
- 1数据库系统课程设计:高校学生成绩管理系统,openGauss数据库,C#界面。_数据库课程设计学生成绩管理系统
- 2VM虚拟机-安装Linux、windows、windows server超详细步骤演示_虚拟机要下载win版本还是linux版本
- 3OSPF笔记2
- 4【数据结构】线性表之《无头单链表》超详细实现
- 5知乎热议“如何看待 2022 年秋招算法岗人间地狱”_人间地狱 知乎
- 6本地笔记本连接sqlserver数据库连接失败 证书链是由不受信任的颁发机构颁发的_证书链是由不受信任的颁发机构颁发的 已与数据库连接
- 7基于51单片机电子钟闹钟12/24小时制LCD显示( proteus仿真+程序+设计报告+讲解视频)_s0082 51单片机电子钟12-24时制设计
- 8Avalonia在Linux上的运行_avalonia 麒麟 输入法
- 9图文讲解:iOS App提交流程_ios developer 创建app sku 是什么
- 10RabbitMQ消息堆积处理
Windows下的Robotics Library入门(一)——安装及演示_robot library
赞
踩
原文看这里
对于Windows系统,我们提供一个最新发布的机器人库(Robitics Library,以下简称RL)安装包,更重要的是,这个版本包含了所需的依赖项。(译者注:有了这个安装包省事很多,不用自己用CMake Build了)

在Windows下,可以通过这个N合一安装包机器人库以及相关依赖项。N合一安装包下载地址。
RL具有强大的功能集合,包括了数学、硬件接口、路径规划算法以及可视化功能。其中包含了 若干其他的开源项目,为了方便用户使用,这些开源项目库已经被集成到这个N合一安装包中。(译者注:包括了鼎鼎大名的Boost,Coin3d等)
我们决定在Visual Studio 2010(32bit)下构建这个环境,并排除Qt的依赖。因为我们认为这个配置将会对新用户更加有帮助。同时,这个安装包在被编译时没有包含相机驱动等很少使用的功能。这避免了因为极少用到的依赖库而令安装过程更加复杂。
在Windows下安装
关于Qt的开发文档没有包含在这个RL安装包中。请确保安装RL之前请先安装官方安装包Qt 4.8.5 32-bit Visual Studio 2010 。
完成Qt的安装后,下载RL并且开始安装(为保险起见,请直接用管理员身份运行该安装包)。

为了能够运行演示程序,请依据下表,增加系统环境变量(译者注:我的电脑(右键)-属性-高级系统设置-高级-环境变量-系统变量)
RL安装包不会修改您的环境变量,您需要手动添加它们以完成安装以及运行后续的程序。
| 变量名 | 值 | 设置\增加 |
|---|---|---|
| QMAKESPEC | win32-msvc2010 | 设置 |
| QTDIR | C:\Qt\4.8.5 | 设置 |
| RL_DIR | C:\Program Files (x86)\rl‑0.6.2 | 设置 |
| PATH | %RL_DIR%\bin;%QTDIR%\bin; | 增加 |
为了能够编译您自己编写的程序,你同时也需要安装Visual Studio 2010编译器(例如其免费的简易版)以及跨平台构建系统CMake>=2.8.11 。使用Visual Studio的时候,请确保您已经安装了最新的版本,至少需要SP1.
