
- 1【深入理解RabbitMQ原理】RabbitMQ 配置,生产者和消费者_rabbitmq 逻辑写生产者还是消费者
- 2可以自己实现的Python小游戏,共十四个可收藏可直接拿走~_用python做游戏
- 3java代码如何降低重复率_如何降低前端代码圈复杂度?
- 4边缘设备上的chatGPT
- 5UV胶水能够粘接聚碳酸酯PC吗?粘接又要注意哪些细节呢?_聚烯烃树脂对pc材质的粘贴
- 6基于物联网及数字孪生技术的数字农业系统设计与实现_设施农业物联网拓扑结构图
- 7【python】python二手房数据抓取分析可视化(源码)【独一无二】_基于python的xx地区二手房数据采集与可视化分析
- 8NLP / LLMs中的Temperature 是什么?_nlp temperature
- 9修改网络地址ip时出现“出现了一个意外的情况。不能完成所有你在设置中所要求的更改。”_出现一个意外的情况,不能完成所有你的设置
- 10leetcode454刷题打卡_给你四个整数数组 nums1、nums2、nums3 和 nums4 ,数组长度都是 n ,请你计算
ES 的存储原理_es存储
赞
踩
目录
4.3、刷入 refresh 页缓存的同时,写入 translog
一、ES是什么
-
一个分布式的实时文档存储,每个字段可以被索引与搜索
-
一个分布式实时分析搜索引擎
-
能胜任上百个服务节点的扩展,并支持 PB 级别的结构化或者非结构化数据
-
基于Lucene,隐藏复杂性,提供简单易用的Restful API接口、Java API接口(还有其他语言的API接口)。ES是一个可高度扩展的全文搜索和分析引擎。它能够快速地、近乎实时地存储、查询和分析大量数据。
二、ES基本结构
2.1、结构图


简单讲解:
- Node相当于服务器,上图就是4个服务器,也叫4个数据节点
- 比如我的商品数据表的index是 es_product ,我可以把数据切割成3份,那么每一份就是一个 Shared(类似于Mysql的table分表),比如上图的index1,有3个主Shared
- 假如我想把不同业务的数据分开存,比如我有外卖的数据,有商超的数据,那么加前缀,waimai_es_product,shangcha_es_product(类似于Mysql的分库)
- R-shared就是副本shared,只负责复制Primary给下来的数据,只有当primary挂了,他才上位。(保证系统稳定性,为什么P-s1和 R-s1不能放在一起,那放一起一起挂了不就完犊子了)
2.2、基本概念
-
集群(cluster)
ES集群由若干节点组成,这些节点在同一个网络内,cluster-name相同
-
节点(node)
一个ES的实例,本质上是一个java进程,生产环境一般建议一台机器上运行一个ES实例。节点可以分布在不同的机房。
-
节点有如下分类:
1、master节点:集群中的一个节点会被选为master节点,它将负责管理集群范畴的变更,例如创建或删除索引,添加节点到集群或从集群删除节点。master节点无需参与文档层面的变更和搜索,这意味着仅有一个master节点并不会因流量增长而成为瓶颈。任意一个节点都可以成为 master 节点。
2、data节点:持有数据和倒排索引。默认情况下,每个节点都可以通过设定配置文件中的node.data属性为true(默认)成为数据节点。如果需要一个专门的主节点,应将其node.data属性设置为false。
3、client节点:如果将node.master属性和node.data属性都设置为false,那么该节点就是一个客户端节点,扮演一个负载均衡的角色,将到来的请求路由到集群中的各个节点。也叫协调节点,这个节点不需要配置的,只要任何一个节点接收到请求,并且请求不需要这个节点处理,只需要他进行转发的场景下,这个节点就被叫做协调节点。 - 上面俩节点通过配置指定:
-
- node.master: true/false
- node.data: true/false

一个节点可以既为Master节点,又为Data节点,但是为什么不推荐?
