Part 04
BTS方法的提出
卷积神经网络通常有2个部分组成,即用于密集特征提取的编码器和用于预测期望深度的解码器。在编解码器的方案中,重复的跨步卷积和空间池化层降低了过度输出的空间分辨率,并采用跳跃连接或多层反卷积网络技术将分辨率恢复到原始分辨率,从而实现有效的密集预测, 目前大部分网络恢复特征图到原始分辨率的方法都较为直接,会损失信息,这也是BTS论文中改进的核心内容。
BTS网络结构如下图所示:
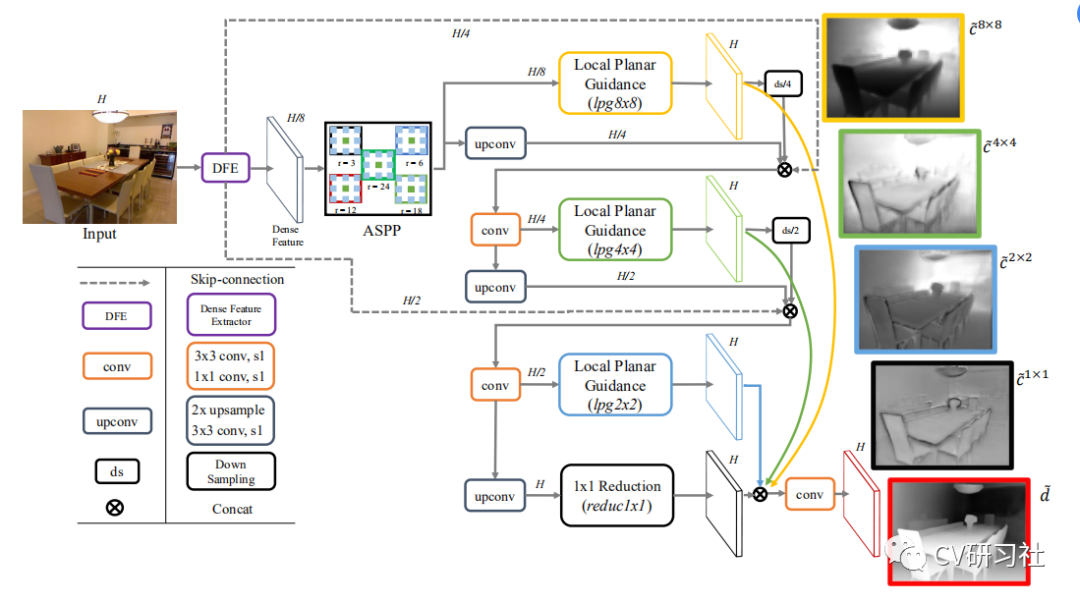
BTS网络结构图
网络的结构包含:encoder结构、跳跃连接、多孔空间金字塔池化(ASPP)和LPG层。
BTS的创新点:提出了一种局部平面指导层的网络结构(local planar guidance layers),将解码阶段的不同尺度的特征与最终的深度预测关联起来。通常的编解码器都是在解码最终的输出中施加训练损失的约束以输出深度图,小编觉得,本文提出的LPG层网络结构有应该起到了在网络中施加约束的作用。
网络的性能表现:截至目前,BTS的方法在KITTI单目深度估计的榜单中排行第7,推理速度为60ms,实现了在精度和速度上的平衡。
Part 05
LPG层的具体实现
LPG网络层提出的核心思想: 区别于传统的方法简单的使用最近邻上采样和跳跃连接来恢复图像到原始的尺寸,BTS的方法以一种有效的方式(LPG layers)定义内部特征和最终输出之间直接和明确的关系,将特征引导到全局分辨率,并将他们结合起来得到最终的深度估计。
