
- 1leetcode189 轮转数组(java & python3)_k %= nums.length
- 2从B 树、B+ 树、B* 树谈到R 树 --- 先转了 正复习着ds 呢
- 3Pycharm的安装与基本使用
- 4Vue中axios使用详解_$.ajax 使用axios 写
- 5WordPress Automatic插件 SQL注入漏洞复现(CVE-2024-27956)
- 6浙江事业单位考不考计算机专业知识,浙江事业单位考试计算机相关综合知识,看哪些?...
- 7智慧班牌源码源,SaaS云平台端、智慧校园管理平台端、家长/教师微信移动端、智慧班牌学生端_saas课程管理平台功能及明细
- 8[推荐系统] - 多目标排序 MMoE、PLE_多目标排序模型的结构
- 9git 使用经验_git技术与应用
- 10无锡职业技术学院c语言试卷,无锡工艺职业技术学院c语言测试答案.docx
Nvidia AGX Xavier GMSL 自动驾驶控制器设计方案_gmsl 同步触发
赞
踩
信迈科技的AGX Xavier GMSL 载板,是一款带有×GMSL视频输入接口的嵌入式人工智能计算产品,能够为众多终端设备赋予人工智能计算力,从而有效降低人工智能产品的落地门槛。Xavier能够提供高达32Tops计算能力,能够很好的满足低速无人驾驶,工业机器视觉等场景的图像、激光点云等计算需求。
自动驾驶技术,环境感知是其关键,神经网络算法则是核心。随着自动驾驶技术的大面积落地,传统的通用处理器已不能很好地满足需求,于是专门面向自动驾驶领域的处理器应运而生。在AI和自动驾驶的浪潮下,英伟达也积极转型,将业务中心由图像运算转向了人工智能运算以及自动驾驶。
从2015年起,NVIDIA就发布了Drive系列针对自动驾驶自动驾驶专用芯片和计算平台。 通过借鉴人类数十年来在 AI 领域积累的经验,NVIDIA DRIVE™ 硬件和软件解决方案提供行业领先的性能,旨在帮助汽车制造商、卡车制造商、一级供应商和初创公司开发出自动驾驶汽车。但是一直以来NVIDIA Drive自动驾驶平台以高昂的价格,让很多低速无人车、无人船、高速无人车的制造商望而却步。