因为Data节点请求过多,负载过高的时候,可能会导致es假死,也就是可能导致其他节点认为该 Master挂了,另外 Data节点会进行gc 回收,这个过程也可能影响 Master节点的正常响应。所以强烈建议 Master 只做集群管理工作,不参与data的index与query -
索引(index)
文档的容器,一类文档的集合
-
分片(shard)
单个节点由于物理机硬件限制,存储的文档是有限的,如果一个索引包含海量文档,则不能在单个节点存储。ES提供分片机制,同一个索引可以存储在不同分片(数据容器)中,这些分片又可以存储在集群中不同节点上。
分片分为主分片(primary shard) 以及从分片(replica shard)
1、主分片与从分片关系:从分片只是主分片的一个副本,它用于提供数据的冗余副本
2、从分片应用:在硬件故障时提供数据保护,同时服务于搜索和检索这种只读请求
3、是否可变:索引中的主分片的数量在索引创建后就固定下来了,但是从分片的数量可以随时改变
-
文档(document)
可搜索的最小单元 ,json格式保存
2.3、与关系数据库概念的类比
| RDBMS | ES |
|---|---|
| Table | Index |
| Row | Document |
| Column | Field |
| Schema | Mapping |
| SQL | DSL |
分片(Shard)在数据库概念映射里面类似于分表(水平拆分)
index、type的初衷
之前es将index、type类比于关系型数据库(例如mysql)中database、table,这么考虑的目的是“方便管理数据之间的关系”。
【本来为了方便管理数据之间的关系,类比database-table 设计了index-type模型】
a. 在关系型数据库中table是独立的(独立存储),但es中同一个index中不同type是存储在同一个索引中的(lucene的索引文件),因此不同type中相同名字的字段的定义(mapping)必须一致。如果是mysql,两个table中的age字段,2个table可以分别定义成int和string,但是es不行,必须一样
b. 不同类型的“记录”存储在同一个index中,会影响lucene的压缩性能。
2.4、数据如何读写

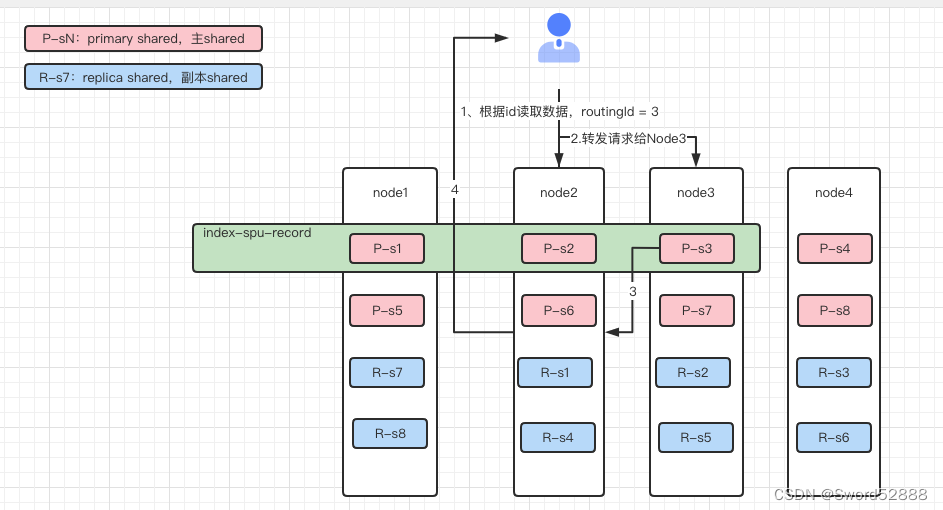
1、所有数据的处理都由 Primary Shared去处理
shard = hash(routing) % number_of_primary_shards2、假如客户端请求 Node2 写入数据,比如是往spu-record这个index写入数据,此时根据路由字段(一般是主键id)路由到数据应该写入到分片3 Shared3 上,那么此时会找到分片3所在的节点Node3,Node2转发请求给Node3去处理,Node3写入Primary主分片,写入后同步给分片3的副本Replica,同步数据成功后,会告知Node3接收数据成功,Node3发送写入成功Reponse告知Node2,Node2把response发给客户端。(Primary-shared和Replicaa-shared都可以处理读流量)
思考:如果现在请求流量打到了node2上面,但是数据所在的Primary-shared在node3上, replica-shared在node1上,那么此时到底是请求哪个shared? 那如果请求流量是打到node1上面呢?
