
- 1navicat 连接 mysql失败 报错 is not allowed to connect to this MySQL server 解决方法_navicat 连接mysql not allowed to connect to this mys
- 2CesiumForUnity 离线加载地图等_cesium for unity
- 3携手知名律所,合合信息旗下名片全能王打造数字化名片“新范式”
- 4几种物联网实现方式之间的比较+转载_devicehive 和fastbee对比
- 5Anaconda Jupyter notebook 安装过程详解_jupyter notebook安装conda弹出窗口是怎么回事
- 6Hive的架构、工作原理、数据类型_hive的查询的结果集是从hiveserver返回
- 7计算机程序的灵魂,如何理解算法是程序设计的灵魂
- 8【数据结构】B-树_ds b-树构建及查找
- 9大数据基础知识之什么是服务器什么是集群_集群和服务器有什么区别
- 10python窗体程序和网站交互_四、基于Flask的Python和C#交互(中篇)
3D目标检测入门:探索OpenPCDet框架
赞
踩
前言
在自动驾驶和机器人视觉这两个飞速发展的领域中,3D目标检测技术扮演着核心角色。随着深度学习技术的突破性进展,3D目标检测算法的研究和应用正日益深入。OpenPCDet,这个由香港中文大学OpenMMLab实验室精心打造的开源工具箱,为3D目标检测领域提供了一个功能强大且易于使用的平台。本文将带您走进OpenPCDet的世界,一探3D目标检测的奥秘。
主流3D目标检测框架概览
目前,有几个主流的3D目标检测框架因其强大的功能和灵活性而受到研究者和开发者的青睐:
OpenPCDet
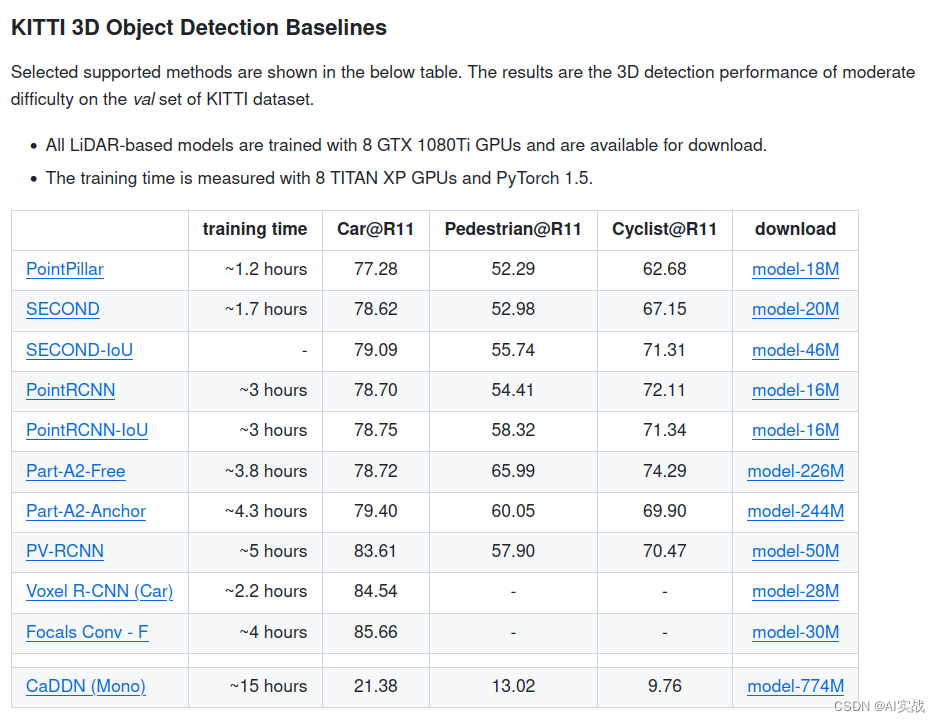
OpenPCDet是由香港中文大学OpenMMLab实验室开发的一个开源工具箱,专注于基于激光雷达(LiDAR)的3D目标检测。它支持多种算法,如PointRCNN、PV-RCNN等,并且可以处理多个标准3D检测数据集,如KITTI、Waymo、nuScenes等。
特点:
- 模块化设计:代码结构清晰,易于扩展和维护。
- 多算法支持:集成多种主流3D检测算法,方便比较和选择。
- 社区活跃:拥有活跃的开发社区和丰富的技术资源。
mmdetection3d
mmdetection3d是OpenMMLab旗下的另一个重要项目,它是一个基于PyTorch的开源3D目标检测工具箱,支持多种3D检测任务,包括单模态和多模态检测。
特点:
- 丰富的模型库:提供多种预训练模型,覆盖室内和室外场景。
- 多数据集兼容:支持SUN RGB-D, ScanNet, nuScenes, Lyft, KITTI等多个数据集。
- 灵活的配置:用户可以根据自己的需求灵活配置模型和训练参数。
Paddle3D
Paddle3D是由百度飞桨(PaddlePaddle)团队开发的3D目标检测框架,它提供了丰富的3D视觉能力,支持单目、点云等多种模态以及检测、分割等多种任务类型。
特点:
- 基于PaddlePaddle:适合熟悉PaddlePaddle的用户。
- 端到端支持:从模型训练到部署提供全流程支持。
- 与Apollo集成:与百度Apollo开放平台无缝衔接,便于自动驾驶领域的应用。
OpenPCDet不仅适用于研究者,也适合工业界的开发者使用。其简洁独立的开源平台降低了进入3D视觉领域的难度.