针对自动驾驶强劲的市场需求,信迈科技近期推出自动驾驶计算平台GEAC91V。该平台基于NVDIA Jetson AGX Xavier嵌入式GPU模组开发的面向车载应用场景的多处理器控制器,内置双Xavier模组、车规级MCU处理器、CPLD等多种处理器,满足车载应用场景复杂的高实时性、高可靠性需求。
产品特色
-双Xavier处理器,工作在Root-Endpoint模式下
-内置车规级MCU处理器,运行满足车规要求的安全系统
-内置硬件授时同步电路,为自动驾驶车载系统提供安全可靠的时钟源
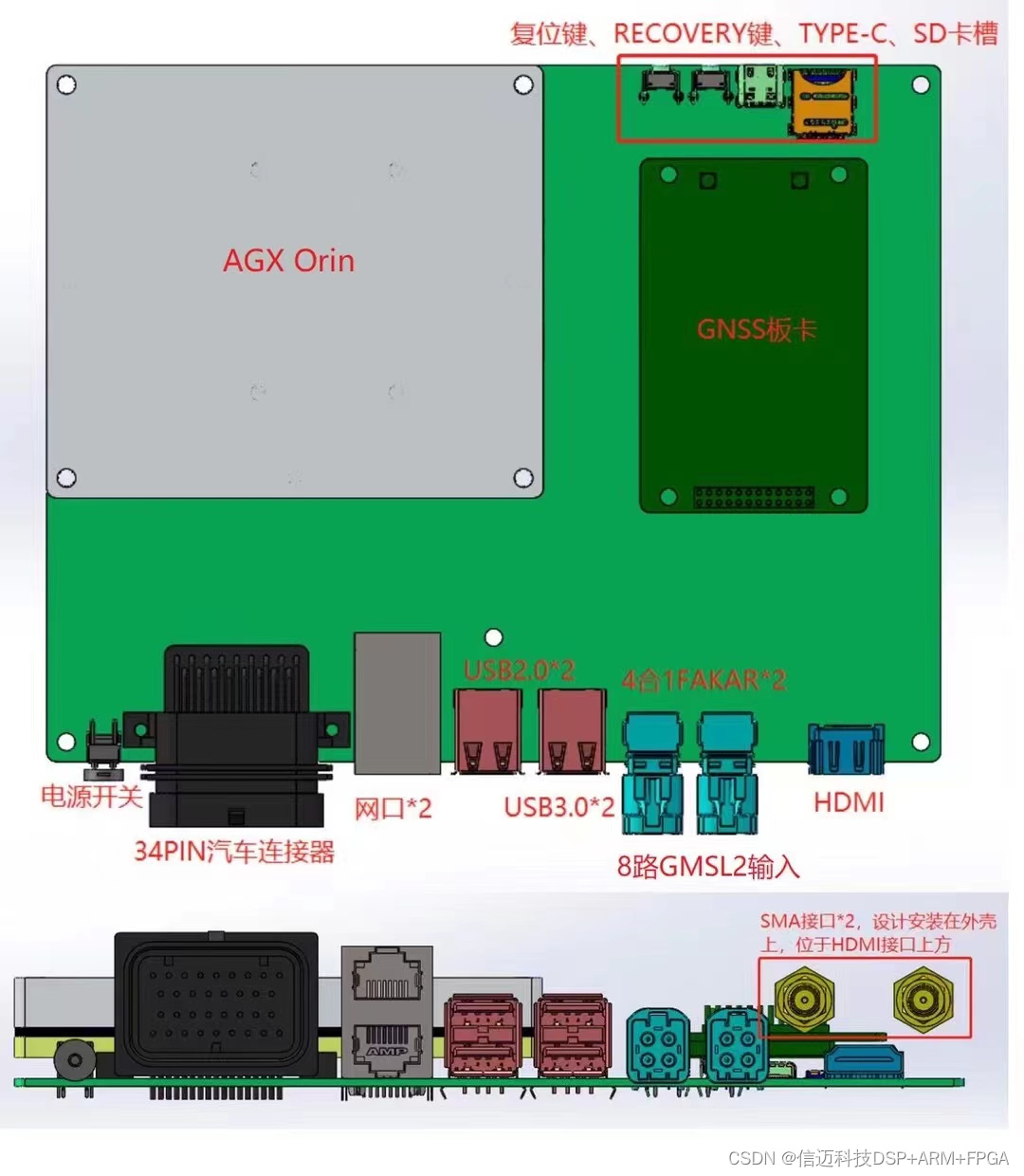
-主要接口资源∶12路GMSL2接口,支持每路独立触发;12路CAN总线接口,2路 LN接口,2踏干兆车载以太网,1路万兆以太网,支持激光需达的Encoder信号接入,支持主备双路供电电源,支持PPS、GPRMC、Tiger,PTP等常用的对外授时接口;主要接口为车规级或M12工规级
-整机防护等级IP67,
-工作温度-20~60°,满足36ms-1000z随机振动要求
- MTBF∶50000小时
-满足CE-EMC认证标准接口
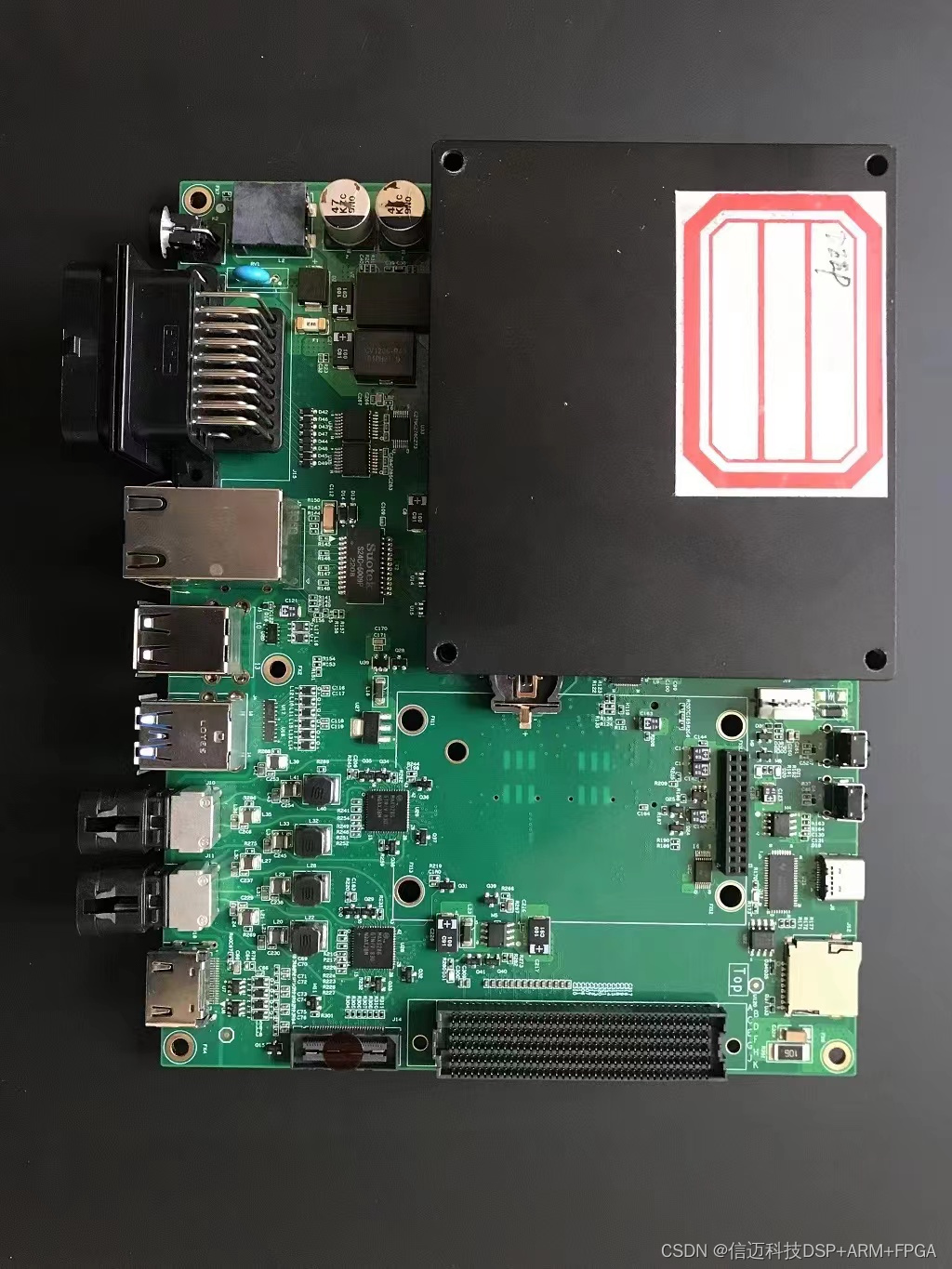