如果请求流量打到了 Node2 上,但是数据所在的 Primary Shard 在 Node3 上,而 Replica Shard 在 Node1 上,那么 Elasticsearch 会将请求转发到 Node3 上的 Primary Shard 进行处理。如果 Node3 上的 Primary Shard 不可用,Elasticsearch 会将请求转发到 Node1 上的 Replica Shard 进行处理。
如果请求流量打到了 Node1 上,但是数据所在的 Primary Shard 在 Node3 上,而 Replica Shard 在 Node1 上,那么 Elasticsearch 会将请求转发到 Node1 上的 Replica Shard 进行处理。如果 Node1 上的 Replica Shard 不可用,Elasticsearch 会将请求转发到 Node3 上的 Primary Shard 进行处理。
需要注意的是,请求转发的过程可能会导致一定的延迟,因此在设计 Elasticsearch 集群时,需要合理分配数据和 Shard,避免数据倾斜和请求瓶颈。同时,也需要考虑硬件资源的限制,避免过多的数据迁移和请求转发导致系统性能下降。
3、读取数据如下图,假如请求Node2,但是数据在Node3,那么会转发请求到Node3去拿到数据转发给客户端。
2.5 容灾能力
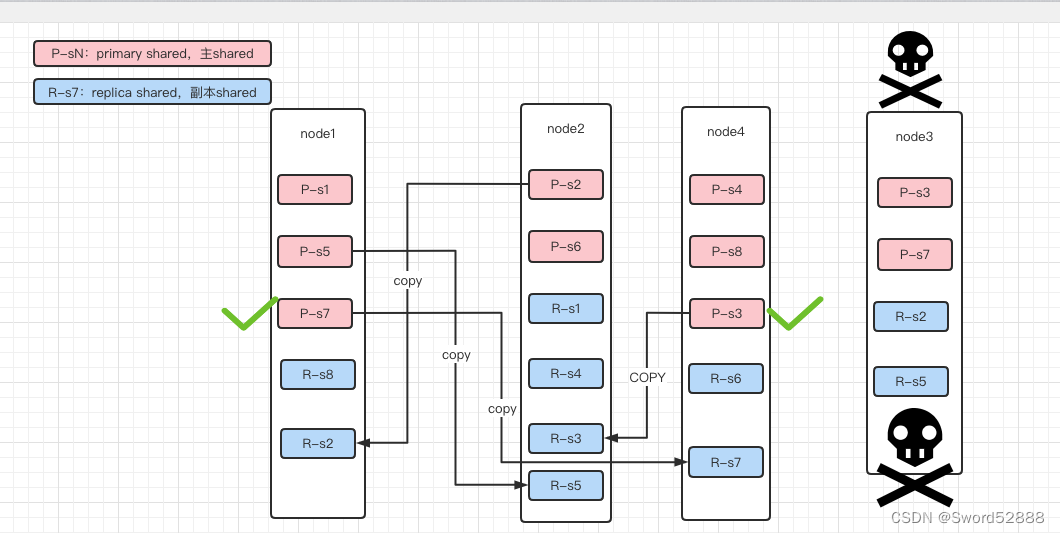
1、假如服务器 Node3 挂了
2、Node3上有2个primary节点,shared3 和 shared7,此时 Node1 上的shared7的副本会晋升成 Primary Shard,Node4 上的 shared3 的副本也会晋升成 Primary Shard 。晋升后,即可马上对外提供服务。
3、由于配置了副本数是1,所以会把已经丢失的 s3 s7 s2 s5这四个 shard 在其他Node上复制一份。(如果有200G数据,千兆网络,拷贝完需要1600秒。如果没有replica,则这1600秒内这些Shard就不能服务。所以,要求设计的时候,每个shard的数据不能存放太大,避免容灾长时间的复制数据。)
三、ES的文件存储结构
1、如何去服务器找到es的配置文件
ps -ef | grep java2、找到文件夹所在位置 es.path.home
-Des.path.home=/opt/company/apps/elasticsearch/current找到 config文件夹
/opt/company/apps/elasticsearch/current/config找到es服务的配置文件 elasticsearch.yml
less elasticsearch.yml找到 path.data
path.data: /opt/company/es_datatree 命令,或者 find . -type d -maxdepth 3

上面的 foo 是索引名称,有些可能用索引的 uuid 代替。
data/elasticsearch/nodes/0(这个0是固定的)/indices/foo/0 (这个0是foo位于这个Node上的shard分片)
每个分片的事务日志(Transaction Log)
