
热门标签
热门文章
- 1JavaScript 基础 二_document elementbyid 设置width
- 2学习 VS2010编程经典示例_vs教程编程实例详解
- 3多益网络2019秋招笔试题_多益笔试
- 4LVS Linux虚拟服务_lvs 回环
- 5spring boot项目打包加密_jar-protect
- 6Android获取NTP网络时间_android 获取ntp
- 7深度学习之基于YoloV5人体姿态摔倒识别分析报警系统_基于yolov5摔倒检测
- 8阿里P5-P7学习路线及薪资待遇
- 9【C++】AVL树/红黑树实现及map与set的封装
- 102024-06-01:用go语言,给定一个从0开始索引的整数数组 nums 、两个正整数 k 和 dist 。 数组的代价是该数组中的第一个元素。 问题要求将数组 nums 分割成 k 个连续且不重叠_数组中特殊等间距元素的和 题目描述:给定一个索引从 0 开始的整数类型数组 nums ,
当前位置: article > 正文
【目标解算】相机内外参数详细解读+坐标系转换_相机内参矩阵
作者:你好赵伟 | 2024-07-17 05:19:29
赞
踩
相机内参矩阵
一、相机参数介绍
1.1 相机内参矩阵
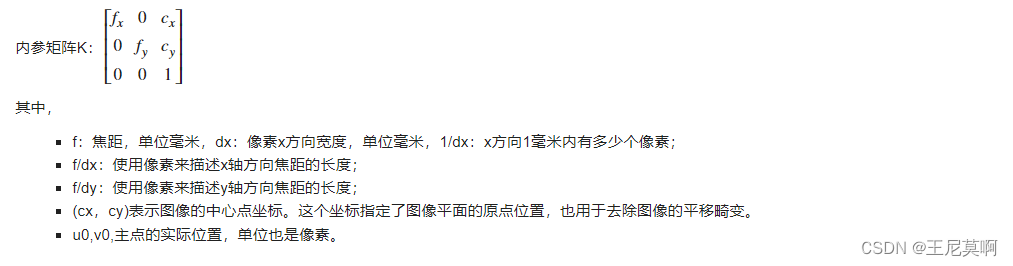
概念:内参矩阵用于描述相机的内部参数,它包含了相机的焦距、主点坐标和图像的畸变等信息。内参矩阵的形式通常为一个3x3的矩阵,常用表示为K。内参矩阵可以将相机坐标系中的三维点映射到图像平面上的二维像素坐标。通过内参矩阵,我们可以进行相机标定、图像校正和三维点云到图像的投影等操作。
标定后的相机内参矩阵为3x3矩阵:
相机标定参照:【鱼眼+普通相机】相机标定。
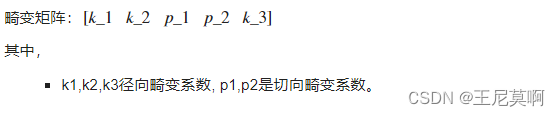
1.2 相机畸变矩阵
普通工业相机畸变矩阵为1x5矩阵: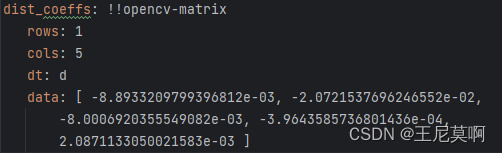
1.3 相机外参矩阵
外参矩阵用于描述相机的外部参数,
推荐阅读
相关标签