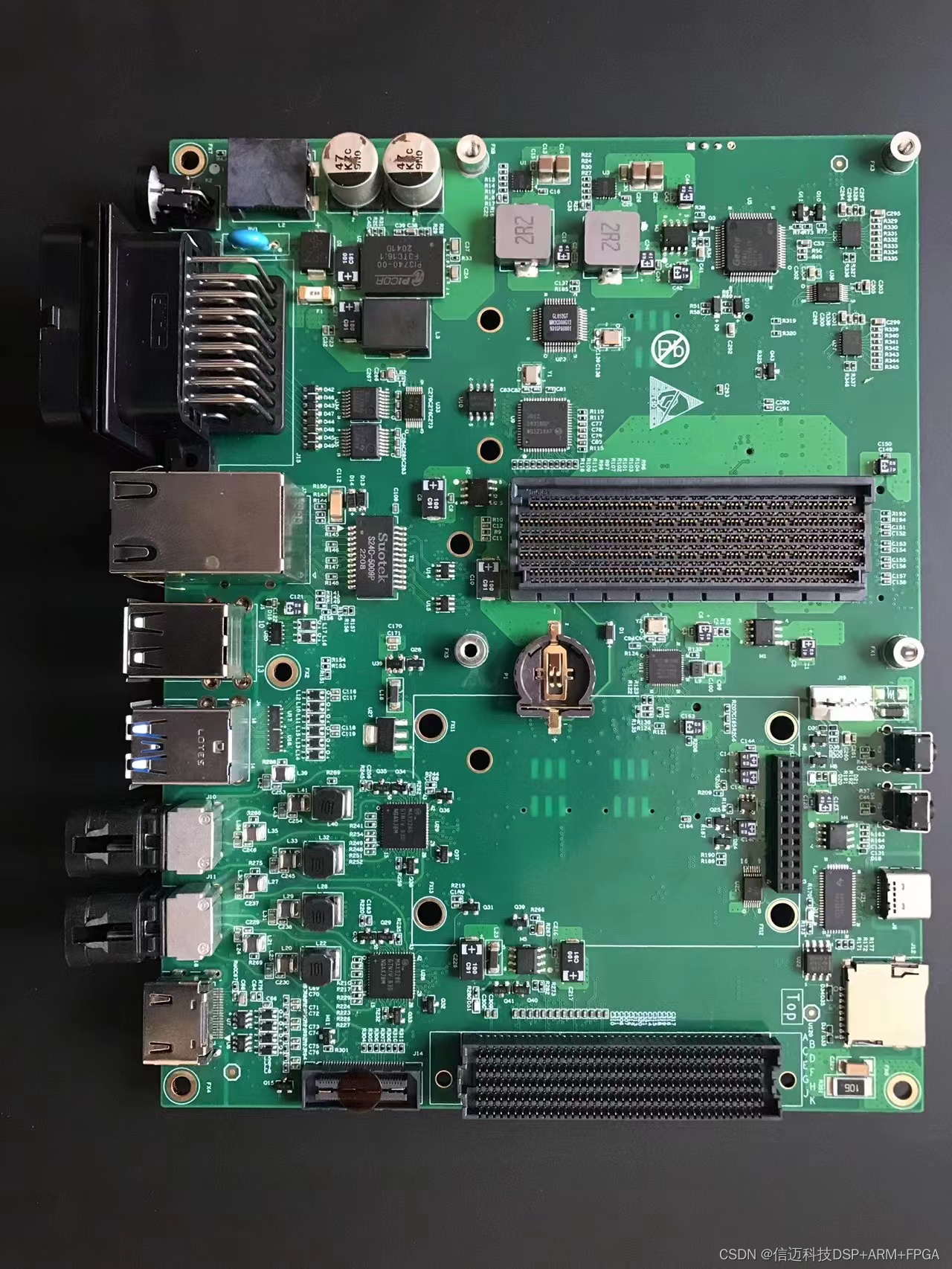

基于NVIDIA Jetson Xavier AGX GMSL硬件设计与软硬件调试
一、设计目标
- 1. 支持Jetson Xavier AGX Devkit 开发套件120Pin (QSH-060-01-H-D-A-K-TR Samtec)
-
- 2. GMSL Deserializer 采用 MAX9296
-
- 3. 支持多路 MAX9295 Serializer 相机
-
- 4. 同时兼容MAX96705即GMSL1
-
- 5. 支持Virtual Channel
-
- 6. 支持Frame sync和独立触发Trigger
二、硬件设计简要说明
- 1. Deserializer 解串器选择MAX9296 支持6Gbps,传输速率更高、可支持Sensor像素更高、帧率快
-
- 2. 硬件在POC段的设计需向下兼容GMSL1(按照Maxim默认设计不支持GMSL1)
-
- 3. 8路摄像头的同步触发设计?
-
- 4. GMSL摄像头与其他传感器的同步方案?