Elasticsearch事务日志确保可以安全地将数据索引到Elasticsearch,而无需为每个文档执行低级Lucene提交。提交Lucene索引会在Lucene级别创建一个新的segment,即执行fsync(),会导致大量磁盘I / O影响性能。
为了接受索引文档并使其可搜索而不需要完整的Lucene提交,Elasticsearch将其添加到Lucene IndexWriter并将其附加到事务日志中。在每个refresh_interval之后,它将在Lucene索引上调用reopen(),这将使数据可以在不需要提交的情况下进行搜索。这是Lucene Near Real Time API的一部分。当IndexWriter最终由于自动刷新事务日志或由于显式刷新操作而提交时,先前的事务日志将被丢弃并且新的事务日志将取代它。
如果需要恢复,将首先恢复在Lucene中写入磁盘的segments,然后重放事务日志,以防止丢失尚未完全提交到磁盘的操作。
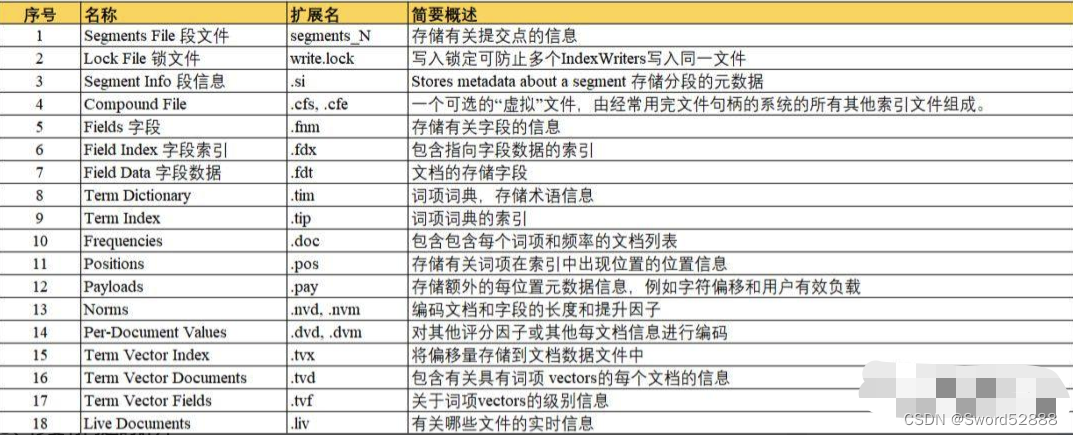
Index文件夹内文件含义(lucene文件夹)
| Name | Extension | Brief Description |
|---|---|---|
| Segment Info | .si | segment的元数据文件 |
| Compound File | .cfs, .cfe | 一个segment包含了如下表的各个文件,为减少打开文件的数量,在segment小的时候,segment的所有文件内容都保存在cfs文件中,cfe文件保存了lucene各文件在cfs文件的位置信息 |
| Fields | .fnm | 保存了fields的相关信息 |
| Field Index | .fdx | 正排存储文件的元数据信息 |
| Field Data | .fdt | 存储了正排存储数据,写入的原文存储在这 |
| Term Dictionary | .tim | 倒排索引的元数据信息 |
| Term Index | .tip | 倒排索引文件,存储了所有的倒排索引数据 |
| Frequencies | .doc | 保存了每个term的doc id列表和term在doc中的词频 |
| Positions | .pos | Stores position information about where a term occurs in the index 全文索引的字段,会有该文件,保存了term在doc中的位置 |
| Payloads | .pay | Stores additional per-position metadata information such as character offsets and user payloads 全文索引的字段,使用了一些像payloads的高级特性会有该文件,保存了term在doc中的一些高级特性 |
| Norms | .nvd, .nvm | 文件保存索引字段加权数据 |
| Per-Document Values | .dvd, .dvm | lucene的docvalues文件,即数据的列式存储,用作聚合和排序 |
| Term Vector Data | .tvx, .tvd, .tvf | Stores offset into the document data file 保存索引字段的矢量信息,用在对term进行高亮,计算文本相关性中使用 |