具体的做法: 给定一个空间分辨率为H/K的特征映射,所提出的LPG层对每个空间单元估计一个4D平面系数,平面的大小与特征分辨率对应。该系数适合全分辨率 H 上局部定义的 k × k patch,并且它们通过最后的卷积层连接在一起以进行最终预测。例如,输入特征分辨率是1/4时,每个位置输出的4D向量会拟合一个4*4的平面。简单来说,4D平面系数会拟合一个比输入特征分辨率更大的平面,这样,尽管输入的特征图分辨率不同,但最终都会输出大小相同的一张平面图。LPG层的示意图如下:
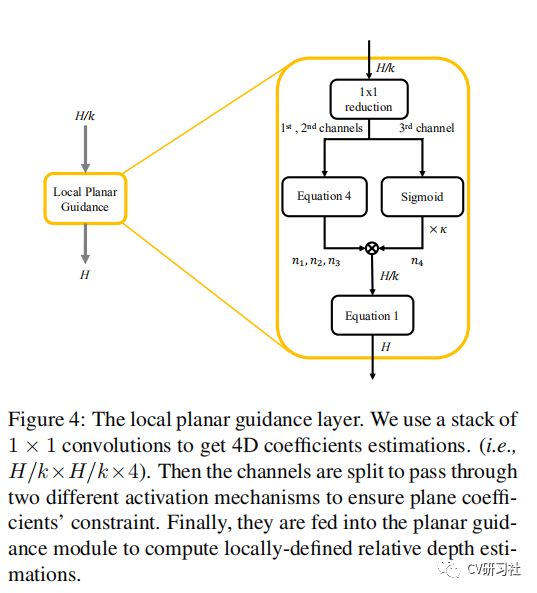
(1) 使用1×1的卷积进行通道数的降低,每进行一次1×1的卷积通道数减少2倍,直至channel=3,因为彩色图像的通道数为3,至此得到一个H/K×H/K×3的特征映射。
(2) Channel1和channel2的代表了平面法向量的2个自由度,分别是polar(θ)和azimuthal angles(φ),接下来将特征图的前二个通道视为角度,并使用如下的公式将他们转换为单位法向量。

Channel3代表 plane和origin的垂直距离(perpendicular distance)。
(3) 经过变换,每一个像素都会对应一组4D向量(n1,n2,n3,n4)。
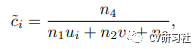
(4) 为了使用局部平面假设来指导特征,使用射线平面相交的方法来将每个估计的4D平面系数转换为K×K局部深度线索。转换公式如下图所示,其中(ui, vi) 是像素 i 的 k × k 逐块归一化坐标,c是最终的拟合结果。