-
- 5. I2C总线与I2C扩展IC 选型
-
- 6. 物料选型特别是电感等
分享两个硬件设计框图

MAX9296/95.png
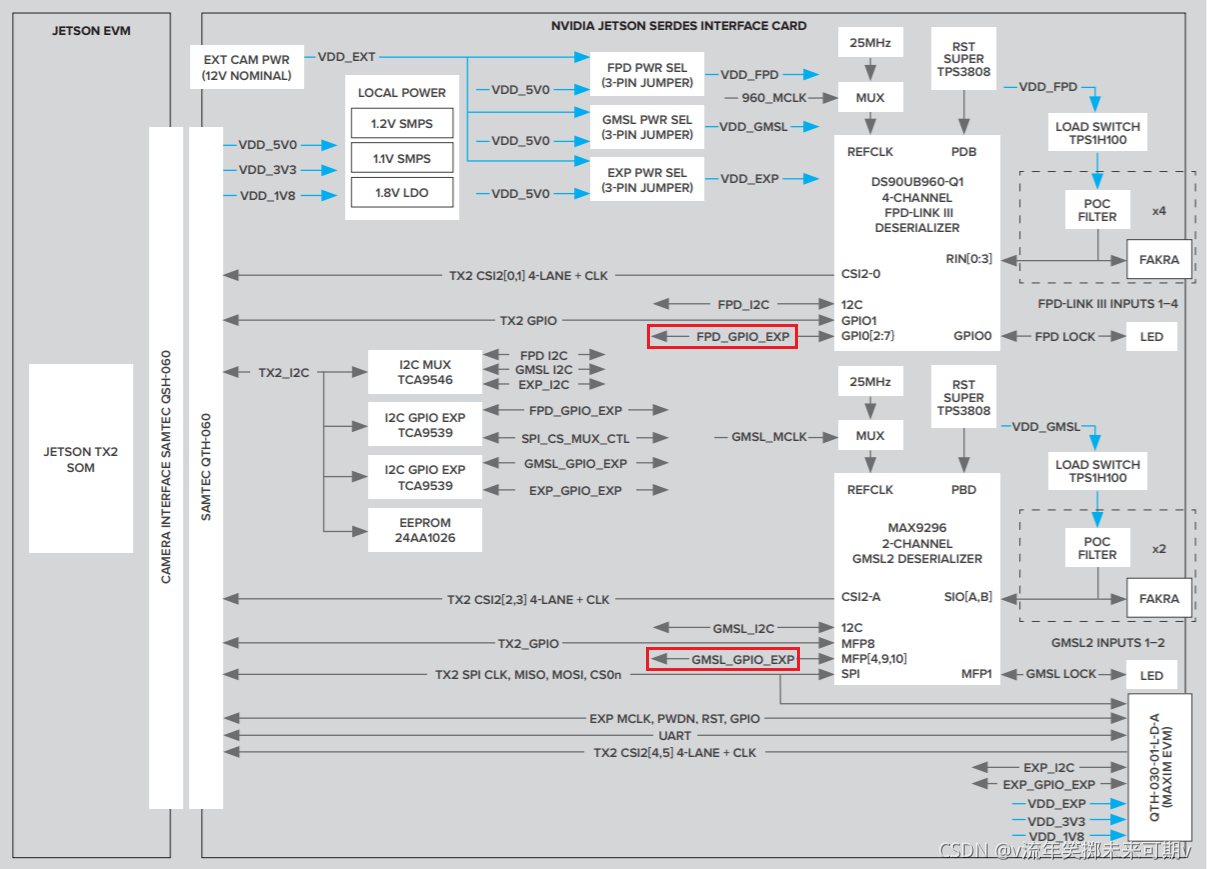
D3.png
三、软件调试踩坑记录
- 1. 先不接GMSL相机,读写MAX9296 I2C寄存器是否正常;
-
- 问题:I2C不通, 检查MAX9296 供电、PWDN、晶振、地址选择等
-
- 2. 接入MAX9295相机,读写MAX9295寄存器是否正常;
-
- 问题:I2C不通,检查相机12V供电、MAX9296初始化参数是否成功
-
- 3. 查看 /dev/video 设备是否已生成 ;
-
- 4. 检查Pipeline lock寄存器、Video link detect和lock 寄存器;
-
- 4. 根据配置RAW/YUV Sensor,选择不同的命令打开摄像头;
-
- 5. 检查确认摄像头端的MFP配置,比如同步MFP GPIO Pin;
-
- 6. 检查同步触发配置,如果同步异常,则需要测量相关MFP信号是否设置成功

四、总结
- 1. GMSL相较于FPDLINK 其应用稳定性、产品应用范围、价格供货等有比较多优势;
-
- 2. 除了美信,日厂ROHM 也已涉足GMSL SerDes 芯片,并有成熟芯片在推广应用;
-
- 3. GMSL 串行器和解串器的设计与调试需要一定的时间与经验累积,不然会走不少的弯路;

