
- 1同步FIFO与异步FIFO的基本原理_同步读指针的意义
- 2Linux中实现dhcp功能_dhcp-4.2.5-27.el7.x86_64.rpm
- 3数字艺术的新里程碑:免费ai绘画工具引领你进入未知领域
- 4科研上新 | 第1期:强可控视频生成;定制化样本检索器;用脑电重建视觉感知;大模型鲁棒性评测_ijwihd
- 5mmap虚拟映射(DMA机制)_dma mmap
- 6MySQL:视图
- 7006-动态代理是基于什么原理?
- 8Stable Diffusion结构解析-以图像生成图像!_stable diffusion unet结构
- 9Android Studio超详细安装教程_as安装教程
- 10使用Android Studio 3.0以及新版Gradle转移旧版项目可能遇到的几个坑_as3.0 使用低版本gradle
数学-机器学习-线性回归_机器学习线性回归思维导图
赞
踩
三 线性回归
Linear Regression
3.1 思维导图简述

3.2 内容
3.2.1 最小二乘法及其几何意义
背景
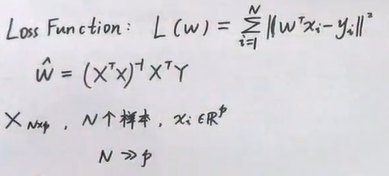
最小二乘法LSM(Least Squre Method),表面意思就是让二乘得到的结果最小,二乘又是什么呢,二乘就是两个数相乘,也就是平方,那么我们就可以轻松的得到最小二乘法的Loss Function:
L
(
w
)
=
∑
i
=
1
N
(
w
T
x
i
−
y
i
)
2
L(w) = \sum\limits_{i = 1}^N { { {\left( { {w^T}{x_i} - {y_i}} \right)}^2}}
L(w)=i=1∑N(wTxi−yi)2
A 已知

B 求
令L(w)最小的w是多少。
C 解
最后求得的结果是 w = ( X T X ) − 1 X T Y w=(X^{T}X)^{-1}X^{T}Y w=(XTX)−1XTY
其中, ( X T X ) − 1 X T {({X^T}X)^{ - 1}}{X^T} (XTX)−1XT又称为伪逆。
这里存在 ( X T X ) − 1 (X^{T}X)^{-1} (XTX)−1中的 X T X X^{T}X XTX不一定可逆的问题。

D 收获
最小二乘法的几何意义有两个:
-
在下图中,最小二乘法就是将所有的
实际值-估计值误差都累加起来.把误差分成了n段

-
高维空间的投影
把误差分散在n个维度里面
X是N*P维矩阵,按列选取p维,构成p维的子空间
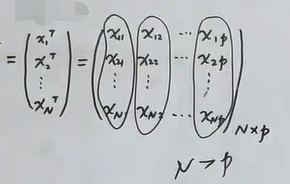
把 f f f写成 x T β x^{T}\beta xTβ的形式。然后 f ( w ) = w T x = x T β f(w)=w^{T}x=x^{T}\beta f(w)=wTx=xTβ不在p维子空间里,因为除非n个样本点都在回归曲线上,才可能出现 f ( w ) f(w) f(w)在p维子空间中。
我们要求的最小二乘法从几何意义上表述就是,向量 Y Y Y在p维空间中找一条线,让 Y Y Y离这条线最近,或者说向量 Y Y Y离这个平面最近,很显然就是 Y Y Y的投影。而这个投影就是 x 1 , x 2 , . . . , x p x_1, x_2, ..., x_p x1,x2,...,xp的线性组合。

法向量可以表示为 ( Y − X β ) (Y-X\beta) (Y−Xβ)
法向量肯定垂直于p维空间,所以 X T ( Y − X β ) = 0 X^{T}(Y-X\beta)=0 XT(Y−Xβ)=0,求解得出 β = ( X T X ) − 1 X T Y \beta=(X^{T}X)^{-1}X^{T}Y β=(XTX)−1XTY
3.2.2 最小二乘法-概率视角-高斯噪声-MLE
背景
从概率角度看最小二乘法,实际上就是用概率分布函数PDF来硬算,这个PDF要是高斯噪声才可以让最大似然估计=最小二乘估计的结果。MLE=LSE
A 已知

B 求
假设
p
(
Y
∣
x
i
,
w
)
p(Y|x_i,w)
p(Y∣xi,w)的概率密度函数是一维高斯分布函数,服从的高斯分布均值为
w
T
x
w^{T}x
wTx,方差为
σ
2
\sigma^2
σ2。求参数w的MLE。损失函数定义为:
L
(
w
)
=
l
o
g
P
(
Y
∣
X
i
,
w
)
L(w) = logP(Y|{X_i},w)
L(w)=logP(Y∣Xi,w)
C 解
当
P
(
Y
∣
x
i
,
w
)
P(Y|x_i,w)
P(Y∣xi,w)服从正态分布,才有MLE=LSE,最小二乘法估计定义为
L
(
w
)
=
∑
i
=
1
N
∥
w
T
x
i
−
y
∥
2
2
L(w) = \sum\limits_{i = 1}^N {\left\| { {w^T}{x_i} - y} \right\|_2^2}
L(w)=i=1∑N∥∥wTxi−y∥∥22