RL功能演示
演示程序可以直接通过菜单栏点击运行(找到Roboitcs Library)或者通过在命令行终端下执行一下指令:
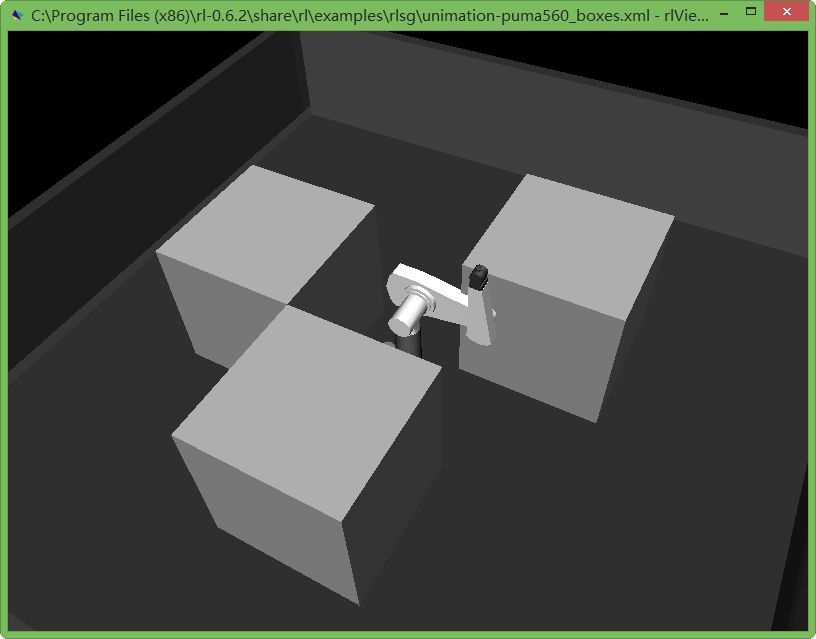
第一个演示程序演示了利用场景组件来显示Unimation Puma 560机械臂的场景。
"%RL_DIR%\bin\rlViewDemo.exe" "%RL_DIR%\share\rl\examples\rlsg\unimation-puma560_boxes.xml"- 1
译者通过第一种方法执行演示程序,界面如下:
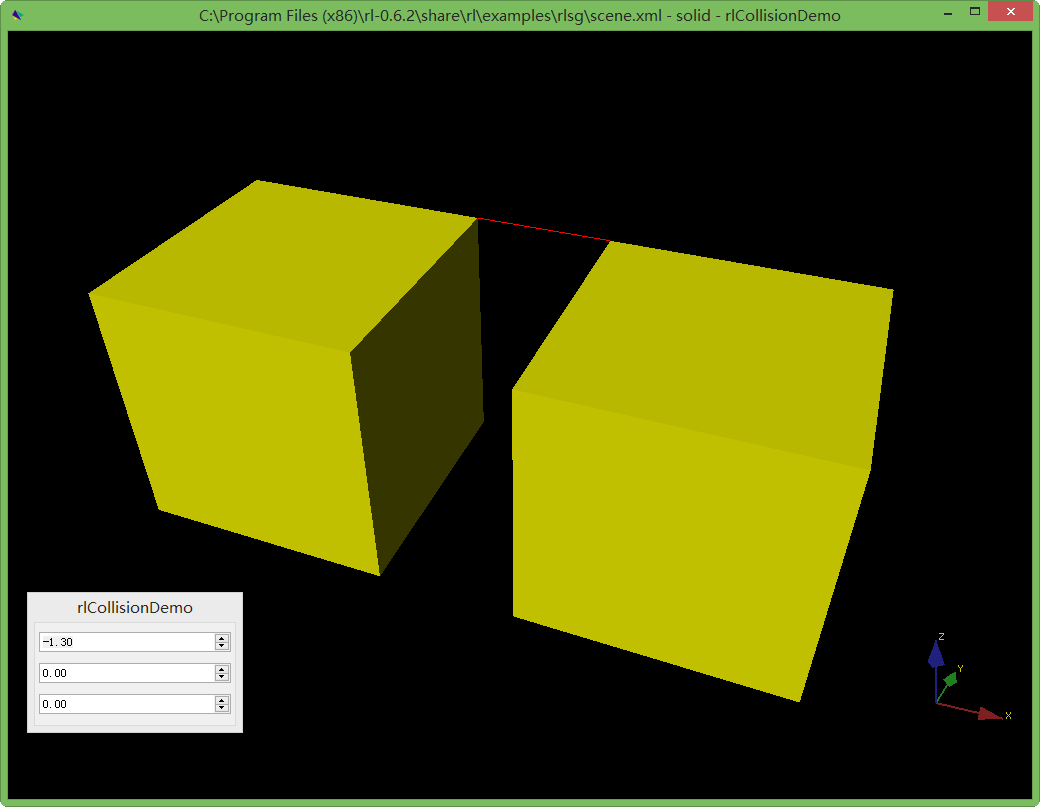
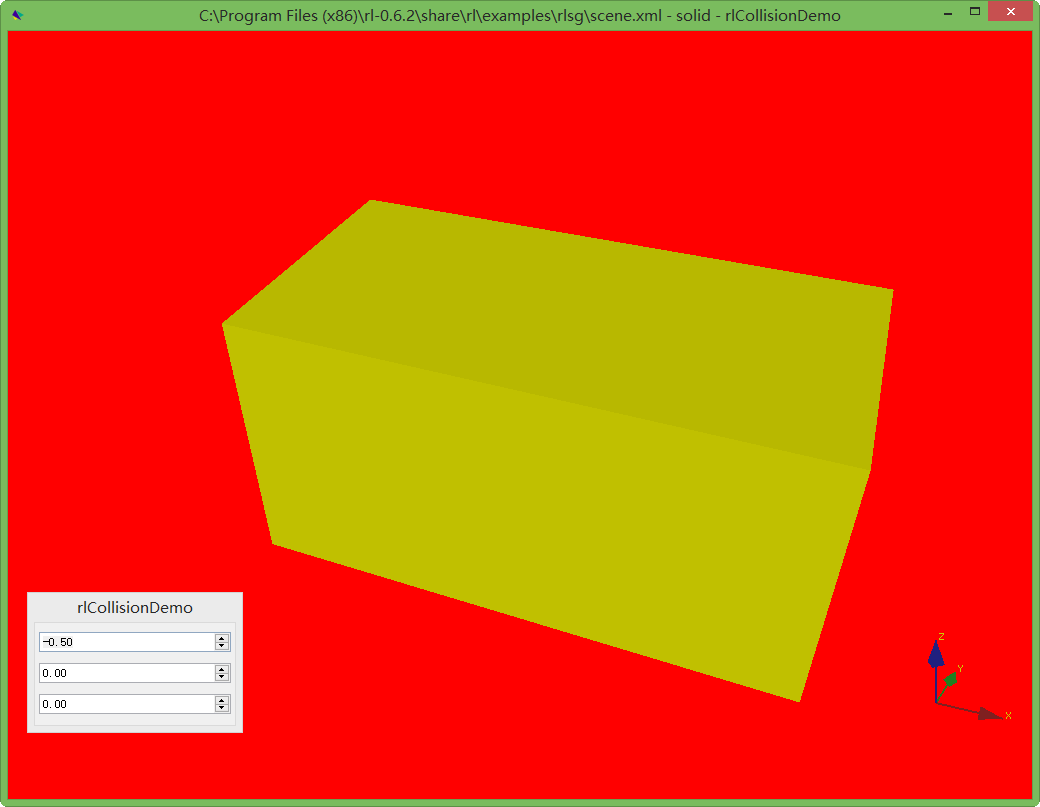