mmdetection3d 相比于OpenPCDet,入门门槛较高,代码阅读相对困难。模型部署工具仍在试验阶段,可能不如OpenPCDet成熟。
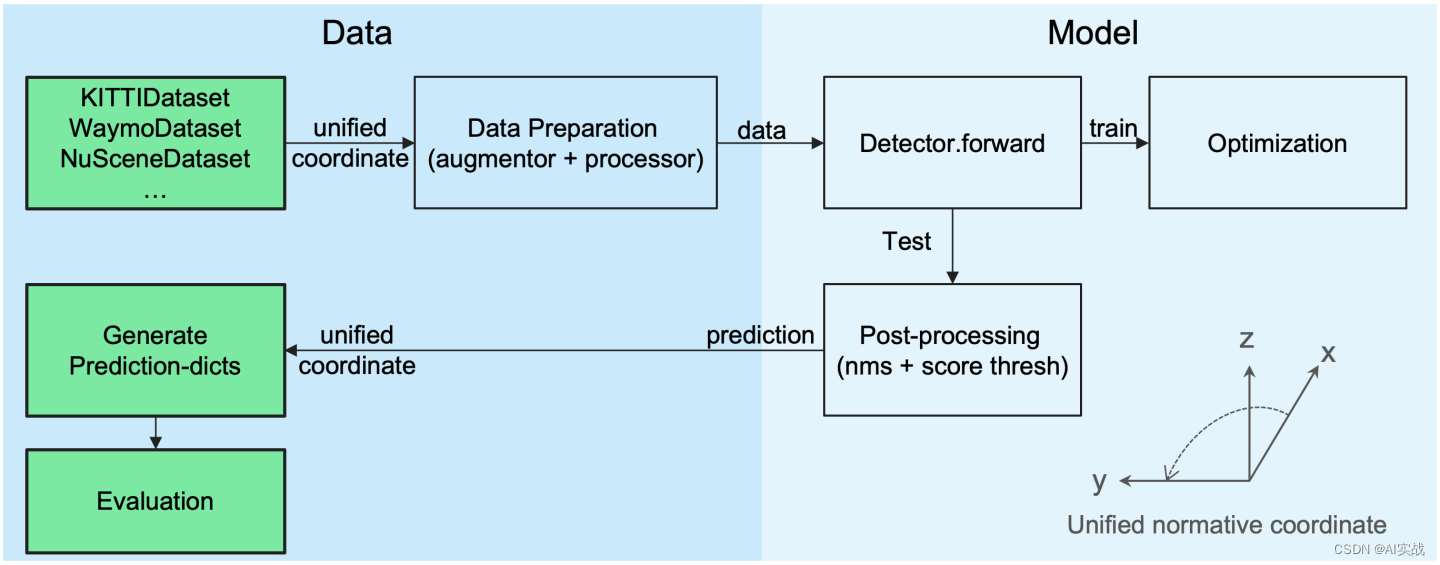
数据-模型分离
OpenPCDet采用了数据-模型分离的设计思想,这意味着数据处理和模型计算是分开的,从而使得研究者可以更灵活地处理不同数据集的3D坐标定义与转换问题.
支持多样数据集
OpenPCDet支持多种常用的点云数据集,如KITTI、NuScene、Lyft、Waymo和PandaSet等
。这些数据集在数据格式与3D坐标系上有所不同,OpenPCDet通过统一的规范化3D坐标表示来解决这一问题。
集成最新技术
OpenPCDet集成了最新的深度学习技术,包括BEVFusion, Transfusion,CaDDN。这些技术使得OpenPCDet能够高效地处理点云数据,并实现对物体的精确检测。
易用性
OpenPCDet不仅适用于研究者,也适合工业界的开发者使用。其简洁独立的开源平台降低了进入3D视觉领域的难度,同时也为提升现有应用的性能提供了可能.
大量的预训练模型可以用来迁移学习。
结论
OpenPCDet作为一个功能强大且用户友好的3D点云目标检测工具,无论是对于学术研究者还是工业界开发者,都提供了巨大的帮助。它通过集成最新技术和算法,降低了3D目标检测领域的入门门槛,并为提升现有应用的性能提供了强大动力。如果您对3D计算机视觉或自动驾驶领域充满热情,OpenPCDet绝对值得一试。
关注我的公众号auto_driver_ai(Ai fighting), 第一时间获取更新内容。