3.2.3 正则化-岭回归-频率角度
Regularization - Ridge Regression - Bayesians
背景
正则化是为了解决过拟合问题而提出的。regularization,让它正常,不要那么不正常了,那么这个不正常体现在那里呢,目前[2020-5-15]来看,不就是它过拟合了,不像正常的那样了。
过拟合是什么呢?
过拟合从字面意义上看,就是拟合过度了,什么才叫拟合过度呢?看下图。一个点,有好多情况,你得到的曲线,只适合某一种样本点,其他样本点适应性极差。
- 从数据角度分析:首先,
X
X
X是样本数据阵,它是一个
N*P维的矩阵,N表示的样本的数量,P维表示的是每一个样本的状态数,就是N个样本,每个样本是p维的。然后,理论上应该样本数N应该远大于样本的维数P,但是,实际中可能仅有几个样本,出现N<P的情况,那么就会造成过拟合 - 从数学角度分析:在
3.2.1中得到的 ( X T X ) − 1 (X^{T}X)^{-1} (XTX)−1中的 X T X X^{T}X XTX不可逆,就会直接造成过拟合。
解决过拟合的方法:
- 增加样本数量
- 特征选择/特征提取,实际就是降维,降低p的维数。PCA
- 正则化,对w约束,改变
w的形式,把 ( X T X ) − 1 (X^{T}X)^{-1} (XTX)−1改造成一个绝对可逆的式子。
正则化分为两种
- L1 -> Lasso
- L2 -> Ridge
A 已知
B 求
正则化下,新的w形式
C 解
w ^ = ( X T X + λ I ) − 1 X T Y \hat w = {({X^T}X + \lambda I)^{ - 1}}{X^T}Y w^=(XTX+λI)−1XTY

D 收获
正则化:解决过拟合问题。过拟合由
w
^
=
(
X
T
X
)
−
1
X
T
Y
\hat w = {({X^T}X)^{ - 1}}{X^T}Y
w^=(XTX)−1XTY中
(
X
T
X
)
−
1
{({X^T}X)^{ - 1}}
(XTX)−1不可逆引起。正则化就是构造新Loss Function J(w),推出的
w
^
\hat w
w^就是可逆的,且一定可逆,将不可逆变成可逆。
3.2.4 正则化-岭回归-贝叶斯角度
A 已知

B 求
参数w的最大后验估计MAP。
C 解

D 收获
从贝叶斯角度用最大后验概率估计进行分析,惊人的发现,在参数w先验知识是高斯分布的情况下,居然和正则化的最小二乘估计是一样的

3.3 问题
3.3.1 为什么贝叶斯角度分析求的就是最大后验估计MAP呢
因为贝叶斯派设置的参数w是一个概率分布,它是有先验知识的,并不像是频率派参数w是一个常数。贝叶斯派想要求出使得概率值最大的w,就需要借助贝叶斯公式进行硬算,在硬算的过程中,需要借助w的先验知识。最后要求得的那个概率值就是一个后验概率,在3.2.4中,那个后验概率是
P
(
w
∣
y
)
P(w|y)
P(w∣y)
3.3.2 正则化(regularized)是什么
将不可逆变为可逆即为正则化
为什么需要正则化,首先正则化出现的背景是最小二乘法
w
=
(
X
T
X
)
−
1
X
T
Y
w=(X^TX)^{-1}X^TY
w=(XTX)−1XTY中式子
X
T
X
X^TX
XTX可能是不可逆的,从数学角度分析就是X为N*p维的矩阵,N表示样本数,p是Xi的状态向量数,在实际应用中,可能测得的样本数很少,出现了N<P的情况,即
X
T
X
X^TX
XTX不可逆,那么w就求不来。
这样不可逆会导致什么后果呢。答,会引起过拟合。因为如果样本数过少,那么拟合的方法就会有很多。出现错误的几率就会很高。
怎么解决这个问题提,答,引入正则化。正则化实际上就是给最小二乘法的损失函数(Loss Function)L(w)加一个框架,得到一个新的函数J(w),其中
J
(
w
)
=
L
(
w
)
+
λ
P
(
w
)
J(w)=L(w)+\lambda P(w)
J(w)=L(w)+λP(w)。这样求出的w就会绝对可逆。
3.3.3 最小二乘法的第二个几何意义
真实空间是x1, x2, …, xn,测量值y没有在真实空间中,y的估计值在真实空间里最接近的那个就是它在真实空间的投影 f ( w ) = x T β f(w)=x^{T}β f(w)=xTβ,其中真实空间x与这个投影f(w)是垂直的。所以就有 X T ( Y − X β ) = 0 X^{T}(Y-Xβ)=0 XT(Y−Xβ)=0,解出β就是所求的最小二乘法得出的最优w
- 不知道为什么 f ( w ) = x T β f(w)=x^{T}β f(w)=xTβ,这个β是什么,这个β也是类似于w的参数,那条投影在真实空间中的表示就是用 x T β x^{T}β xTβ来表示。要求的也是这个β。(不同的β,Xβ表示真实空间不同的对象)
- Y-Xβ,完全是为了等式成立才这么写,这个量表示的是那条垂直的虚线,垂直的虚线和真实空间垂直,所有有了 X T ( Y − X β ) = 0 X^{T}(Y-Xβ)=0 XT(Y−Xβ)=0
3.3.4 矩阵求导规则
推荐,哈工大严质彬,矩阵论
公式查询: 矩阵求导法则与性质

参考文献
[1] shuhuai008. 【机器学习】【白板推导系列】【合集 1~23】. bilibili. 2019.
https://www.bilibili.com/video/BV1aE411o7qd?p=9
[2] 3.2.4 正则化-岭回归-贝叶斯角度手稿

[3] zealscott. 矩阵求导法则与性质. CSDN. 2018. https://blog.csdn.net/crazy_scott/article/details/80557814