您也可以试试两个箱体在一个简单场景里的碰撞检测以及距离计算
"%RL_DIR%\bin\rlCollisionDemo.exe" "%RL_DIR%\share\rl\examples\rlsg\scene.xml"- 1
译者通过第一种方法执行演示程序,界面如下:
下面的两个演示程序通过Unimation Puma560 机械臂来演示本库的机器人运动学和可视化功能
"%RL_DIR%\bin\rlCoachKin.exe" "%RL_DIR%\share\rl\examples\rlsg\unimation-puma560_boxes.xml" "%RL_DIR%\share\rl\examples\rlkin\unimation-puma560.xml"- 1
"%RL_DIR%\bin\rlCoachMdl.exe" "%RL_DIR%\share\rl\examples\rlsg\unimation-puma560_boxes.xml" "%RL_DIR%\share\rl\examples\rlmdl\unimation-puma560.xml"- 1
译者通过第一种方法执行演示程序,界面如下:
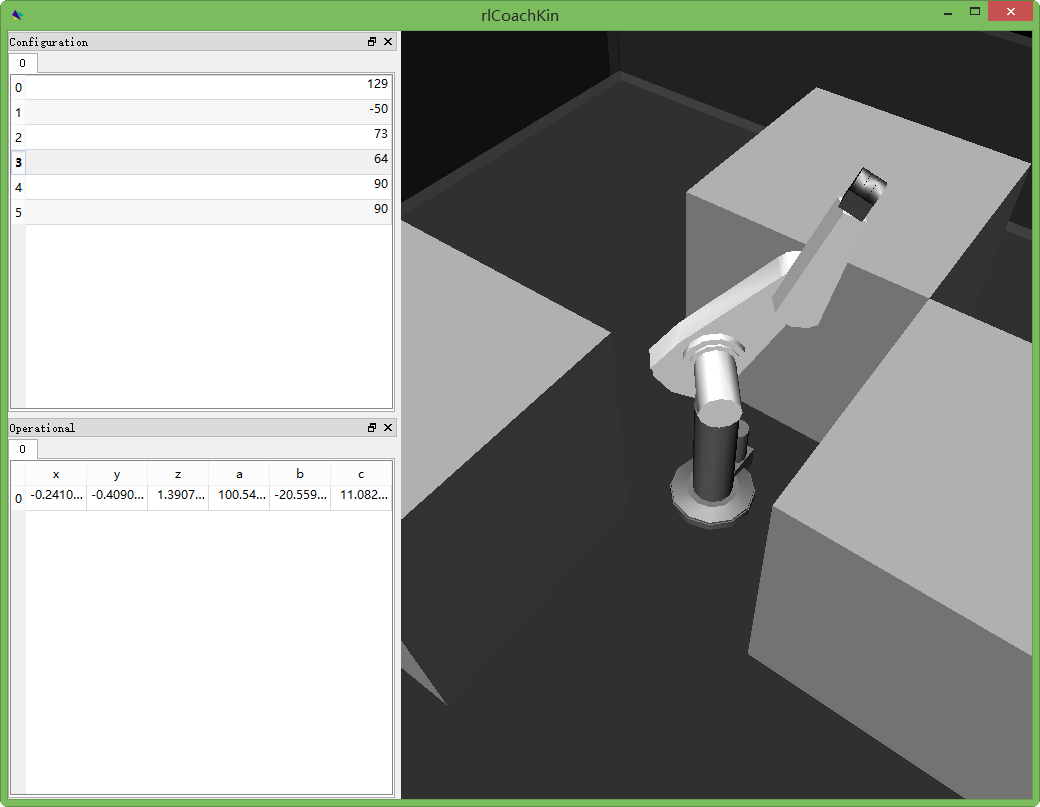
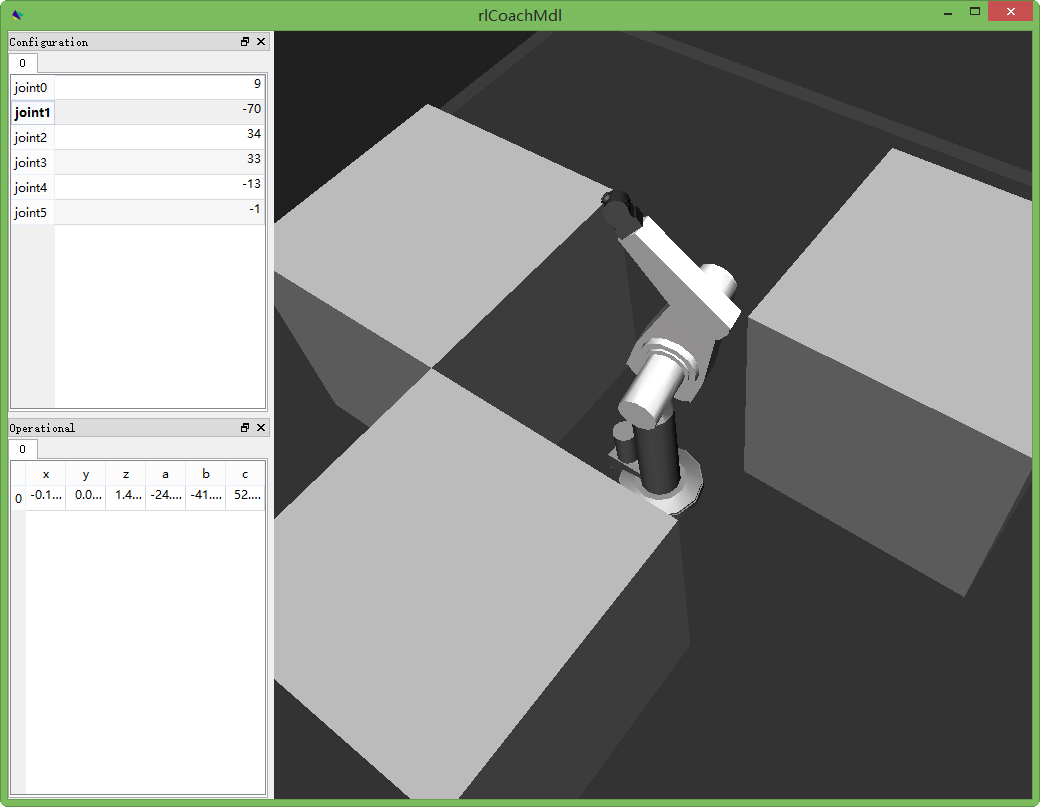
译者注:两个程序除了细节不同之外,其余基本一样,具体有什么不同,但在API里可以看到Mdl和Kin是两个不同的组件,但Kin没有介绍,这个有待研究。
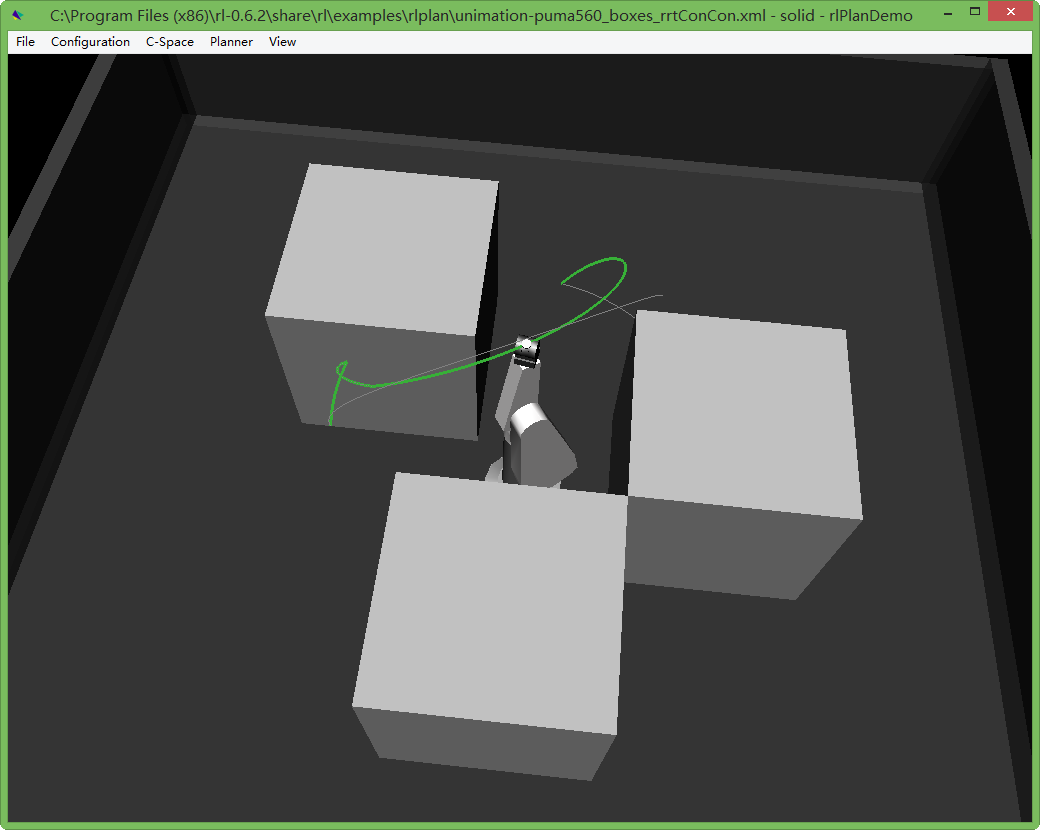
最后,您也可以利用路径规划演示程序来看看Unimation Puma560机械臂利用(快速扩展随机树算法)来进行无碰运动规划。
"%RL_DIR%\bin\rlPlanDemo.exe" "%RL_DIR%\share\rl\examples\rlplan\unimation-puma560_boxes_rrtConCon.xml"- 1
译者通过第一种方法执行演示程序,界面如下:
继续学习Windows下的RL初步使用 来了解如何利用RL进行开发。
译者注:RL库非常强大,而且提供了API供开发使用,译者也是刚接触,但是由于课题需要,会继续研究RL。
本人是译者翻译官网的教程,水平有限,欢迎指正。以后在使用RL过程中有什么心得会记录在本博客中,欢迎关注。