Part 06
实验
评价指标:
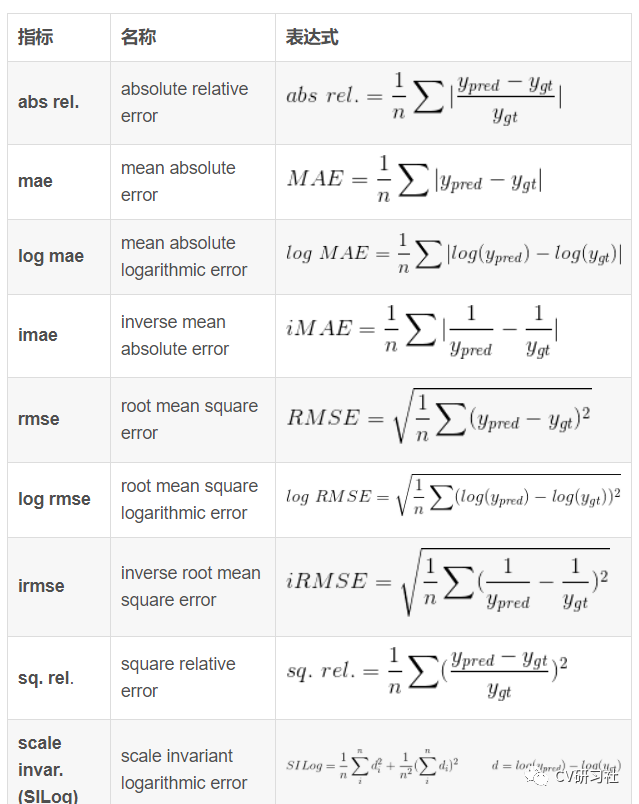
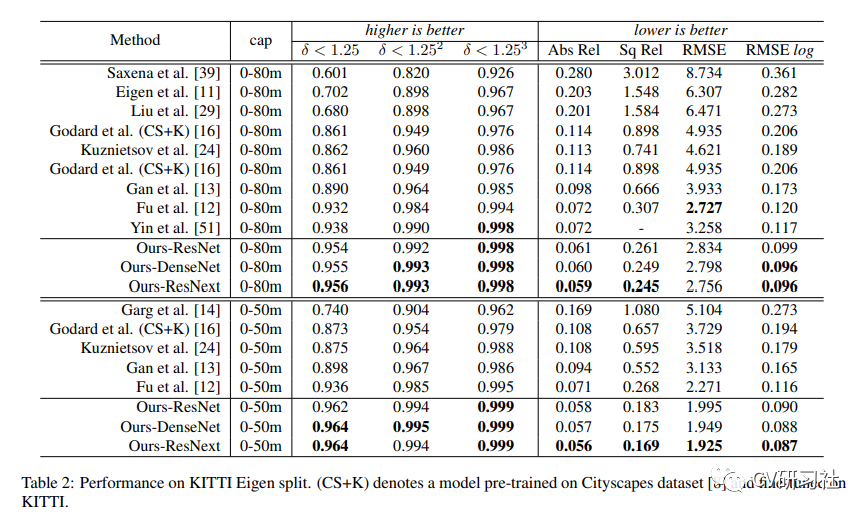
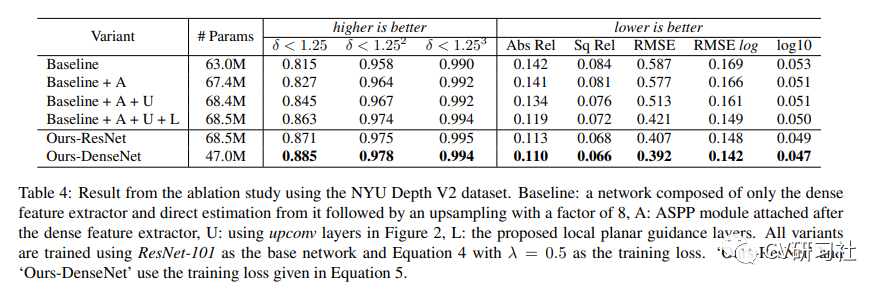
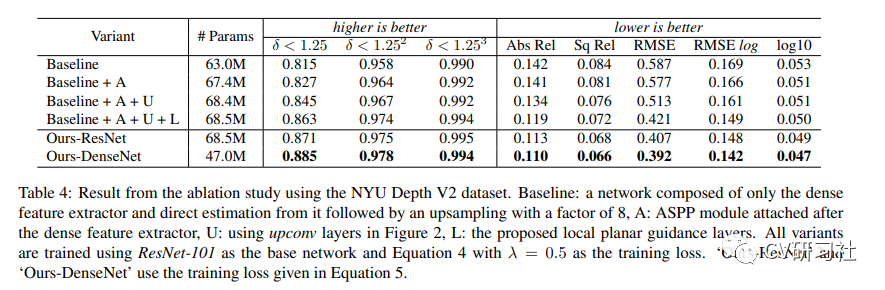
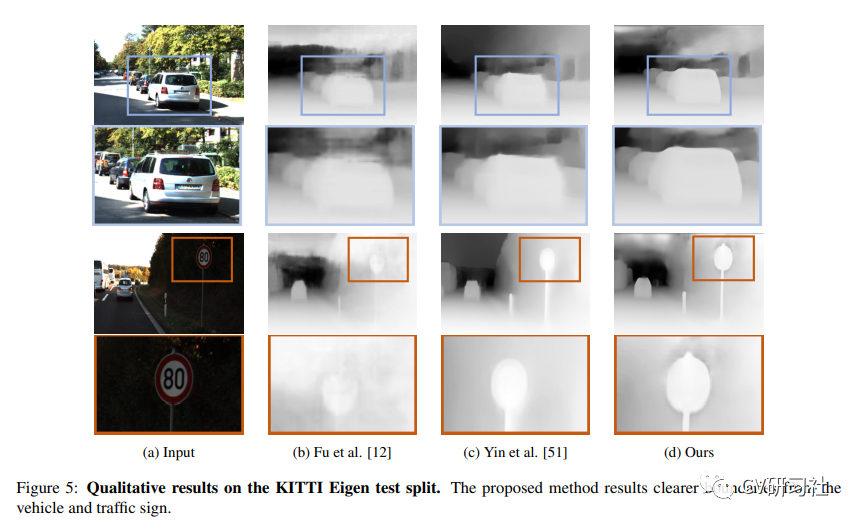
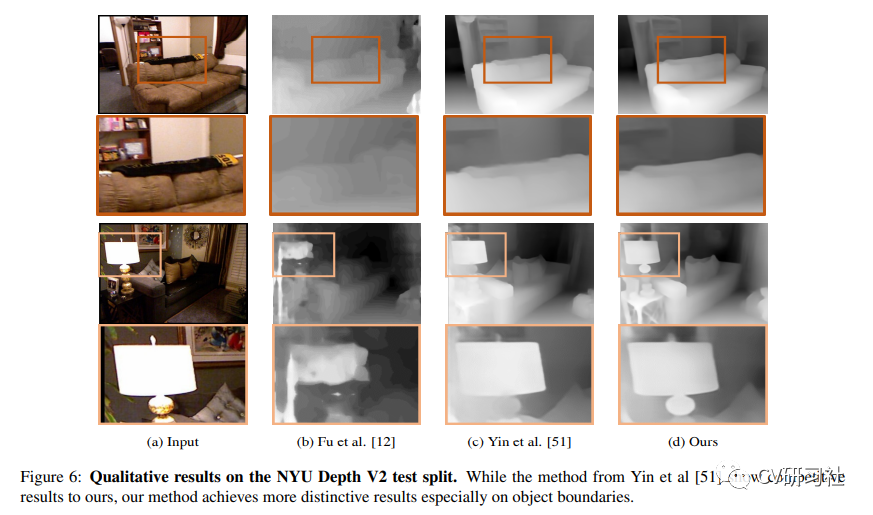
实验结果:作者在2大公开的数据集:KITTI和NYU Depth V2上进行了实验,以下是具体的实验结果。
Part 07
总结
文中作者研究了enconde-decoder结构,分析了现有方法decoder部分进行暴力上采样的缺点。提出了LPG网络层的结构,通过将decoder阶段不同尺度的特征与最终的输出深度预测关联起来,实现了对特征的更充分和有效的利用,从而提升的网络的整体效果,小编觉得该模块可以迁移到其他的任务中进行使用,对网络的性能提升应该也有帮助。
本文仅做学术分享,如有侵权,请联系删文。
下载1
在「计算机视觉工坊」公众号后台回复:深度学习,即可下载深度学习算法、3D深度学习、深度学习框架、目标检测、GAN等相关内容近30本pdf书籍。
下载2
在「计算机视觉工坊」公众号后台回复:计算机视觉,即可下载计算机视觉相关17本pdf书籍,包含计算机视觉算法、Python视觉实战、Opencv3.0学习等。
下载3
在「计算机视觉工坊」公众号后台回复:SLAM,即可下载独家SLAM相关视频课程,包含视觉SLAM、激光SLAM精品课程。
重磅!计算机视觉工坊-学习交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有ORB-SLAM系列源码学习、3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、深度估计、学术交流、求职交流等微信群,请扫描下面微信号加群,备注:”研究方向+学校/公司+昵称“,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进去相关微信群。原创投稿也请联系。

▲长按加微信群或投稿

▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列三维点云系列结构光系列、手眼标定、相机标定、orb-slam3知识点汇总、入门进阶学习路线、最新paper分享、疑问解答五个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近2000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款
圈里有高质量教程资料、答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~