| Live Documents | .liv | 记录了segment中删除的doc |
四、存储步骤
页缓存 (文件系统缓存)
为了提升对文件的读写效率,Linux 内核会以页大小(4KB)为单位,将文件划分为多数据块。当用户对文件中的某个数据块进行读写操作时,内核首先会申请一个内存页(称为 页缓存)与文件中的数据块进行绑定。如下图所示:
整体存储步骤流程图

4.1、写入缓存(内存)
Doc会先被搜集到内存中的Buffer内,这个时候还无法被搜索到,如下图所示:

4.2、refresh 刷入页缓存(文件系统缓存)
Lucene支持对新段写入和打开,可以使文档在没有完全刷入硬盘的状态下就能对搜索可见,而且是一个开销较小的操作,可以频繁进行。
下面是一个已经将Docs刷入段,但还没有完全提交的示意图:
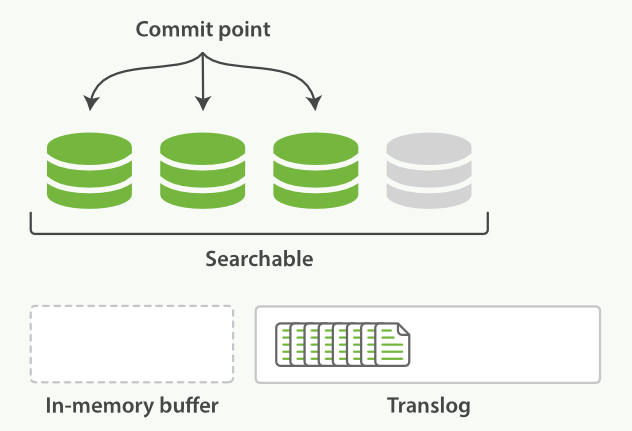
我们可以看到,新段虽然还没有被完全提交,但是已经对搜索可见了。
引入refresh操作的目的是提高ES的实时性,使添加文档尽可能快的被搜索到,同时又避免频繁fsync带来性能开销,依靠的就是文件系统缓存OS cache里缓存的文件可以被打开(open/reopen)和读取,而这个os cache实际是一块内存区域,而非磁盘,所以操作是很快的,这就是ES被称为近实时搜索的原因。
refresh默认执行的间隔是1秒,可以使用refreshAPI进行手动操作,但一般不建议这么做。还可以通过合理设置refresh_interval在近实时搜索和索引速度间做权衡。
4.3、刷入 refresh 页缓存的同时,写入 translog
translog记录的是已经在内存生成(segments)并存储到os cache但是还没写到磁盘的那些索引操作。
index segment刷入 refresh 到os cache后就可以打开供查询,这个操作是有潜在风险的,因为os cache中的数据有可能在意外的故障中丢失,而此时数据必备并未刷入到os disk,此时数据丢失将是不可逆的,这个时候就需要一种机制,可以将对es的操作记录下来,来确保当出现故障的时候,已经落地到磁盘的数据不会丢失,并在重启的时候可以从操作记录中将数据恢复过来。elasticsearch提供了translog来记录这些操作,结合os cached segments数据定时落盘来实现数据可靠性保证(flush)。
文档被添加到buffer同时追加到translog:
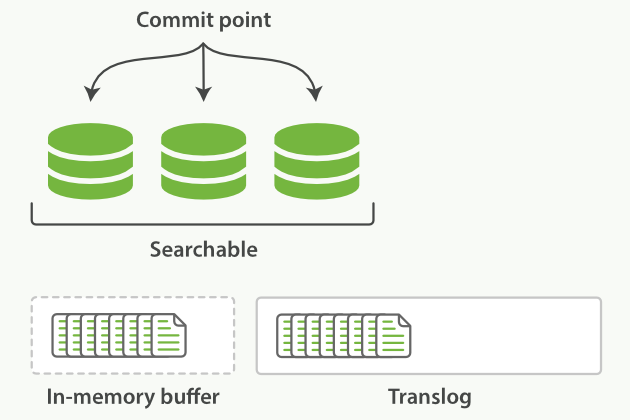
4.4、数据 flush 落盘 disk
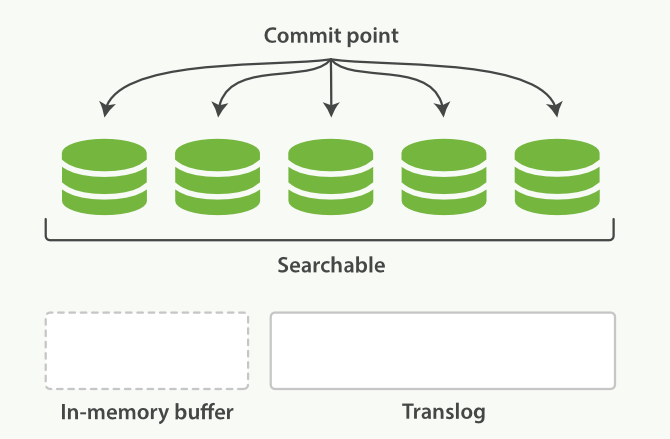
每隔一段时间(例如translog变得太大),index会被flush到磁盘,新的translog文件被创建,commit执行结束后,会发生以下事件:
- 所有内存中的buffer会被写入新段
- buffer被清空
- 一个提交点被写入磁盘
- 文件系统缓存通过
fsyncflush - 之前的旧translog被删除
4.5、Translog的页缓存(内存缓存)
translog本身也是磁盘文件,频繁的写入磁盘会带来巨大的IO开销,因此对translog的追加写入操作的同样操作的是os cache,因此也需要定时落盘(fsync)。translog落盘的时间间隔直接决定了ES的可靠性,因为宕机可能导致这个时间间隔内所有的ES操作既没有生成segment磁盘文件,又没有记录到Translog磁盘文件中,导致这期间的所有操作都丢失且无法恢复。
translog的fsync是ES在后台自动执行的,默认是每5秒钟主动进行一次translog fsync,或者当translog文件大小大于512MB主动进行一次fsync,对应的配置是
- index.translog.flush_threshold_period
- index.translog.flush_threshold_size
当 Elasticsearch 启动的时候, 它会从磁盘中使用最后一个提交点去恢复已知的段,并且会重放 translog 中所有在最后一次提交后发生的变更操作。
translog 也被用来提供实时 CRUD 。当你试着通过ID来RUD一个Doc,它会在从相关的段检索之前先检查 translog 中最新的变更。
默认translog是每5秒或是每次请求完成后被fsync到磁盘(在主分片和副本分片都会)。也就是说,如果你发起一个index, delete, update, bulk请求写入translog并被fsync到主分片和副本分片的磁盘前不会反回200状态。
这样会带来一些性能损失,可以通过设为异步fsync,但是必须接受由此带来的丢失少量数据的风险。
- PUT /my_index/_settings
- {
- "index.translog.durability": "async",
- "index.translog.sync_interval": "5s"
- }
4.6 flush
flush就是执行commit清空、干掉老translog的过程。默认每个分片30分钟或者是translog过于大的时候自动flush一次。可以通过flush API手动触发,但是只会在重启节点或关闭某个索引的时候这样做,因为这可以让未来ES恢复的速度更快(translog文件更小)。
满足下列条件之一就会触发冲刷操作:
-
内存缓冲区已满,相关参数:
indices.memory.index_buffer -
自上次冲刷后超过了一定的时间,相关参数:
index.translog.flush_threshold_period -
事物日志达到了一定的阔值,相关参数:
index.translog.flush_threshold_size
4.7 整体存储步骤讲解
- 数据写入buffer缓冲和translog日志文件中。
当你写一条数据document的时候,一方面写入到mem buffer缓冲中,一方面同时写入到translog日志文件中。 - buffer满了或者每隔1秒(可配),refresh将mem buffer中的数据生成index segment文件并写入os cache,此时index segment可被打开以供search查询读取,这样文档就可以被搜索到了(注意,此时文档还没有写到磁盘上);然后清空mem buffer供后续使用。可见,refresh实现的是文档从内存移到文件系统缓存的过程。(其实都在内存内操作)
- 重复上两个步骤,新的segment不断添加到os cache,mem buffer不断被清空,而translog的数据不断增加,随着时间的推移,translog文件会越来越大。
- 当translog长度达到一定程度的时候,会触发flush操作,否则默认每隔30分钟也会定时flush,其主要过程:
4.1. 执行refresh操作将mem buffer中的数据写入到新的segment并写入os cache,然后打开本segment以供search使用,最后再次清空mem buffer。
4.2. 一个commit point被写入磁盘,这个commit point中标明所有的index segment。
4.3. filesystem cache(os cache)中缓存的所有的index segment文件被fsync强制刷到磁盘os disk,当index segment被fsync强制刷到磁盘上以后,就会被打开,供查询使用。
4.4. translog被清空和删除,创建一个新的translog。
五、Es的其他操作
5.1、Doc删除
删除一个ES文档不会立即从磁盘上移除,它只是被标记成已删除。因为段是不可变的,所以文档既不能从旧的段中移除,旧的段也不能更新以反映文档最新的版本。
ES的做法是,每一个提交点包括一个.del文件(还包括新段),包含了段上已经被标记为删除状态的文档。所以,当一个文档被做删除操作,实际上只是在.del文件中将该文档标记为删除,依然会在查询时被匹配到,只不过在最终返回结果之前会被从结果中删除。ES将会在用户之后添加更多索引的时候,在后台进行要删除内容的清理。
5.2、Doc更新 = 删除 + 新增
文档的更新操作和删除是类似的:当一个文档被更新,旧版本的文档被标记为删除,新版本的文档在新的段中索引。
该文档的不同版本都会匹配一个查询,但是较旧的版本会从结果中删除。
5.3、段合并
通过每秒自动刷新创建新的段,用不了多久段的数量就爆炸了,每个段消费大量文件句柄,内存,cpu资源。更重要的是,每次搜索请求都需要依次检查每个段。段越多,查询越慢。
ES通过后台合并段解决这个问题。ES利用段合并的时机来真正从文件系统删除那些version较老或者是被标记为删除的文档。被删除的文档(或者是version较老的)不会再被合并到新的更大的段中。
可见,段合并主要有两个目的:
- 第一个是将分段的总数量保持在受控的范围内(这用来保障查询的性能)。
- 第二个是真正地删除文挡。
ES对一个不断有数据写入的索引处理流程如下:
- 索引过程中,refresh会不断创建新的段,并打开它们。
- 合并过程会在后台选择一些小的段合并成大的段,这个过程不会中断索引和搜索。
合并过程如图:
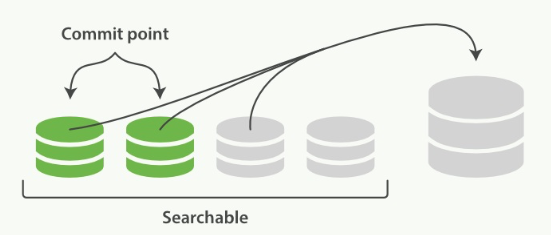
从上图可以看到,段合并之前,旧有的Commit和没Commit的小段皆可被搜索。
段合并后的操作:
- 新的段flush到硬盘
- 编写一个包含新段的新提交点,并排除旧的较小段。
- 新的段打开供搜索
- 旧的段被删除
合并完成后新的段可被搜索,旧的段被删除,如下图所示:

注意:段合并过程虽然看起来很爽,但是大段的合并可能会占用大量的IO和CPU,如果不加以控制,可能会大大降低搜索性能。段合并的optimize API 不是非常特殊的情况下千万不要使用,默认策略已经足够好了。不恰当的使用可能会将你机器的资源全部耗尽在段合并上,导致无法搜索、无法响应。

